常用温度控制算法的分析与研究
2012-06-16 08:09吕萍
科技视界 2012年28期
吕 萍
(河北联合大学研究生学院 河北 唐山 063100)
目前国内外工业生产过程中,温度控制是很多生产过程中一个重要的参数指标,人们对其控制系统的改进和控制算法的研究一直没有停息过,温度的优化控制对于提高工作效率和质量、节省能源有着极其重要的意义。
1 几种常用温度控制算法研究
一般的工业温度控制都可近似为纯滞后控制。根据热力学原理,可以得到以下温度控制系统传递函数,其近似表达式为:

式中Gp(S)为被控对象中不含纯滞后的部分。其闭环传递函数为:

由于特征方程中含有e-τs项,这对控制系统稳定性及其不利,若e-τs足够大,系统就很难稳定。
针对本文的研究对象,分析研究几种常规的控制算法。
1.1 PID控制算法
PID在温度控制中是一种成熟的技术,它具有结构简单,易于理解、实现的特点。PID控制具有比例,积分、微分三种调节作用,它根据给定值rin(t)与实际输出值yout(k)构成控制偏差:

式中,kp为比例系数;TI为积分时间常数;TD为微分时间常数。
kp,TI,TD的改变对控制作用影响很大。如果能将三个参数达到很好的系数组合,那么控制效果会比较理想。但是对于实际工业生产过程而言,系数的选取具有一定的难度。
1.2 Dahlin控制算法
美国IBM公司的大林(Dahlin)提出了一种针对工业控制过程中纯滞后特点且不同于常规PID控制的新型算法,也就是大林控制算法。该方法克服纯滞后极其有效,其特点是,把期望的闭环响应设计成为一阶惯性加纯滞后,然后反过来推出满足该闭环响应的控制器。但是大林算法的参数也很难确定,由于工业生产过程被控对象的时变性和不确定性,使得该算法只能方便对模型参数确定的系统进行有效的控制。其结构如图所示:

图1 单闭环系统原理图
对于上图:GC(Z)为数字控制器,GP(Z)为被控对象,则闭环传递函数为:

如果能够事先设定系统的闭环响应 ,则可得控制器。大林指出,通常的期望闭环响应是一阶惯性加纯延迟环节的形式,其延迟时间等于对象的纯延迟时间τ:

式中:TΦ为闭环系统得时间常数,由此得到的控制规律称为大林控制算法。
1.3 Smith预估控制
Smith控制是建立在模型基础上的一种控制算法,其原理为:与PID控制器并接一个Smith预估器作为补偿环节。它能很好的对纯滞后系统进行有效控制。其特点是通过预估对象的动态特性,用一个预估模型来进行时间滞后的补偿,使被延迟了τ的被调量超前反馈到控制量,进而控制提前动作,从而减小超调量并加速调节过程。

图2 Simith预估控制框图
不加补偿环节时,系统的闭环传递函数为:

若纯滞后时间τ足够大,系统将不稳定。
加入Smith补偿环节后,系统的闭环传递函数为

可以看出,加入补偿环节后,纯滞后的影响被消除。
1.4 模糊控制算法
模糊控制是一种以模糊数学、模糊语言和模糊逻辑为理论基础,采用计算机控制技术的闭环非线性控制系统。
与常规控制系统相比模糊控制具有以下优点:
①不依赖系统精确数学模型,适用复杂系统和模糊性对象,控制结构简单,鲁棒性好;
②具有智能型,模糊规则可通过学习不断更新;
③兼具数字控制的精确性和软件编程柔软性的特点。
但是,模糊控制算法主要缺陷是,信息的模糊处理会导致系统控制精度的降低和动态品质变差,并且模糊控制无法定义控制目标,参数的选择多采用试凑法,对复杂系统的控制的实现有一定的难度。
1.5 模糊神经网络控制系统
模糊系统和神经网络的融合方式是为了构造出各类模糊神经元及模糊神经网络,以其作为模糊信息处理单元来实现模糊信息的自动化处理。
系统主要包括模糊神经网络控制器,被控对象的神经网络辨识器及被控对象。控制器的输入为偏差e和偏差变化率de,输出为控制量u′(k),u(k)′乘以比例因子得到被控对象 u(k),神经网络辨识器用来逼近被控对象的输出,由其提供被控对象输入对输出的倒数信息。
2 仿真结果
本文在某厂电炉温度控制的基础上,对上述控制方法分别加以阶跃信号,采样时间为0.5秒,设定温度为80℃,得到响应曲线如图所示。
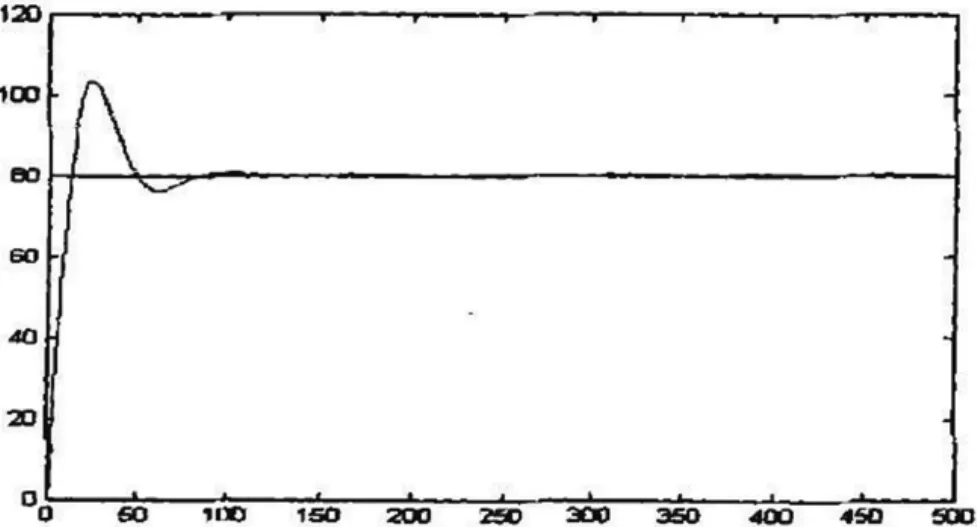
图3 PID控制算法

图4 大林算法

图5 Smith预估控制算法

图6 模糊控制算法

图7 模糊神经网络控制算法
通过比较可以看出,PID算法有较大的超调量;模糊控制算法比常规PID超调量小,但是调节时间较长;大林算法可避免超调,但是调节时间同时增大且产生静态误差;Smith预估控制不产生超调,但是调节时间长,具有较好的稳态性和动态性;模糊神经网络控制效果比较好,但是调节时间太长。
3 结论
通过以上分析和仿真,可以清楚地看到不同的控制算法都有其不同的特点,在实际应用当中,由于实际对象参数的变化,单一一种控制器往往不能应对所出现的各种情况,综合以上几种控制器优缺点,模糊神经网络控制方法对系统控制有较好的控制效果。相信如能进一步加以改进,会具有更强的可行性和实用性。
[1]金耀初,蒋静坪.最优模糊控制的两种设计方法[N].中国电机工程学报.1996,16(3):201-204.
[2]张曾科.模糊数学在自动化技术中的应用[M].北京:清华大学出版社,1997:30-37.
[3]俞金寿.工业过程先进控制[M].北京:中国石化出版社,2002:366-390.
[4]刘兴堂.应用自适应控制[M].西安:西北工业大学出版社,2003:127-136.
[5]张际先.神经网络及其在工程中的应用[M].北京:机械工业出版社,1996:77-98.
猜你喜欢
小学生优秀作文(低年级)(2021年10期)2021-11-24
环球时报(2020-08-11)2020-08-11
机电工程技术(2018年10期)2018-12-06
制造技术与机床(2017年6期)2018-01-19
作文大王·低年级(2017年1期)2017-02-16
电源技术(2015年9期)2015-06-05
爆笑show(2015年3期)2015-05-08
组合机床与自动化加工技术(2014年12期)2014-03-01
上海金属(2013年4期)2013-12-20