串级调节系统在智能调节器上的应用
2012-04-13 04:58韩宝山
科技传播 2012年2期
韩宝山
阿城继电器股份有限公司,黑龙江 哈尔滨 150302
0 引言
自动调节系统的分类方法繁多,热工生产过程使用最广泛、最基本的是线性。闭环、恒值给定的单回路调节系统。其特点是静态时无静差、动态时无扰动。
1 串级自动调节系统构成
串级调节是由主调节器和副调节器组成。
主调节器为前馈——反馈调节系统:因为当锅炉带有冲击负荷时,需要引入流量信号作为前馈信号输入。即主要扰动作为前馈调节加入反馈系统。
前馈直接根据扰动进行调节,不测量被调量。副调节器为反馈调节系统:是根据被调量与其给定值的偏差进行调节,最后消除偏差。
外环为主调节器,主要完成对被调量的运算功能。内环为副调节器,主要完成对反馈量的运算功能。主调节器完成对偏差信号进行PID运算后,输出信号成为副调节器的串级设定信号。
其系统特征方程:
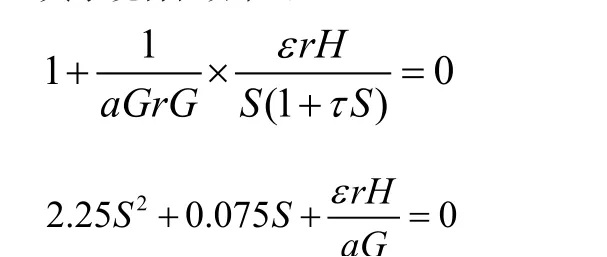
∴aG=0.23 aG在0.23~0.5之间取值
外回路衰减率过低或过高,应改变给水流量反馈参数aG。
同时应注意改变调节器的参数δ值。
2 VI87的原理及组态
在实际过程中,控制量受到执行元件和物理性能的约束而限制在一定范围内,超出范围时,控制量就不再是计算值,而是不期望的饱和值。
由公式中可知:增大PB减小比例作用;减小TI来增强积分作用;增大TD来增强微分作用。比例作用使调节过程快速阶跃使参安息趋于稳定。积分作用使被调量无静态偏差。也会使调节过程产生振荡。微分作用能有效地减小动态偏差。
此调节器最大特点是具有积分分离、输出值切换及PID控制的功能,使调节过程能快速接近设定值且非超调控制。
从积分分离动作切换到PID动作时,用平衡比率值BR过渡,实现无平衡无扰动切换。
由汽包水位与给水流量组成串级系统。
蒸汽流量副回路中,流量作为前馈信号输入。CTL12、CTL13组成主调节器的信号加上了从外部来的前馈输入Z9。
当Z12为0,直接跟踪Z11(输出);
当Z12为1时,DU1>PA8积分分离,输出定值DU1<PA8进行PID运算。
副调节器由CTL04把主调节器的输出作为设定值,给水流量由AI3输入作为副调节器的反馈输入量。
当Z3为1时,输出直接跟踪Z2;
当Z3为0时,DU2〈PA7 进行PID运算DU2〉PA7 积分分离,输出定值。
副调节器的设定方式均为无平衡无扰动切换。
因为在不是串级连接时,主调节器的输出跟踪副调节器的设定值。
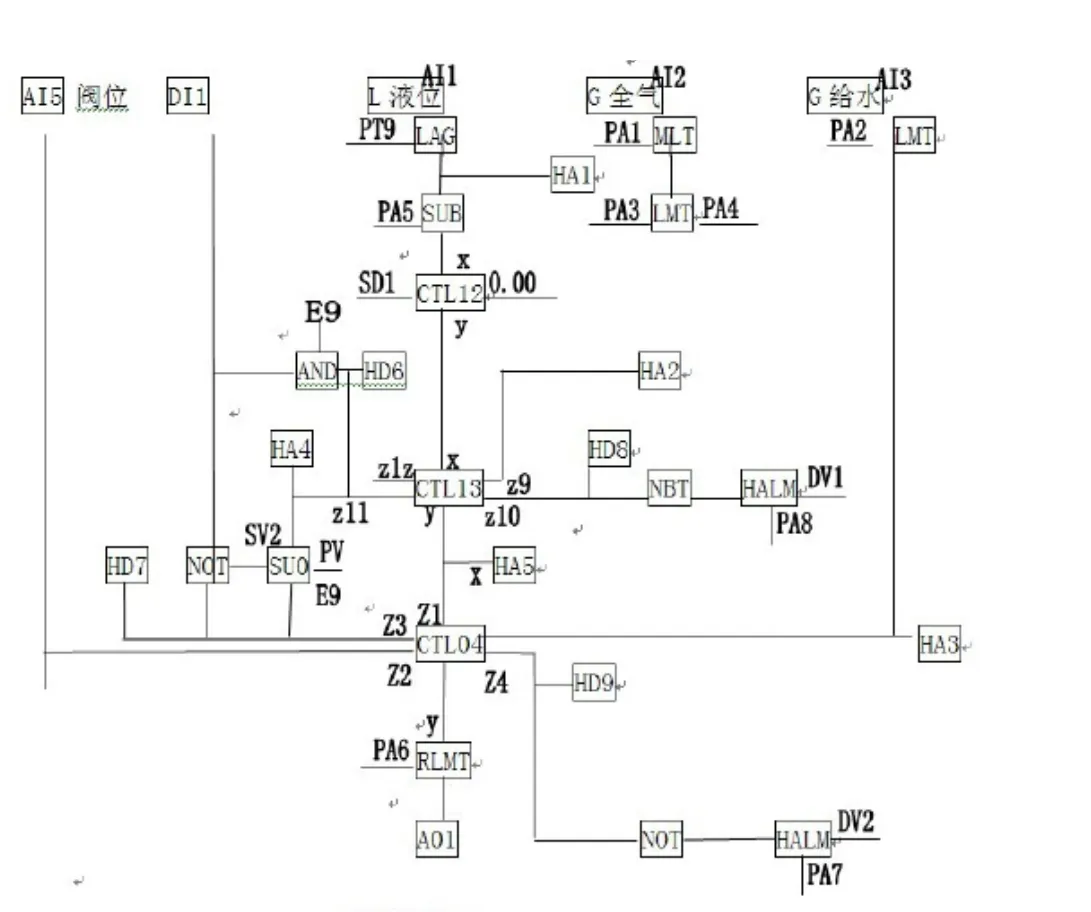
系统组态图
最终实现在手动状态时,调节器跟踪操作器的阀位输出信号;在自动状态时,操作器跟踪调节器的输出。
静态模型分析与具有数字技术的单回路调节器结合,能较好地完成大干扰、大时延、非线性参数的复杂运算,提高运行质量。
3 结论
因单回路调节器具有易修改性、易维护性、诊断功能齐全、用户界面友好,因而具有良好的应用前景。
[1]邱关源.电路[M].高等教育出版社,1982.
[2]康华光.电子技术基础[M].高等教育出版社,1985.
猜你喜欢
青海电力(2022年1期)2022-03-18
湖北农机化(2021年7期)2021-12-07
应用化工(2021年12期)2021-02-21
航空发动机(2020年1期)2020-06-13
自动化仪表(2015年5期)2015-06-15
综合智慧能源(2015年1期)2015-06-05
电源技术(2015年9期)2015-06-05
汽车维修与保养(2015年6期)2015-04-17
电测与仪表(2015年20期)2015-04-09
电测与仪表(2015年3期)2015-04-09