基于电磁感应能量捕获技术的磁流变阻尼器研究
2012-06-05 10:20蒋学争胡红生
振动与冲击 2012年13期
蒋学争,胡红生,2,王 炅
(1.南京理工大学 机械工程学院,南京 210094;2.嘉兴学院 机电工程学院,嘉兴 314001)
磁流变液是一种智能材料,在外磁场作用下能在瞬间(毫秒级)从自由流动液体转变为半固体,呈现可控的屈服强度,而且该变化是可逆的[1]。磁流变阻尼器是以磁流变液为工作介质的半主动振动控制结构,与传统结构相比,磁流变减振器具有能耗低、响应快、结构简单、阻尼力连续顺逆可调以及方便与计算机控制结合等优点[3],已广泛应用于汽车工业、工程建筑、航空航天、武器系统等领域的振动控制,并取得了良好的控制效果[4-7]。
磁流变阻尼器工作时需要外部电源设备为其活塞线圈提供直流电能,以产生控制磁流变液的磁场。然而如果能够收集外界环境振动能给磁流变阻尼器供电,省去外加电源设备,实现磁流变减振器自供电,即可减小振动控制系统的体积、重量、成本,提高可靠性,从而促进磁流变减振技术进一步发展。目前在磁流变阻尼器自供电方面的研究较少,处于可行性论述阶段。其中Jung[8-9]研究了利用永磁式磁感应能量收集系统给磁流变阻尼器供电,进行了实验,取得了不错的控制效果,不过其研制的能量收集装置与磁流变阻尼器是分离的,未考虑将能量收集装置与磁流变阻尼器集合成整体;Choi等[10]和 Chao等[11]分别对磁流变阻尼器自供电方面开展了研究,但是均未考虑收集电能的传输问题,并且研制的磁流变阻尼器结构比较复杂,可靠性较低,应用成本高。
本文提出一种无需外部电源设备的新型磁流变阻尼器,它包括一个电磁感应能量捕获结构,能将外界振动能转换成适合磁流变阻尼器使用的稳压直流电,可在无外界电源情况下实现对振动的智能控制。相比上述研究,该电磁感应式自供能磁流变阻尼器具有结构简单、可靠性高的优点,同时对收集的电能进行整流调理,以适合磁流变阻尼器使用。首先论述了该新型磁流变阻尼器的结构特征,建立了电能收集的理论模型,然后对其捕获电能的能力进行了模拟仿真,最后在实验台架上对实际加工的实验器件原型进行了实验研究,实验结果表明:在外界振动条件下,该新型磁流变阻尼器可以在无需外界电能输入的情况下改变阻尼特性,从而可以实现对振动的无源智能控制。
1 新型磁流变阻尼器结构设计
在振动过程中,所设计的电磁感应式自供能磁流变阻尼器必须能收集振动能给自身供电,从而改变输出阻尼力特性,实现对振动的智能控制,因此设计时需要考虑三条设计准则:① 电磁感应能量捕获结构收集电能的能力(即收集的电能是否能驱动阻尼器线圈产生足够强的磁场,以改变磁流变液的阻尼特性);② 磁流变阻尼器是否可以实现对外界振动的智能控制(即阻尼器输出阻尼力是否受施加到线圈活塞上的电流控制);③ 结构复杂程度及加工难易度。其中电磁感应式能量捕获结构收集电能的能力是结构设计中主要考虑的问题。按上述原则设计的电磁感应式自供能磁流变减振器结构如图1所示,主要由磁流变阻尼器结构、电磁感应能量捕获结构、电能调理模块及相关连接件构成,其中连接件包括将电磁感应能量捕获结构的永磁体和磁流变阻尼器活塞连接在一起的中间连接杆,将磁流变液密封在磁流变阻尼器中的密封件等。

图1 电磁感应式自供能磁流变阻尼器Fig.1 EMI self-powered MR damper
由图1可见电磁感应能捕获结构的定子与磁流变阻尼器的缸筒连接在一起,并且在定子凹槽内缠绕着电磁线圈。实际工作时,在外界环境振动作用下,阻尼器的活塞杆在缸筒内做往复运动。同时由于电磁感应能量捕获结构的永磁体定子通过中间连接杆和磁流变阻尼器的活塞连接在一起,因此在振动力作用下,永磁体将随着阻尼器活塞杆一起运动,在定子内腔内做往复运动。由法拉第电磁感应定律可知,这将引起定子上缠绕的电磁线圈内部的磁通量变化,产生感应电动势。电能调理模块将产生的感应电动势转换成适合磁流变阻尼器使用的稳压直流电,并作用到磁流变阻尼器的活塞线圈上,产生控制磁流变液的磁场,改变磁流变阻尼器的阻尼特性,从而实现在无外接电源设备情况下智能控制振动的目标。
2 电能收集理论建模
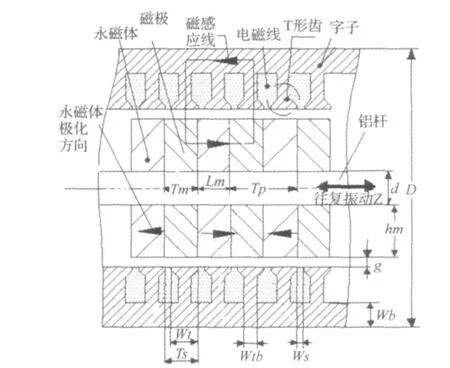
图2 电磁感应能量捕获内部结构Fig.2 Schematic of EMI energy harvesting device
在振动环境作用下,电磁感应能量捕获结构定子内的电磁线圈切割磁感应线产生电能,将一部分振动能转换成电能,其内部结构如图2所示,主要包括定子、永磁体、磁极、电磁线圈等。定子内部采用T形齿结构,并且在相邻T形齿的凹槽内绕制有电磁线圈,可最大化穿过磁力线,提高永磁体磁场的利用率,增加收集的电能。铝杆将圆环形永磁体和磁极连接在一起构成电磁感应能量捕获结构的动子,永磁体的磁极化方向为轴向方向,相邻永磁体的极化方向相反。永磁体采用NdFeB35制成;定子和磁极用电磁纯铁DT4制成,由于DT4的磁导率高、磁阻低,永磁体产生的磁力线容易穿过磁极、气隙和定子形成一个磁力线回路,提高磁场利用率。永磁体按照极化方向相反固定在一起,同磁极相互排斥,迫使磁感应线穿过气隙和定子形成磁力线回路。磁力线回路如图2所示,设计加工的电磁感应能量捕获结构动子由7块NdFeB35永磁体和8块DT4磁极构成,共7个磁力线回路。由于磁极区Tp的长度是T行齿绕线区Ts长度的两倍,因此工作时定子内共有14个电磁线圈处于电磁感应发电区。
当永磁体在定子内往复运动时,针对其中一个电磁线圈,其等效磁路模型如图3所示,其中:Frem表示永磁体的剩余磁动势;Rm表示永磁体自身的磁阻;R'm表示由于铝杆而引起的磁漏;Rp表示磁极的磁阻;Rg表示气隙的磁阻;Rc表示定子的磁阻。由于定子和磁极用高导磁材料DT4制成,磁阻很小,Rp和Rc可以忽略不记。又因材料铝不导磁,铝杆引起的磁漏非常小,R'm也可忽略不计。由法拉第电磁感应定律知,产生的感应电动势为线圈内磁通的变化率。因此在外界振动作用下,电磁感应能量捕获结构产生的电动势为:

图3 等效磁路模型Fig.3 Equivalent magnetic circuit

式中ψPM为永磁体的磁链,可由下式计算:

式中:N为电磁线圈的匝数;φg为定子和永磁体之间气隙的磁通量,而由磁路原理[12]知该磁通量可用下式计算:
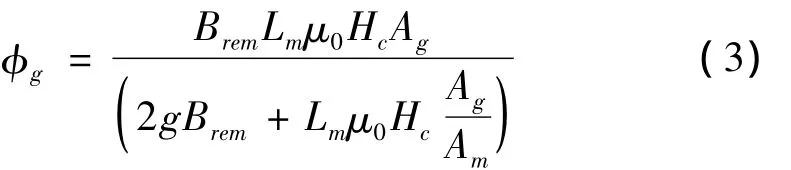
式中:μ0为真空磁导率;Brem为永磁体的剩余磁通密度;He为永磁体的磁矫顽力;Ag为气隙的截面积;Am为圆环形永磁体的截面积;g为气隙厚度。
化简式(1)、式(2)可得线圈切割磁感应线产生的感应电动势为:

由于磁力线从永磁体出来之后经过磁极、气隙、定子形成一个磁力线回路,而气隙磁通量为φg,故T形齿的厚度Wtb和定子壁厚Wb分别用下二式计算:

式中:Bmax为电磁纯铁DT4的饱和磁通密度;Lr为定子内壁的圆周长;Nsm为T形齿个数与永磁体个数的比值(本设计中Nsm=2)。
3 电能收集仿真及调理电路
3.1 电能收集仿真
由上文可知定子内电磁线圈产生的电动势非定值,其大小与方向随时间不断变化,为清楚观察其变化情况,利用MATLAB软件对其进行仿真计算,仿真条件为:永磁体在外界振动力作用下,沿轴线在定子内部做振幅为5mm和频率为2Hz(低频振动)的正弦振动。在此振动作用下,定子内电磁线圈产生的感应电动势如图4所示。由图4可见,在外界振动作用下,电磁感应能量捕获结构收集的电动势为交流电压,不能直接输入到磁流变阻尼器活塞线圈上产生控制磁场。由于发电时有14个电磁线圈参与工作,且每个电磁线圈参与发电的时间不同,因而造成图4中总电压曲线呈不规则曲线。为能控制磁流变阻尼器产生不同阻尼力,需要一个电能调理模块,将电磁感应能量捕获结构产生的交流电转换成适合磁流变阻尼器使用的稳压直流电。

图4 感应电动势Fig.4 Generated voltage
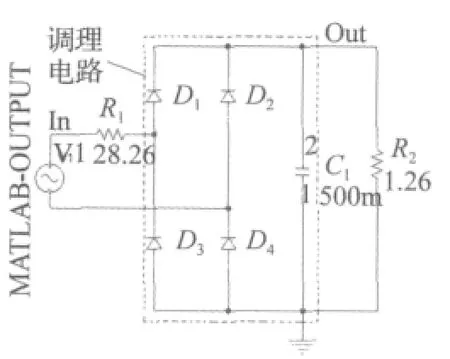
图5 电磁感应能量捕获调理电路Fig.5 EMI energy harvesting circuit
3.2 电能调理电路
根据电磁感应能量捕获结构收集的电压特点及相关结构参数,设计的调理电路如图5所示,该调理电路由一个直流整流电路和一个存储电容C1组成,直流整流电路用于将方向不断变化的感应电动势转换成方向不变的直流电压,存储电容用于存储从直流整流电路输出的电能,并通过电容充放电功能将其转换成适合磁流变阻尼器使用的稳压直流电。为验证调理电路的有效性,在电路仿真软件PSPICE中对设计的调理电路进行仿真(如图5),其中:电压输入V1为上文MATLAB电压仿真中输出的感应电动势,V1与时间的关系见图4;R1表示绕制在定子内电磁线圈的电阻值(28.26 Ω);R2表示磁流变阻尼器活塞线圈的电阻值(1.26 Ω)。在交流电压源V1的激励下,经过电能调理电路,实测得R2两端电压如图6所示。
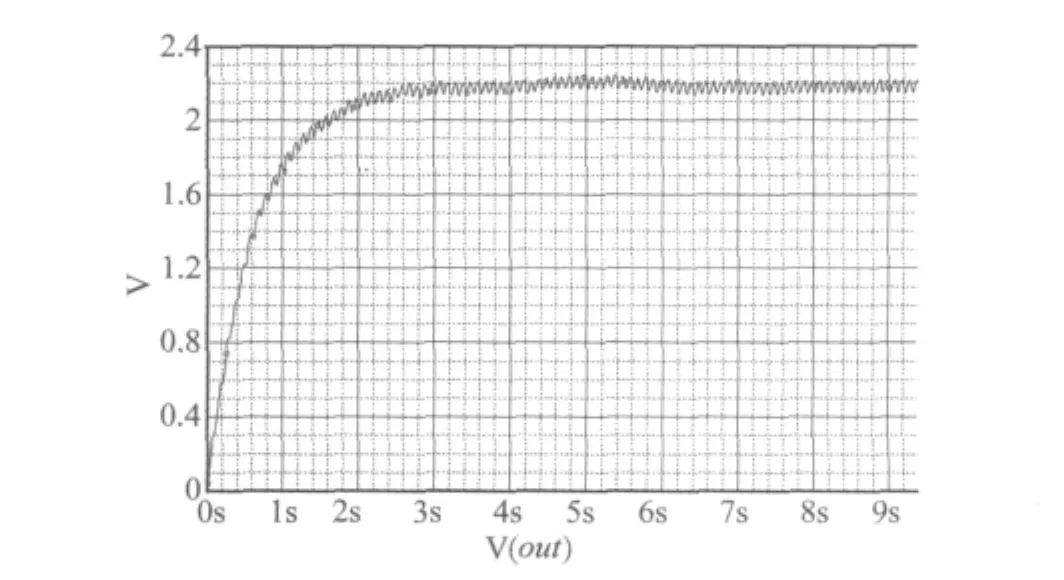
图6 调理电路输出电压Fig.6 Output voltage of EMI energy harvesting circuit
由图6可见,在振动刚开始3 s内R2两端电压从0 V 上升到2.1 V,并从第3 s开始保持在2.1 V 和2.2 V之间,其变化幅度只有0.1 V左右,基本上处于稳压状态,能在阻尼器活塞线圈中产生1.67 A左右的直流电。由此可见,设计的电能调理电路可以将电磁感应能量捕获结构收集的交流电压转换成适合磁流变阻尼器使用的稳压直流电压。
4 实验
为验证设计加工的电磁感应自供能磁流变阻尼器振动控制能力,在实验台架上对设计加工的器件原型进行实验研究。实验原理如图7所示,激振台采用PA-20-Z型电液伺服振动测试台,EMI磁流变减振器活塞杆固定在实验台架的上悬梁上,底部连接在实验台架的激振头上,实验时激振头带动活塞杆一起运动。实验中,磁流变阻尼器输出的阻尼力由固定在激振头上的拉压力传感器(HDW207,福建莆田)测量,位移和速度由位移传感器(LWH150,Novotechnik)测量,实验台架如图8所示。实验条件与上文电能收集仿真时设定的振动条件相同,从而方便与仿真结果比较。
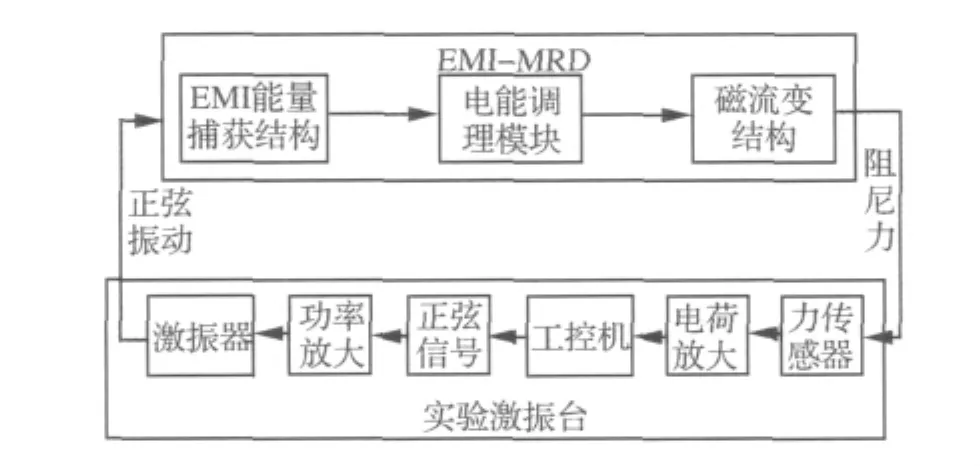
图7 实验原理图Fig.7 Schematic of experimental setup
首先对磁流变阻尼器自身阻尼特性进行实验验证,检验设计的磁流变阻尼器是否可以实现对外界振动的智能控制。不同电流激励下,磁流变阻尼器输出的阻尼力如图9所示。图9由里到外依次显示了0 A至1.4 A电流输入时的阻尼力曲线,可见随着外界输入电流的增加,阻尼器输出阻尼力的峰值逐渐增大,由100 N增加大约到1100 N。表明所设计的磁流变阻尼器可以达到预先设定的振动控制目标,可以通过控制输入电流达到对外界振动的智能控制。当外部输入1.2 A和1.4 A 电流时,磁流变阻尼器输出的两条阻尼力曲线基本重合。这表明磁流变阻尼器的饱和输入电流为1.4 A,即在输入1.4 A固定电流情况下,磁流变液已达到自身的剪切屈服强度,此时阻尼器输出阻尼力将不在随电流的增大而增大。

图8 实验台架Fig.8 Photo of experimental rig
其次为验证电磁感应能量捕获结构收集电能的能力,其收集的电能是否足够驱动活塞线圈产生控制磁场,在相同振动条件下(即频率2Hz/振幅5mm)对电磁感应式自供电磁流变阻尼器电能捕获能力和输出阻尼力进行实验研究,结果分别如图10和图11所示。
利用示波器测量EMI结构收集的电能(图10),收集的电压经过调理电路后变为2V左右平稳电压,可在阻尼器线圈中产生约1.58 A直流电流,与图4仿真所得的电压曲线相似。比较图10和图6可见,实际采集的平稳电压值比仿真所得值稍小,是由于实际测量系统内阻造成的。将收集到的电压能输入到磁流变阻尼器的活塞中(ON状态),此时磁流变阻尼器输出的阻尼力曲线如图11所示。由图11可见,在无外部电能输入的条件下,新型电磁感应式自供能磁流变阻尼器的输出阻尼力远大于普通无外电流输入的磁流变阻尼器,并且基本与饱和激励电流(即1.4 A)输入情况下的阻尼力曲线重合。其原因为在此振动条件下,电磁感应能量捕获结构收集的电能可在阻尼器活塞线圈中产生1.58 A左右的电流,从而使阻尼器输出阻尼力达到最大。这表明在2Hz/5mm低频正弦振动作用下,该电磁感应式自供能磁流变阻尼器能实现电能自供的目标,可在无外界电能输入情况下改变其阻尼特性,实现对外界振动的智能控制。

图9 不同电流下输出阻尼力曲线Fig.9 Output damping force under different current

图10 捕获电能Fig.10 Harvested voltage by EMI

图11 不同阻尼力对比曲线Fig.11 The comparison of different output damping force
5 结论
本文提出的一种新型电磁感应式自供能磁流变阻尼器,相比于常规需要外部电源输入的同类器件,该新型磁流变阻尼器可在无外部电源情况下实现对振动的智能控制。由于其包含电磁感应能量结构,可将外部振动环境的一部分振动能转化成电能,并通过电能调理电路将收集的电能转换成适合磁流变阻尼器使用的直流电。通过理论分析,建立收集电能的理论模型,构建电能调理电路,并对其进行仿真研究。为对理论研究进行实验验证,设计加工了一个电磁感应式自供能磁流变阻尼器实验原型进行了实验研究,结果表明在外界振动作用下该电磁感应式自供能磁流变阻尼器可以捕获足够自身使用的电能,实现对振动的无源智能控制。由于无需外部电源,大大地减小磁流变振动控制系统的体积、重量,提高系统的可靠性,降低成本,从而推动磁流变减振技术的进一步发展。
[1]Kuzhir P,Lopez L M T,Bossis G.Abrupt contraction flow of magnetorheological fluids[J].Physics of Fluids,2009:1-13.
[2]Wang H J,Tian A L,Tang Q,et al.Research on rheological property of magnetorheological fluid[C].3rdInternation Symp.On Advanced Optical Manufac.And Testing Tech.Proc.of SPIE,2007,6722(672230):1-5.
[3]Boada M J L,Calvo J,Boada B L,et al.Modeling of a magnetorheological damper by recursive lazy learning[J].Int.J.Non-Linear Mech.,2009,3:1 -7.
[4]Sevki C,Tahsin E.Modeling and testing of a fieldcontrollable magnetorheological fluid damper [J].International Journal of Mechanical Sciences,2010,5:1036-1046.
[5]Felix-Herran L,Mehdi D,Soto R,et al.Control of a semiactive suspension with a magnetorheological damper modeled via takagi-sugeno[C].18thMediterranean Conference on Control & Automation,Congress Palace Hotel,Marrakech,Morocco,New York:2010 IEEE:1265-1270.
[6]Potter J N,Neild S A,Wagg D J.Quasi-active suspension design using magnetorheological dampers[J].Journal of Sound and Vibration,330(10):2201-2219.
[7]Cho S W,Jo J S,Jang J E,et al.A smart passive damping system for stay cables[J].Proc.of SPIE,2006,6174:1 -6.
[8]Cho S W,Jung H J,Lee L W.Smart passive system based on magnetorheologicaldamper[J]. SmartMaterials and Structures,2005,15(4):707 -714.
[9]Choi K M,Jung H J,Cho S W,et al.Application of smart passive damping system using MR damper to highway bridge structure[J].Journal of Mechanical Science and Technology,2007,24(7):870-874.
[10]Choi Y T,Wereley N M.Self-powered magnetorhe-ological dampers[J].Journal of Vibration and Acoustics,2009,131(4):44-50.
[11]Chen C, Liao W H. A self-powered, self-sensing magnetorheological damper[C].New York:Proceedings of the 2010 IEEE.International Conference on Mechatronica and Automation,2010:1364-1369.
[12]DuBois H.The magnetic circuit in theory and practice[M].London:Longmans,1896.
猜你喜欢
疯狂英语·初中天地(2022年9期)2022-08-29
电机与控制学报(2022年5期)2022-06-23
大电机技术(2022年1期)2022-03-16
计算机仿真(2022年1期)2022-03-01
微特电机(2020年11期)2020-12-30
北京理工大学学报(2020年11期)2020-12-15
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
中学生数理化(高中版.高考理化)(2019年3期)2019-04-25
电子制作(2018年14期)2018-08-21
振动、测试与诊断(2017年5期)2017-11-07