鱼雷尺度多目标多干扰半实物仿真环境设计与实现
2012-05-28 01:22赵罡,岳青
水下无人系统学报 2012年1期
赵 罡, 岳 青
鱼雷尺度多目标多干扰半实物仿真环境设计与实现
赵 罡, 岳 青
(中国船舶重工集团公司 第705研究所, 陕西 西安, 710075)
随着信号检测方法及计算机技术的发展应用, 鱼雷自导系统性能不断提高, 水下尺度多目标识别已成为检测现代鱼雷自导系统水声对抗能力的重要指标之一, 但相关实航测试环境却难以实现。通过对尺度多目标有效性判断及遮蔽计算的分析, 依据实时性原则设计了信号实时生成算法并构建了半实物仿真系统, 对鱼雷尺度多目标多干扰环境进行了模拟, 为试验室环境检测鱼雷水声对抗能力提供了便捷有效的手段。验证结果表明, 该系统可以满足相关仿真需求。
鱼雷自导系统; 半实物仿真; 尺度多目标多干扰; 仿真建模; 信号实时生成算法
0 引言
随着现代科学技术的飞速进步, 水声网络构建不断完善, 水中兵器日益计算机化, 水下作战中的水声对抗也在向集群化、网络化方向发展, 水声对抗作战环境将更为复杂、方式更为灵活, 多目标和多类型水声对抗必将成为水中主战武器——鱼雷所面临的迫切挑战。
基于成本、技术条件及实现难度等综合因素, 多目标/干扰的实航试验环境是难以构建的, 而在作为检测鱼雷作战性能重要手段之一的试验室仿真系统中模拟多目标/干扰的试验态势, 则具备构建快速、灵活、针对性强、成本可控等优点, 因此是一种检验新型鱼雷复杂作战条件下目标检测及识别能力的可行方法, 并成为当前水声对抗研究的热点问题之一[1-2]。
1 尺度目标/干扰亮点建模
现代鱼雷武器均具有尺度目标识别能力, 在进行多目标多干扰的仿真建模时需满足这一需求。研究已经证明了多亮点模拟尺度目标算法的可行性[3-5], 并给出了相关试验结果。
为满足复杂半实物仿真系统的实时性要求, 鱼雷多尺度目标/干扰自导半实物仿真系统采用了简化亮点模型, 即只考虑亮点镜面反射回波, 并认为同一目标体的各亮点具有同样的速度。则在常用的线性调频(linear frequency modulation, LFM)及双曲调频(hyperbolic frequency modula- tion, HFM)宽带信号调制模式下, 其单亮点目标回波时域信号如式(1)和式(2)[6]。

式中:0为回波声压;0为LFM发射信号最低频率/HFM发射信号时间中心频率;f为HFM发射信号算术中心频率;为发射信号频率带宽;为发射信号脉冲宽度;为亮点目标回波延时;为多普勒压缩因子,=1+2V/;()为亮点回波信号强度。
2 多目标多干扰仿真建模
出于仿真结果正确性及系统工作效率的考虑, 主要需解决目标有效性的判别及尺度目标遮蔽两方面的问题, 具体说明如下。
2.1 目标有效性判别
如图1所示, 设鱼雷自导接收波束的水平和垂直开角为和, 取坐标系圆点位于鱼雷声中心,轴与鱼雷声轴重合,轴向上,轴水平, 并记此坐标系为鱼雷声轴坐标系。则自导接收波束椭椎体可描述为

设目标体的中心坐标为(1,1,1), 在轴上取点(1, 0, 0)。
将=1,/=1/1与式(3)联立, 解出直线与发射波束椭锥面的2个交点坐标
1(2,2,2),1(3,3,3)

图1 目标有效性判断示意图
取任一交点到点的距离1, 以及目标体中心点到点的距离0, 比较1和0, 如果1>0, 则认为目标体在鱼雷自导接收波束锥体内,目标有效; 否则超出锥体, 目标无效。
2.2 尺度目标/干扰遮蔽计算
真实尺度目标/干扰遮蔽的情况较为复杂[5], 仿真时可仅从几何角度考虑尺度目标/干扰相互遮蔽问题。如图2所示, 对于2个有效尺度目标/干扰, 在鱼雷声轴坐标系中: 令鱼雷位于坐标原点处, 尺度目标/干扰1长1, 描述为(1,1,1,1,1), 尺度目标/干扰2长2, 描述为(2,2,2,2,2), 其中和分别为尺度目标的偏航角和俯仰角。一般潜艇类目标的俯仰角都较小, 可取1=2=0以简化计算。

图2 遮蔽可能性示意图
图2中, 如果2个尺度目标/干扰中心与平面的2个夹角相差较小(差别范围由雷目距离及目标垂直方向尺度确定), 则2个尺度目标/干扰可能存在遮蔽现象, 否则不存在遮蔽现象。
当存在遮蔽可能时, 根据式(4)及式(5)可解得目标1的两端坐标, 进而解出两端与轴的夹角11,12。


同样, 对尺度目标/干扰2解出其两端与轴的夹角21,22, 如果两组夹角间存在重合, 则判定2个尺度目标/干扰存在遮蔽现象, 否则不存在遮蔽现象。
当存在遮蔽现象时, 其中一种情况如图3所示。
图3 尺度目标/干扰遮蔽计算示意图
根据式(6)可计算出遮蔽点(x,y)坐标。
由此可计算出2个尺度目标/干扰的有效部分, 在得到每一尺度目标/干扰的有效回波信号后, 将它们按照各自抵达雷头的时间顺序对应叠加, 就可得到声场中的尺度目标/干扰回波信号。
3 回波信号生成算法及软件设计
根据试验需求, 每一尺度目标/干扰可由3~5个亮点构成, 采用上述简化亮点及遮蔽模型, 使用一块主频为1.5 GHz的PPC7448CPU, 在仿真步长为5 ms, 信号采样率为250 kHz情况下, 则每步计算需生成250×5 = 1250组浮点数据加和, 其中每组数据由信号脉冲个数决定, 为1~4个不等。
经测试, 每个亮点特征参数计算及回波信号生成耗时约为2 ms。若软件采用顺序流程将无法保证运算实时性。为此, 对亮点回波信号处理软件进行模块化设计, 其模块组成如图4所示。
为保证运算实时性, 进行如下工作:
1) 在软件模块设计基础上, 根据模块关系耦合度完成功能划分, 并结合DSP产品特性对软件进行CPU运算分配以提高仿真系统计算效率, 分配结果如图5所示。
2) 根据例程测试结果, 在不计算声线汇聚的情况下, 回波信号生成占整个仿真软件运算耗时的60%以上。
在回波信号生成算法设计时, 对式(1)和式(2)的数学模型进行优化, 通过提取循环不变量预计算的方式降低计算循环圈复杂度, 从而减少CPU运算总量, 以HFM算法为例, 其优化方式如下所示。
myPulseWidth=pulseWidth/freqCompressGene [myLPNum];
/*双曲线起始T在-(pulseWidth/2)处,还要考虑频率压缩影响。*/
startT = -0.00025 * myPulseWidth;
/*paramT0 = 1/ t0, t0= (pulseWidth / freqBand) * freqCenter。 */
paramT0= 2000.0 * freqBand / (myPulseWidth * freqCenter);
/*根据f(t)=K/(t0-t),令t=-pulseWidth/2,则f(t)= freqLow,可推知K。*/
paramK= freqLow * (1.0 / paramT0 + 0.00025 * myPulseWidth);
/*运算不变量提至循环外以减少运算量。*/
unchangedValue = 2.0 * PI * paramK;
valueT0=unchangedValue * log(1.0 + startT * paramT0);
halfDataNum=(int)(0.5 * myPulseWidth *

图4 信号生成软件模块组成
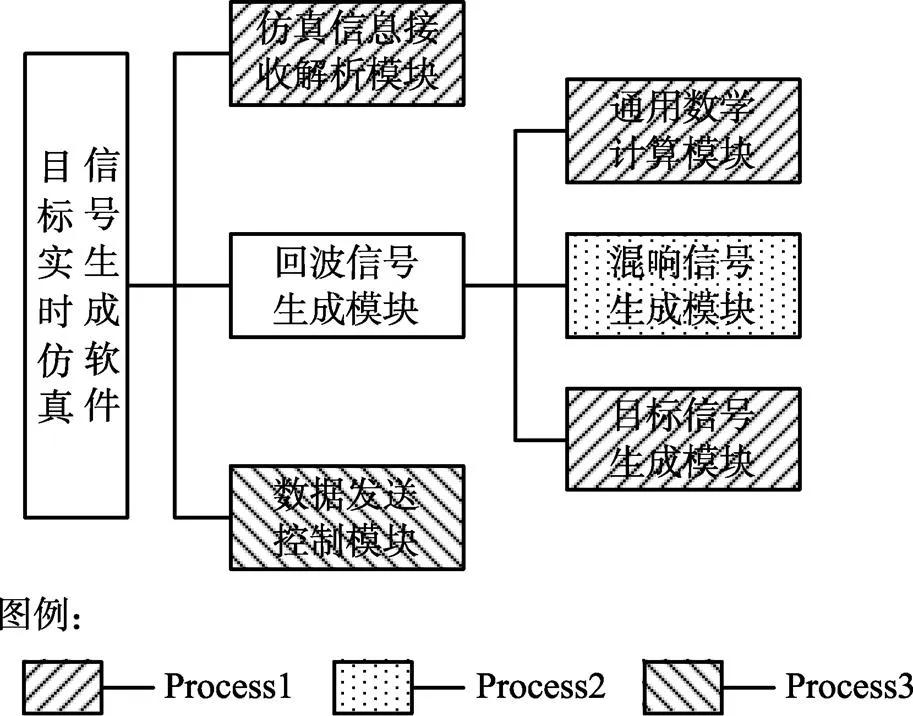
图5 软件模块CPU运算分配
250);
/*以下为循环计算生成目标回波信号*/
while(totalDataNum < (halfDataNum * 2))
{
……
}
3) 仿真步长为5 ms, 但目标回波时刻计算可以精确至采样率精度即1/250 000 = 4 us。为保证输出信号实时精度, 需要对每周期运算所得信号数据进行补零处理, 补零算法示意如图6所示。以HFM目标/干扰回波信号生成为例, 补零算法的软件实现如下所示。

图6 补零算法示意图
zeroDataNum = (myLPParamResult[myLPNum] [myPulseNum]. timeToTor - (int)(myLPParamResult[myLPNum][myPulseNum].timeToTor / 5) * 5) * 250;
if(PadZeroOver == DISABLE)
{
/*将每脉冲中相对于5ms整点时刻没有信号输出的部分填充为0。*/
for(signalNum = 0; signalNum < zeroData-
Num; signalNum++)
{
LPWaveSignalN[myLPNum * 240 * 250 +
signalNum] = 0.0;
PadZeroOver = ENABLE;
}
}
以上软件算法及结构的优化设计, 提高了回波信号生成模块的运算效率和正确性。除此外, 通用计算模块算法、软件逻辑控制、共享信息传递等若干方面也结合硬件环境进行了优化设计和试验验证, 进一步提高了整个仿真系统的实时可靠性。
4 系统构建及验证
在前述模型分析及算法和软件结构设计的基础上, 基于嵌入式硬件环境对鱼雷尺度多目标/干扰自导半实物仿真系统进行了构建。系统采用多CPU DSP板实现运算分配, 由多路DA板、多通道程控功率放大设备、水下换能器基阵、上位仿真控制计算机等组成, 系统组成示意如图7所示。
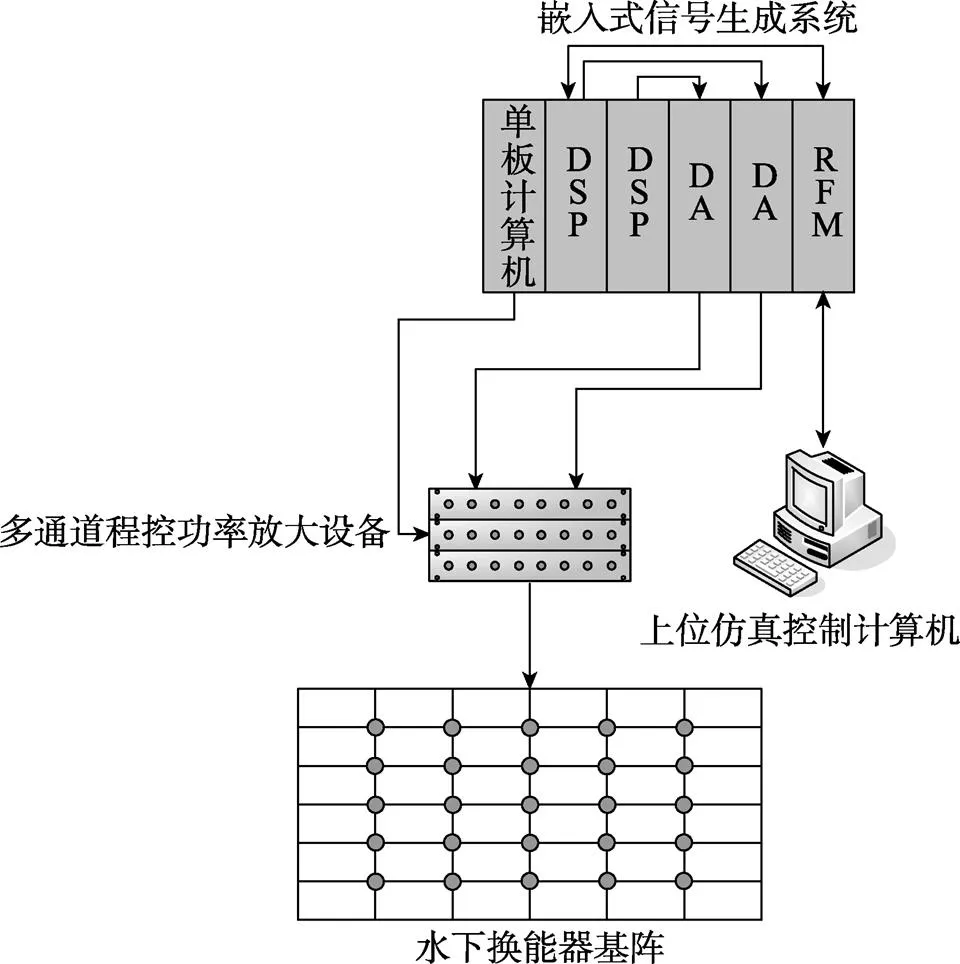
图7 仿真系统组成示意图
仿真软件使用遵循ANSI标准的 C语言实现, 操作系统平台为Vxworks, 集成开发运行环境使用tornado 2.2.1, 对系统所生成目标回波信号数据分析结果见图8~图10。
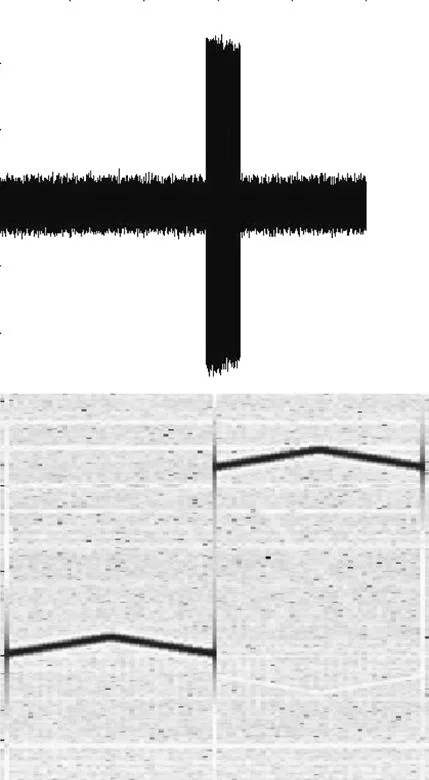
图8 单亮点线性调频(LFM)信号时域时频图

图9 单亮点HFM信号时域时频图
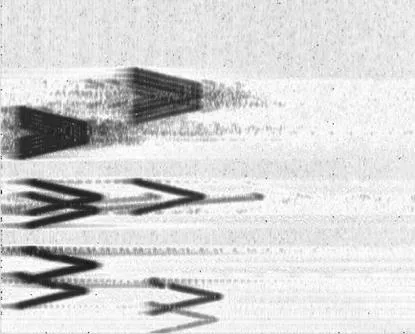
图10 多(尺度)目标时频图
数据短时傅立叶分析结果表明, 系统所实现多尺度目标/干扰仿真回波信号组成及特征参数均符合仿真上位机预设定信息, 信号连续、准确, 可以满足进一步科研及试验工作需要。
5 结束语
本文从数学模型及仿真软件设计优化角度, 对尺度多目标/干扰仿真方法进行了探讨, 并给出了基于嵌入式系统的鱼雷尺度多目标/干扰半实物仿真系统的构建方案, 结果表明, 系统可以满足半实物仿真需求。
为保证系统的实时性, 文中采用的是简化的目标遮蔽及亮点模型, 下一步的研究重点在于, 通过对目标亮点仿真算法的深入研究, 建立更精确的尺度目标亮点回波模型, 进行更优化的系统设计, 从而在保证实时性的前提下, 提高系统的仿真可信度。
[1] 褚福照, 黄建国, 张群飞, 等. 水声对抗声学仿真系统关键技术[J]. 声学技术, 2008, 27(6): 828-831. Chu Fu-zhao, Huang Jian-guo, Zhang Qun-fei, et al. Key Technology of Underwater Acoustical Warfare Simulation System[J]. Technical Acoustics, 2008, 27(6): 828-831.
[2] 董阳泽, 刘平香, 姚蓝. 水声对抗仿真系统研究的新思路及其应用[J]. 计算机工程与科学, 2005, 27(7): 88-90. Dong Yang-ze, Liu Ping-xiang, Yao Lan. New Ideal for the Underwater Acoustic Warfare Simulation System and Their Application[J]. Computer Engineering & Science, 2005, 27(7): 88-90.
[3] 崔怀林, 杨云川, 李志舜. 水下体目标回波空间方位特性仿真研究[J]. 系统仿真学报, 2006, 18(6): 1692-1695. Cui Huai-lin, Yang Yun-chuan, Li Zhi-shun. Research on Spatial Bearing Characteristics Simulation Method of Underwater Target Echo Based on Circular Arc Array[J]. Journal of System Simulation, 2006, 18(6): 1692-1695.
[4] 刘文远, 张静远, 吕阳, 等. 基于改进亮点模型的尺度目标建模技术[J]. 鱼雷技术, 2009, 17(4): 20-24. Liu Wen-yuan, Zhang Jing-yuan, LüYang, et al. Scaling Target Echo Modeling Technology Based on Modified Highlight Model[J]. Torpedo Technology, 2009, 17(4): 20-24.
[5] 刘文远, 赵金海, 宋永峰. 基于修正亮点模型的水下体目标建模技术[J]. 鱼雷技术, 2010, 18(5): 352-356. Liu Wen-yuan, Zhao Jin-hai, Song Yong-feng. Underwater Target Modeling Technology Based on Modified High- light Model[J]. Torpedo Technology, 2010, 18(5): 352- 356.
[6] 李志舜. 鱼雷自导信号与信息处理[M]. 西安: 西北工业大学出版社, 2004.
Design and Implementation of Hardware-in-the-loop Simulation Environment in Scaling Multi-Target and Multi-Jamming of Torpedo
ZHAOGang, YUEQing
(The 705 Research Institute, China Shipbuilding Industry Corporation, Xi′an 710075, China)
The underwater scaling multi-target identification has become an important index for evaluating acoustic countermeasure capability of modern torpedo homing system, but the relative sea trial circumstance is difficult to construct. Based on the analyses of target validity judgment and shelter calculation for scaling multi-target, a real-time signal generation algorithm is designed, and a hardware-in-the-loop simulation system is constructed. Simulation of scaling multi-target and multi-jamming environment is conducted with the system. The test results prove that the proposed system can meet the needs of relational simulation.
torpedo homing system; hardware-in-the-loop simulation; scaling multi-target and multi-jamming; simulation modeling; real-time signal generation algorithm
TJ630.34; TP391.9
A
1673-1948(2012)01-0063-06
2011-05-21;
2011-06-20.
赵 罡(1976-), 男, 硕士, 工程师, 研究方向为鱼雷制导半实物仿真.
(责任编辑: 许 妍)
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
舰船科学技术(2022年20期)2022-11-28
小哥白尼(军事科学)(2021年8期)2021-11-22
智能计算机与应用(2021年5期)2021-10-05
小哥白尼(军事科学)(2020年8期)2020-05-22
军事运筹与系统工程(2017年1期)2017-07-31
电子制作(2017年22期)2017-02-02
电子制作(2017年19期)2017-02-02
水下无人系统学报(2016年3期)2016-10-13
指挥控制与仿真(2015年1期)2015-01-10