船体分段测量点数据与CAD模型自动匹配方法研究
2012-04-13 09:21管官申玫林焰纪卓尚
哈尔滨工程大学学报 2012年5期
管官,申玫,林焰,纪卓尚
(1.大连理工大学 船舶CAD工程中心,辽宁 大连 116024;2.大连理工大学 工业装备结构分析国家重点实验室,辽宁 大连116024;3.青岛远洋船员职业学院 船舶与海洋工程系,山东 青岛 266071)
在现代造船业中,精度控制是保证船舶建造质量、提高建造效率的重要手段之一[1].目前,日本和韩国已进入了精度造船的时代,我国造船业正从余量造船向无余量造船过渡,所以应用现代数字化的造船精度控制设备和软件,是造船业向无余量造船过渡的一个重要手段.现有的精度控制设备主要是全站仪[2],软件有韩国SAMIN、青岛海徕的DACS等,这些软件都需要人工手动匹配测量点数据与CAD模型,匹配结果也未必最优.因此,船体分段测量点数据与CAD模型自动精准匹配的研究对于造船企业准确分析船体分段的建造误差并给出合理的建造精度评价具有重要意义[3-6],也是船体建造精度控制的关键技术之一.
1 自动匹配方法
点云匹配属于计算机图形学的研究范畴,国内外的学者已经提出多种匹配方法[7-8],总体来说分为基于几何特征匹配[9](如PCA法),基于优化方法匹配(如ICP[10-11](最近点迭代)法).目前这些方法已经在建筑、地质、机械设计等行业中得到应用.对于船舶行业,船体分段通过全站仪得到测量点云与其他行业通过三维激光扫描仪得到的点云相比,点数少、密度低、不能仅依据测量点拟合曲面,属于稀疏散乱点云[12],因此一些基于曲线曲面拟合的迭代方法不能适用,如ICP法.本文将点云匹配方法与船舶行业测量数据特点相结合,提出了适用于船舶精度控制的测量点数据与CAD模型自动匹配方法.
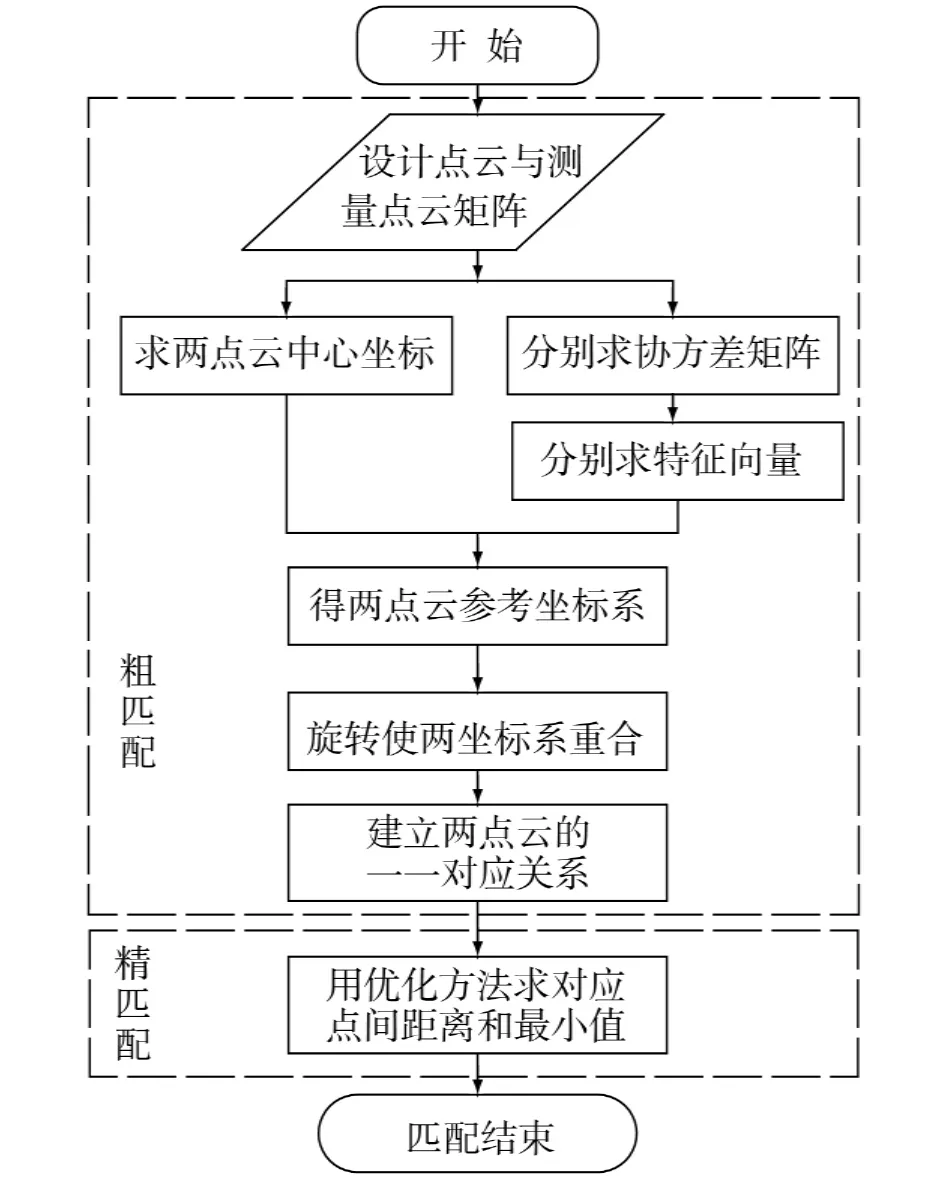
图1 船舶精度控制的测量点数据与CAD模型自动匹配流程Fig.1 Flow chart of auto matching of measuring points data with CAD model for hull blocks
匹配过程可以分为2部分:粗匹配与精匹配.
由于船舶分段建造摆放位置不同、测量点坐标与设计点坐标不在同一坐标系下等原因,造成坐标值相差过大.通过粗匹配缩小点云间的平移偏差和旋转偏差,为精匹配提供良好的初值.目前大多数造船精度控制软件均采用最简单的粗匹配,即利用人工选择3对以上的控制点来粗略完成.由于这种方法需要人工参与选点,浪费时间,匹配结果也很大程度上依赖于人员的经验.为避免上述问题,采用PCA法进行粗匹配,再通过搜索最近点法来确定对应点对.
由于船舶建造误差造成测量点集与设计点集间不能完全吻合,通过精匹配使点集匹配达到最为合理,从而确定每个测量点与设计点的偏差量.现有的造船精度控制软件基本都采用人工匹配,本文采用欧拉旋转理论对粗匹配后的测量点集进行旋转和平移调整使匹配结果最优.自动匹配过程如图1所示.
2 基于PCA的粗匹配数学模型
PCA是通过分析离散数据点的分布特征,来求得物体的主要分布规律和方向.其原理为:首先,找到随机变量的均值,也就是实际数据点云的中心.然后计算点云顶点的协方差矩阵,找出它的特征向量.由矩阵理论可知,实对称阵的特征向量是两两垂直,这与三维空间正好相符合.这3个特征向量的几何意义分别是:空间内点最密集的方向、空间内点最稀疏的方向,过点云中心并且与最密集的方向垂直的平面内点最密集的方向.
基于PCA的粗匹配具体过程:
1)分别构造设计点集矩阵和测量点集矩阵:
2)分别求出2个点集中心,即点集坐标的均值:设计点集中心,测量点集中心
3)分别求出2点集的协方差矩阵:设计点集协方差矩阵:

测量点集协方差矩阵:

式中:X,Y,Z分别为设计点集矩阵的3个列向量.同理X',Y',Z'
4)分别求协方差矩阵的特征值和特征向量.按特征值从大到小对应的特征向量构成向量矩阵.由于该协方差矩阵为实对称矩阵,实对称阵的特征向量互相正交,对于2组点集数据,以中心为坐标系的原点,求得的3个特征向量对应XYZ轴,建立点集的参考坐标系.
5)将2个参考坐标系调整一致,再将此参考坐标系调整到与世界坐标系一致,这样可以得到:设计点集矩阵P与变换前相同,测量点集矩阵经变换后得到新矩阵,矩阵的行向量表达点坐标.
3 基于欧拉旋转矩阵的精匹配数学模型
基于欧拉旋转理论[13]对测量点进行旋转和平移调整,使之与设计点匹配,目标为所有测量点调整后坐标与设计点的距离和最小.
采用数学表达式:

式中:Pi=(xi,yi,zi)为设计点为测量点调整后坐标点.
令设计点Pi的齐次坐标为(xi,yi,zi,1),测量点调整后坐标点的齐次坐标为由于是由测量点经过平移或旋转变换得来,所以可以由测量点进行坐标变换得到.测量点在空间中的移动有6个自由度,即:沿x,y,z方向的平移Δx、Δy、Δz,以及绕x,y,z轴的旋转角度Δα、Δβ、Δγ.测量点齐次坐标为(x0i,y0i,z0i,1),则调整后点的齐次坐标可以表达为

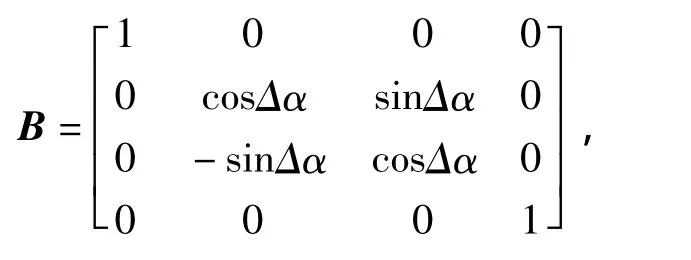

将式(2)代入式(1)中,S成为有6个变量的函数.由于粗匹配可以保证设计点与测量点基本吻合,所以ΔαΔβΔγ的变化范围在的最小值可以由非线性多维有约束最优化方法来解决.初值可以定为
4 实例分析
图2为施工现场船体测量的照片.图3为某一双壳散货船的三维设计分段模型,其中有编号的点为选择的精度管理点,此分段共取52个精度管理点,表1为设计模型中精度管理点的理想坐标,表2为施工现场采用全站仪测量获得的精度管理点的测量坐标,测量过程中不需要注意测量点与理论点的对应关系,只需把这52个点都测量出来即可,粗匹配会自动找出对应点对.有了理论点和测量点后即可构造出设计点集矩阵和测量点集矩阵,进而求出中心坐标、协方差矩阵及其特征向量,建立点集的参考坐标系使其重合,再搜索最近点来确定对应点对,再应用精匹配方法对测量点集进行旋转和平移调整使匹配结果达到最优,这样就完成了设计点集和测量点集的自动匹配了.图4为两组点都统一到三维设计分段模型的坐标系下的图形,表3为粗匹配后的测量点集坐标,表4为精匹配后的测量点集坐标,图5为自动匹配后的效果显示,表5为自动匹配后各点的建造偏差,此偏差就是此船体分段的建造误差.表6为手动匹配后各点的建造偏差,这项数据会因为手动选点的不同而随之变化.自动匹配后所有点的偏差和为759 mm,手动匹配后所有点的偏差和为762 mm,说明手动匹配没有达到最优.
经过本文算法的自动匹配后,可见此船体分段的建造误差最大点为3号点(Δx=14.2 mm,Δy= 17.7 mm,Δx=-9.6 mm),由此值可以对该分段进行建造精度控制评价.注:表1、表2中“点的编号”并不需要对应同一点,粗匹配会自动找出对应点对,这里只是为了便于表达,把测量点也编上了对应号.

图2 施工现场船体测量Fig.2 Hull measurement in shipyard
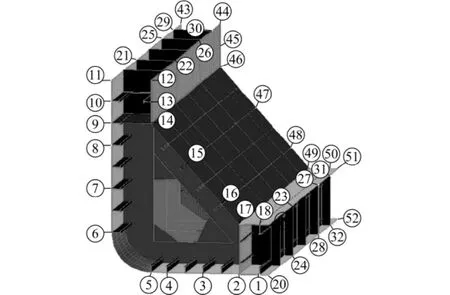
图3 三维设计模型及精度管理点Fig.3 3D design model and precision management points
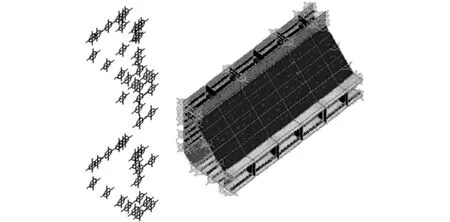
图4 测量点集与模型理论点集Fig.4 Measurement points and points in model

图5 自动匹配后的效果显示Fig.5 Results show after auto matched
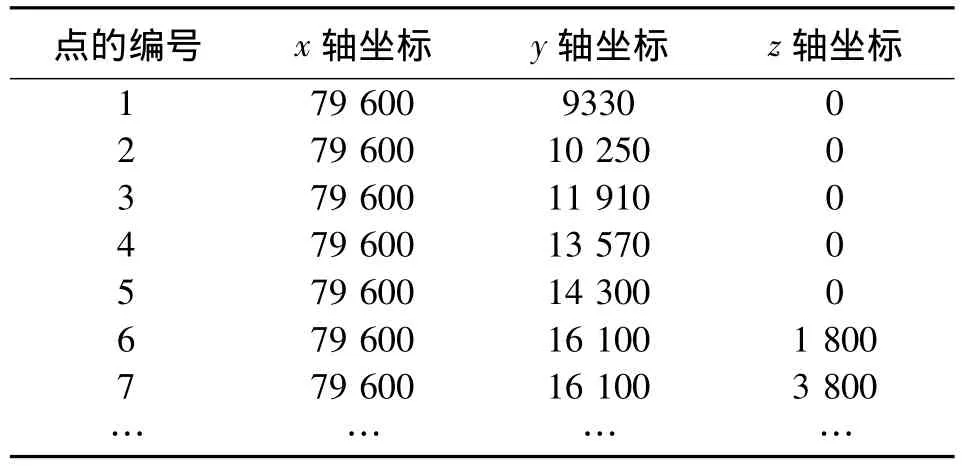
表1 设计模型中精度管理点的理想坐标Table 1 Coordinates of precision management points in design model

表2 全站仪测量的精度管理点的测量坐标Table 2 Coordinates of precision management points measured by total station
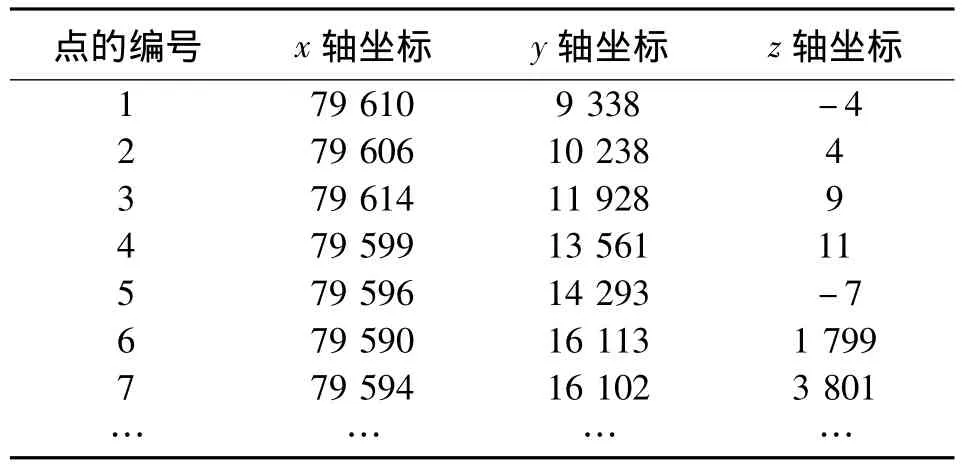
表3 粗匹配后的测量点集坐标Table 3 Coordinates of measurement points after rough matched
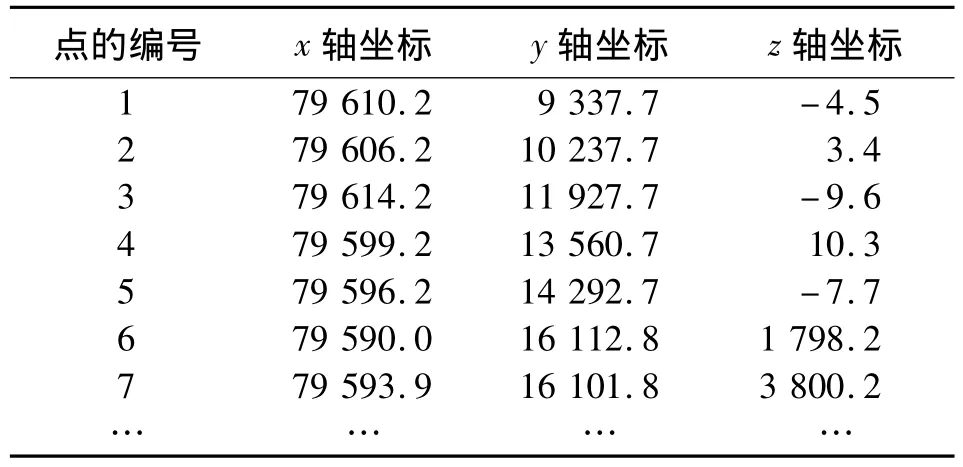
表4 精匹配后的测量点集坐标Table 4 Coordinates of measurement points after precise matched
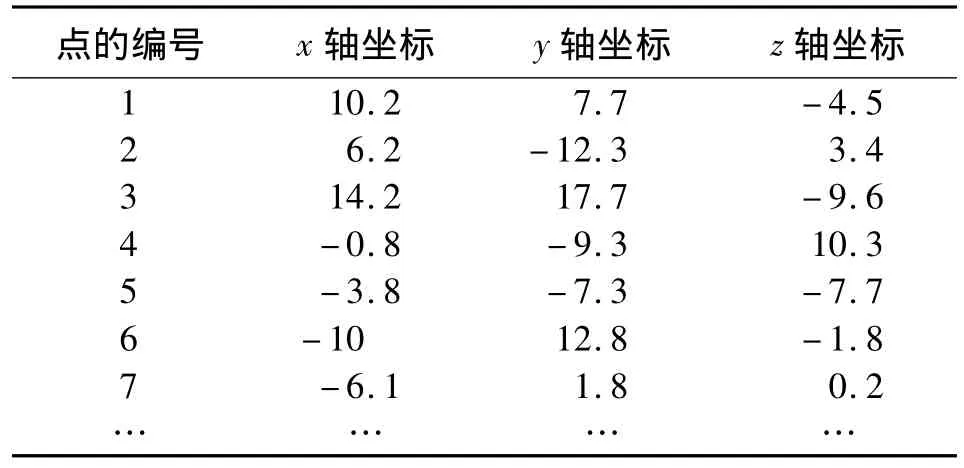
表5 自动匹配后各点的建造偏差Table 5 Construction error of the points after auto matched

表6 手动匹配后各点的建造偏差Table 6 Construction error of the points after manual matched
5 结束语
本文在研究国内外现有的先进精度控制系统的基础上,指出其测量点数据与CAD模型匹配方法的不足之处,提出一种不需要明确对应关系的测量点与CAD模型理论点自动匹配算法.该算法首先采用主元分析(PCA)法来粗匹配二者,再应用搜索最近点法来确定对应点对,然后采用欧拉旋转理论来精匹配二者使匹配结果最优.实例表明,该算法实现了船体分段测量点数据与CAD模型的自动精准匹配,能够真实反映船体分段建造的误差信息,为后续的大合拢搭载提供指导.
但是这种自动匹配算法还有以下2种情况有待于进一步完善:1)船体分段的测量点在不同方向上的精度要求不同;2)船体分段上的部分点有特殊约束,如垂直度、水平度和平面度等要求.因此,在这种自动匹配算法的基础上还应不断完善,使其更加适应造船实际.
[1]许融明,杨港,赵任张.造船精度管理[J].船舶工程,2010,32(S1):8-11.
XU Rongming,YANG Gang,ZHAO Renzhang.Shipbuilding accuracy control[J].Ship Engineering,2010,32(S1):8-11.
[2]潘国荣,张鹏,孔宁.造船精度控制系统中用移站测量获取点位信息的一种方法[J].大地测量与地球动力学,2010,30(5):121-124.
PAN Guorong,ZHANG Peng,KONG Ning.A station-moving measurement method for acquring point position information in precision control system for ship building[J].Journal of Geodesy and Geodynamics,2010,30(5):121-124.
[3]GUAN Guan,SHEN Mei,LIN Yan,et al.A method for the automatic registration of hull blocks point clouds[C]// Advanced Materials Research,Xiamen,China,2012: 3089-3093.
[4]刘涛,王宗义,金鸿章,等.船体分段三维数字化测量数据配准[J].哈尔滨工程大学学报,2010,31(3):345-349.
LIU Tao,WANG Zongyi,JIN Hong zhang,et al.The data registration of 3-D digital measurement for hull blocks[J].Journal of Harbin Engineering University,2010,31(3): 345-349.
[5]申玫,管官.一种船体分段测量点云自动匹配的算法[J].造船技术,2011,29(302):17-18.
SHEN Mei,GUAN Guan.An algorithm for the automatic registration of hull blocks point clouds[J].Marine Technology,2011,29(302):17-18.
[6]SHEN Mei,GUAN Guan,WANG Hongzhi.Automatic registration of hull blocks point clouds based on SVD[C]//Proceedings of the 2011 2nd International Conference on Information Technology and Scientific Management,Tianjin,China,2011,2143-2145.
[7]LUÍSA F B,JOAO M R S T.Matching of objects nodal points improvement using optimization[J].Inverse Problems in Science and Engineering,2006,14(5):529-541.
[8]罗先波,钟约先,李仁举.三维扫描系统中的数据配准技术[J].清华大学学报:自然科学版,2004,44(8):1104-1106.
LUO Xianbo,ZHONG Yuexian,LI Renju.Data registration in 3-D scanning systems[J].Journal of Tsinghua University:Science and Technology,2004,44(8):1104-1106.
[9]KO K H,MAEKAWA T,PATRIKALAKIS N M.An algorithm for optimal free-form object matching[J].Computer-Aided Design,2003,35(10):913-923.
[10]BESL P J,MCKAY N D.A method for registration of 3-D shapes[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,1992,14(2):239-256.
[11]杨现辉,王惠南.ICP算法在3D点云配准中的应用研究[J].计算机仿真,2010,27(8):235-238.
YANG Xianhui,WANG Huinan.Application research of ICP algorithm in 3D point cloud alignment[J].Computer Simulation,2010,27(8):235-238.
[12]CASTELLANI U,CRISTANI M,FANTONI S,et al.Sparse points matching by combining 3D mesh saliency with statistical descriptors[J].Computer Graphics Forum,2008,27 (2):643-652.
[13]何援军.计算机图形学[M].北京:机械工业出版社,2006:87-191.
猜你喜欢
九江职业技术学院学报(2022年1期)2022-12-02
航空学报(2022年5期)2022-07-04
保定学院学报(2022年2期)2022-04-07
模具制造(2019年10期)2020-01-06
自动化与仪表(2019年2期)2019-03-06
数字通信世界(2019年1期)2019-02-14
许昌学院学报(2018年4期)2018-05-02
中华建设(2017年1期)2017-06-07
造船技术(2016年6期)2017-01-13
航运交易公报(2016年8期)2016-03-21