目标跟踪性能的仿真研究
2012-06-14 01:37孙永江金华松于建成
无线电工程 2012年2期
孙永江,金华松,于建成
(中国卫星海上测控部,江苏江阴214400)
0 引言
在跟踪雷达中,伺服系统控制天线实现对目标的搜索、捕获和控制,所以伺服系统必须具有良好的快速性能和跟踪性能。伺服系统性能指标主要包括:角跟踪性能(天线的运动范围、速度和加速度)、捕获时间、带宽和跟踪精度。各性能指标之间是相互联系、相互制约的,需要不断调试才能达到最优的效果。系统以某船载跟踪雷达伺服系统作为对象,通过改变控制输入模拟机动目标,对跟踪雷达伺服系统进行仿真。以定量的描述将带宽、跟踪性能和跟踪精度有机地结合起来。
1 伺服系统指标分析
1.1 带宽
闭环幅频特性下降到频率为零时的分贝值以下3 dB时,对应的频率ωb称为带宽频率。即

对于I型和I型以上的系统,表达式为:

系统对于高于频率ωb的输入信号衰减很大,只允许低于频率ωb的输入很好通过。系统幅频特性不低于-3 dB对应的频率范围0<ω<ωb成为系统带宽。
带宽是频率域中的一项重要指标。带宽大,表明系统能通过较宽的频率的输入;带宽窄,系统只能通过较窄频率的输入[3,4]。因此,带宽大的系统,一方面重现输入信号的能力强,另一方面,抑制输入端高频噪声的能力就弱。将这一原理用在雷达跟踪系统中,当目标比较远时,其速度小,信噪比低,一个较窄的伺服通带可在接收机热噪声的影响最小的同时,以适当小的动态滞后跟踪目标。当目标较近时,信号强,压住了接收机的噪声,适当地增加宽带,可以显著减小滞后误差,但同时又使随机误差增加不多,使系统总误差最小。
1.2 伺服系统跟踪精度
伺服系统跟踪精度包含2个方面:① 系统误差指重复测试均保持同一数值或按某种规律变化的误差分量。主要包括:动态滞后、传递误差、伺服放大器零点漂移和死区;②随机误差是指一种随机的、不规则的、反复多次测量后其大小和符号均不相同的误差分量。主要包括传动误差、伺服放大器零漂和噪声。根据雷达精度要求,分保精度跟踪、稳定跟踪和跟踪不丢失3种跟踪类型。
2 伺服系统仿真
2.1 建立系统模型
采用某船载雷达伺服系统作为仿真模型。为了隔离船摇,自跟踪环路中内嵌了陀螺稳定环路[5]。
跟踪位置环调节器传递函数为:

陀螺稳定环闭环传递函数为:

式中,Kvl为陀螺稳定环闭环增益;τvl为陀螺稳定环闭环等效时常数。
2.2 改变校正参数确立不同的带宽
在仿真过程中,通过选取不同的校正参数来模拟伺服系统不同位置回路带宽。建立系统仿真模型[6~8],如图1所示。根据仿真结果可以得到位置调节器校正参数和带宽之间的关系。
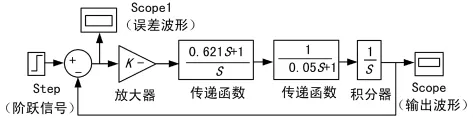
图1 自跟踪环仿真模型
2.3 正弦函数控制输入仿真
取控制信号为正弦函数作为目标飞行器的飞行轨迹:

则目标的速度特性和加速度特性为:

将图1中输入信号输入正弦信号,在MATLAB中进行仿真。通过选择不同的频率ω来实现不同的跟踪性能要求。然后根据频率可以算出在不同情况下的最大速度和加速度值,结果如表1所示。下面以位置环路带宽为ωb=1.8 Hz,保精度跟踪来进行说明。选择目标频率 ω =0.65,则=6.5°/s,=4.225°/s2。其仿真结果如图2所示。
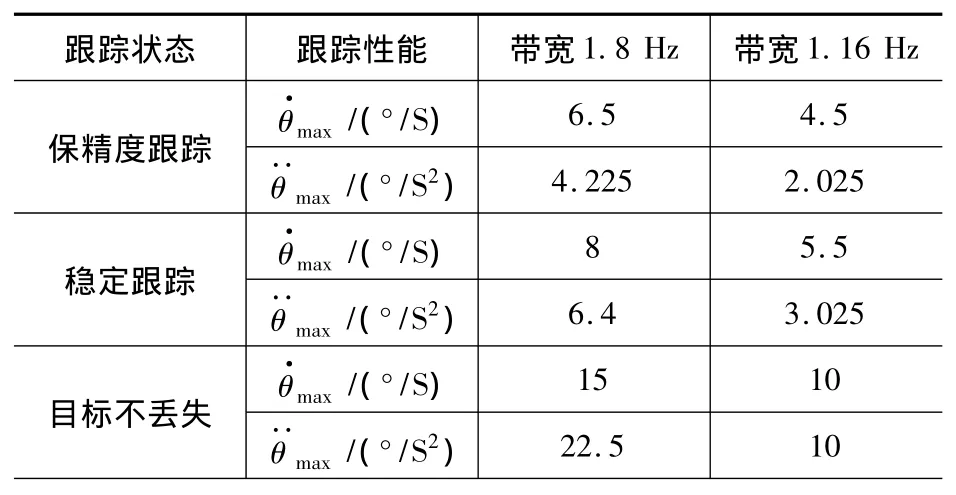
表1 伺服带宽对机动目标跟踪性能表

图2 位置回路带宽为1.8 Hz时保精度跟踪仿真曲线
2.4 正弦加斜波函数控制信号输入仿真
取控制信号为正弦加斜波函数作为机动目标的飞行轨迹,

则目标的速度特性和加速度特性为:

将图1中输入信号改成正弦信号加斜波信号,在MATLAB中进行仿真。通过选择不同的频率ω来实现不同的跟踪性能要求。然后根据频率可以算出在不同情况下的最大速度和加速度值,结果如表2所示。下面以位置环路带宽为ωb=1.8、保精度跟踪来进行说明。选择目标频率ω=0.65,则=21.5°/s,=4.225°/s2。其仿真结果如图 3所示。
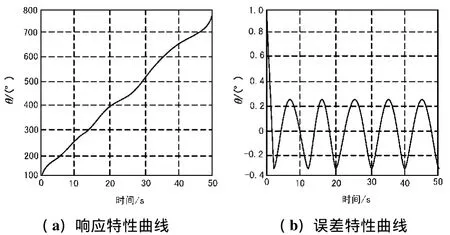
图3 位置回路带宽为1.8 Hz时保精度跟踪仿真曲线

表2 伺服带宽对机动目标跟踪性能表
3 仿真结果分析
从仿真结果可以看出,带宽直接制约着系统的跟踪性能。带宽愈宽,系统适应目标飞行器变化的能力愈强。上面所列的输入信号为正弦信号以及正弦信号加斜波信号2种情况只是2种特例。对于用复杂的数学模型建立的真实目标的仿真,结论同样适用;另外,一般跟踪系统都设计成二阶系统。对于速度恒定的目标飞行器可以实现无静差跟踪,即系统的跟随误差为零。
4 结束语
通过MATLAB仿真,将伺服系统带宽和跟随能力有机结合起来,给出了在不同带宽条件下满足多种跟踪误差条件的目标速度和加速度值。对跟踪雷达伺服系统的性能指标调试、实时变参数控制乃至伺服结构设计、总体指标分配等都有一定的指导作用。
[1]陈伯时.电力拖动自动控制系统[M].北京:机械工业出版社,1999:50-63.
[2]魏敬春.统一微波测控系统测角分系统讲义[M].西安:信息产业部三十九所,2002:30-70.
[3]魏敬春.船载微波统一测控系统测角分系统改造方案[M].陕西:信息产业部三十九所,2002:30-55.
[4]段海滨,于秀芬,王道波,等.内模PID鲁棒控制的飞行仿真伺服系统设计[J].中国空间科学技术,2004(6):1-5.
[5]陈行勇,刘永祥,姜卫东.雷达目标微动分辨[J].系统工程与电子技术,2007,29(3):361 -364.
[6]KELLY E J.The Radar Measurement of Range,Velocity and Acceleration [J].IRE Trans.on Military Electronics,1999,5(2):51-57.
[7]沈 辉.精通SIMULINK系统仿真与控制[M].北京:北京大学出版社,2003:20-80.
[8]丛 敏,金善良,罗 翌.自动目标识别技术的发展现状及其应用[J].飞航导弹,1999(12):1-9.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
新高考·高三数学(2022年3期)2022-04-28
电子制作(2019年15期)2019-08-27
小学生学习指导(低年级)(2018年12期)2018-12-29
中学生数理化·高一版(2018年6期)2018-07-09
理科考试研究·高中(2017年7期)2017-11-04
制造技术与机床(2017年3期)2017-06-23
中学生数理化·高二版(2016年9期)2016-05-14
北京航空航天大学学报(2016年4期)2016-02-27
火控雷达技术(2016年3期)2016-02-06