一种利用单信标修正AUV定位误差的方法
2012-05-28 01:22张福斌张永清
水下无人系统学报 2012年1期
张福斌, 张永清
一种利用单信标修正AUV定位误差的方法
张福斌, 张永清
(西北工业大学 航海学院, 陕西 西安, 710072)
针对配置有捷联惯导(SINS)/多普勒速度仪(DVL)/深度传感器组合导航定位系统的自主水下航行器(AUV)的定位误差随时间增大, 以及采用GPS修正定位误差引起的AUV隐蔽性降低等问题, 提出了一种利用水下固定单信标修正SINS/DVL/深度传感器组合定位误差的方法。该方法首先利用水声测距原理测量出AUV与水下固定单信标的距离, 然后基于空间几何关系计算出AUV的实时位置, 最后通过卡尔曼滤波连续修正AUV的定位误差。仿真结果表明, 该方法可以有效减小AUV的定位误差, 有较好的工程应用价值。
自主水下航行器; 组合导航定位系统; 定位误差; 单信标
0 引言
精确的导航定位是自主水下航行器(autonomous underwater vehicle, AUV)完成任务的重要保证。AUV传统导航方法主要采用捷联惯性导航系统(strapdown inertial navigation system,SINS)、多普勒测速仪(Doppler velocity logger, DVL)、深度传感器和全球定位系统(global positioning system, GPS)构成组合导航系统[1-4]。AUV的航行深度一般采用深度传感器直接测量, 当AUV潜入水中时, 以DVL辅助SINS实现导航、定位。由于DVL辅助SINS进行导航定位过程中, 定位误差随时间增大, 故AUV每隔一段时间, 需要上浮到近水面, 通过其上安装的GPS天线, 接收GPS信号, 对累积的定位误差进行修正, 由此使得AUV的航行隐蔽性降低。另外, 当AUV作业深度较大时, 上浮接收GPS信号过程中会导致AUV产生较大能源消耗。
为延长AUV在水下作业时间, 本文提出一种利用水下固定单信标(短索锚定)修正SINS/ DVL误差的新方法。假设单信标与AUV均配置水声通信装置, 当AUV航行到离信标一定距离时, 首先与信标建立水声通信连接, 然后与信标进行时间统一, 接着以直线航行方式通过信标周围区域。在AUV直线航行过程中, 信标以一定时间间隔连续发射水声脉冲, AUV接收水声脉冲, 并根据水声脉冲在水中的传播时间及声速计算出AUV相对于信标的距离, 最后AUV利用自身导航定位信息及与信标的相对几何关系计算出自身实时位置, 进而实现对SINS/DVL组合累积定位误差的修正。
1 利用单信标对AUV定位原理
步骤1: 当AUV探测到单信标后, AUV首先与信标建立水声通信连接, 接着信标广播自身位置信息及时间信息, AUV接收信标位置信息并与信标进行时间统一[5]。



同样, 由三角形面积公式可得

图1 自主水下航行器与信标的相对几何关系
Fig. 1 Geometric relations between AUV and beacon






2 导航系统误差模型
选取北天东坐标系为导航坐标系。在建立组合系统各子系统的误差模型方程的基础上[2,3], 设计SINS/DVL/信标联邦滤波器[4], 如图2所示。
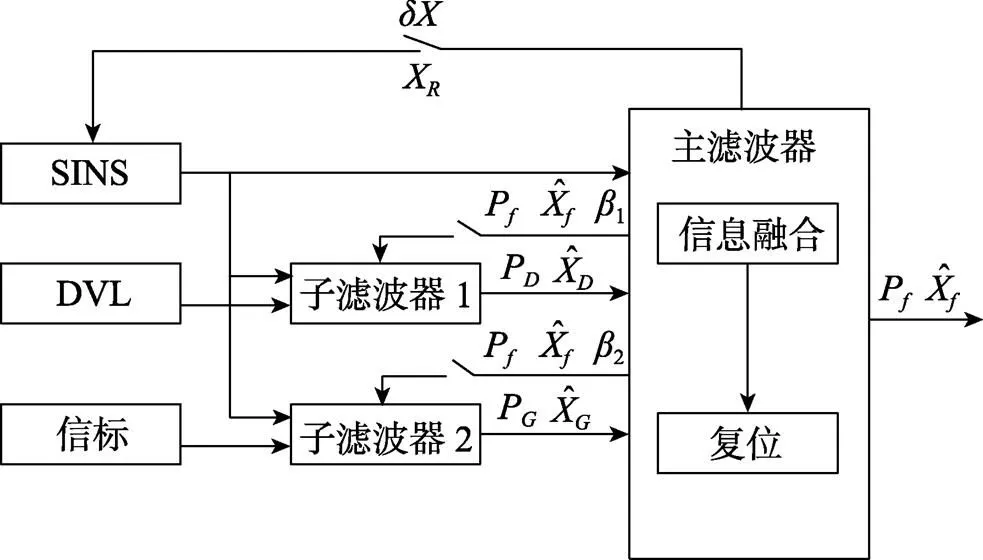
图2 捷联惯导系统/多普勒测速仪/信标联邦滤波器结构示意图
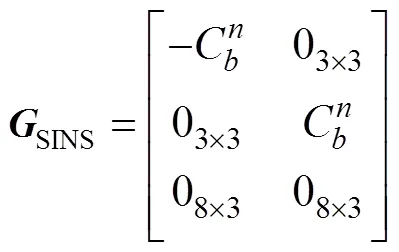
SINS的误差状态方程为




DVL的误差状态方程为

其中



SINS/DVL组成子系统的状态方程为

式中:
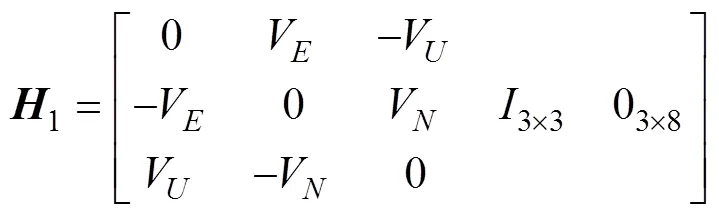
SINS/DVL组成子系统的量测方程为

式中:
SINS/信标组成子系统的状态方程与SINS的误差状态方程相同, 量测方程为

式中:






3 仿真结果与分析
为检验算法的有效性和可靠性, 进行仿真分析。SINS的误差源参数如表1所示, DVL的误差源参数如表2所示。

表1 SINS误差源参数
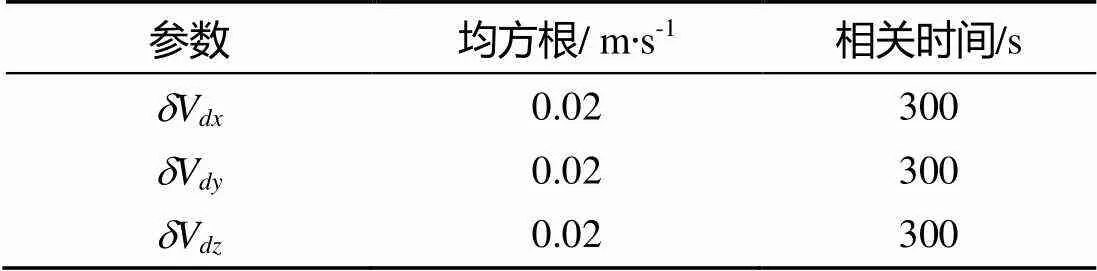
表2 DVL误差源参数


图3 AUV定位误差

4 结束语
针对AUV长时间水下作业过程中, SINS/ DVL/深度传感器组合导航定位误差累积问题, 提出了一种利用单信标修正定位误差的方法, 首先利用水声延迟测距, 然后利用信标与AUV的相对几何关系连续计算AUV的地理位置, 进而修正累积的定位误差。仿真结果显示, 该方法可显著减小累积的定位误差。
本文所提方法对水声通信数据率要求低, 长时间水下作业的AUV采用该方法修正后, 定位误差明显减小, 该方法具有较好的工程应用价值。
[1] 秦永元. 惯性导航[M]. 北京: 科学出版社, 2006.
[2] 张福斌. 水下航行器捷联惯导初始对准及组合导航技术研究[D]. 西安: 西北工业大学, 2008.
[3] 严恭敏. 捷联惯导系统动基座初始对准及其相关问题研究[R]. 西安: 西北工业大学, 2008.
[4] 秦永元, 张洪钺, 汪叔华. 卡尔曼滤波与组合导航原理[M].西安: 西北工业大学出版社, 1998.
[5] Maczka D K, Gadre A S, Stilwell D J. Implementation of a Cooperative Navigation Algorithm on a Platoon of Autono- mous Underwater Vehicles[C]//Proceedings of MTS/IEEE, 2007: 730-735.
Correcting Localization Error with a Single Beacon for AUV
ZHANG Fu-bin, ZHANG Yong-qing
(College of Marine Engineering, Northwestern Polytechnical University, Xi′an 710072, China)
The localization error of an AUV′s integrated navigation positioning system, which is composed of strapdown inertial navigation system (SINS), Doppler velocity logger (DVL) and depth sensor, increases with time, and the hidden performance of the AUV will decrease in correcting the error via GPS. In this paper, a new method is proposed to correct the localization error of the AUV's navigation system by adopting a fixed beacon under water. In this method, the principle of acoustic ranging is used to measure the distance between AUV and beacon, then the real-time position of the AUV is calculated according to spacial geometric relationships, and the localization error of the AUV′s navigation system is corrected by Kalman filter. Simulation results show that the present approach can correct AUV′s localization error effectively, which infers an application value in engineering.
autonomous underwater vehicle(AUV); integrated navigation positioning system; localization error; single beacon
TJ630.33
A
1673-1948(2012)01-0038-04
2011-04-28;
2011-08-06.
国家自然科学基金(61040055), 西北工业大学基础研究基金(JC20100224).
张福斌(1972-), 男, 副教授, 主要从事水下航行器导航与控制技术研究.
(责任编辑: 杨力军)
猜你喜欢
儿童与健康(幼儿教师参考)(2021年7期)2021-08-03
煤气与热力(2021年6期)2021-07-28
兵器装备工程学报(2021年1期)2021-02-22
艺术大观(2019年21期)2019-10-12
西安航空学院学报(2019年3期)2019-07-26
价值工程(2018年13期)2018-05-03
北京航空航天大学学报(2017年1期)2017-11-24
北京航空航天大学学报(2017年5期)2017-11-23
北京航空航天大学学报(2017年12期)2017-04-23
火控雷达技术(2016年1期)2016-02-06