
恒压供水泵站节能系统的仿人智能控制策略
2012-07-09 02:32范磊
兵器装备工程学报 2012年10期
范 磊
(重庆建工集团第二建设有限公司,重庆 400030)
水是生命之源,直接关系到人们的生活质量。供水系统是基础设施,但是在供水设施建设中,往往重硬件,比如重管网管线、供水泵站的硬件建设,而对软件功能重视不够,导致供水质量不尽人意。典型的例子是供水流量难以调节,供水质量差,时大时小,能源消耗大。在现代供水泵站建设中既要节能,又要保证供水稳定性,以下结合工程实践讨论恒压供水泵站节能系统的仿人智能控制策略相关问题。
1 控制论特性及存在问题
供水系统是一个复杂系统,其供水过程是一个复杂的不确定性过程。比如用户用水最突出的特点是随机的,很难预料哪个社区、哪个用户需要用水?什么时候用水?用水数量是多少?等等。就供水系统而言,以宏观角度考虑,供水过程往往表现出以下几个方面的控制论特性:系统参数的未知性、时变性、随机性和分散性;过程严重的非线性;过程变量间的关联性;环境干扰的未知性、多样性和随机性。这些特性导致采用传统控制方法很难达到人们期望的控制目标。因其属于不确定性复杂过程,难以建立过程模型,传统控制方法是无能为力的。
存在问题主要表现:①传统控制策略(例如PID 控制)是基于数学模型的控制,即认为控制、过程及干扰的模型是已知的或者是通过辩识可以得到的。但供水过程具有不确定性,对于“未知”、不确定、或者知之甚少的控制问题,用传统方法难以建模,因而难以对供水过程实施有效的控制。②供水过程具有高度的非线性,采用传统控制方法会由于过分复杂的非线性处理而难以应用。③传统控制主要采用微分方程、状态方程以及各种数学变换作为研究工具,其本质是一种数值计算方法,属定量控制范畴,要求控制问题的结构化程度高,易于用定量数学方法进行描述或建模,供水过程控制是半结构化与非结构化控制问题。④过程的复杂性包括通常意义下的操作对象和所处的环境,由于关系错综复杂,各要素的高度耦合,互相制约,外部环境又极其复杂,传统控制缺乏有效的解决方法。⑤基于数学模型的控制存在鲁棒性与灵敏度之间的矛盾,复杂供水过程则可能由于条件的改变使整个控制系统崩溃,如压力过大导致管网崩溃,即系统的可靠性问题。
无论采用什么样的控制手段,供水系统必须满足用户用水需求,因此供水系统的控制目标是在满足用户对供水要求的前提下,尽可能减少环境污染和节约能源。上述存在问题决定了用传统方法是难以对供水过程进行有效控制的,必须探索更有效的节约能源策略与控制方法。
2 基于变频调速的节能技术
供水是通过供水泵站的电动机驱动水泵执行的,因此如何控制电动机的运行模式是节能的关键,按照电机理论,电机转速公式为

式中:n 是电动机的实际转速;f 为供电电源频率;S 是转差率;P 为电动机的极对数。公式表明电机转速与频率近似成正比,改变供电电源频率即可平滑地调节电机转速,水泵属平方转矩负载,其电动机转速n、水流量Q、水压力H 与电动机轴功率P 具有如下关系:Q ∝n,H ∝n2,P ∝n3,即流量与转速成正比,压力与转速平方成正比,轴功率与转速立方成正比。改变电动机转速就可方便地实现水流量控制,有效地确保供水系统满足用户恒压供水的稳定性期望。采用变频调速不仅调节方便,其节能效果也很明显。设电动机额定功率为PN,额定转速为nN,转速为n 时实际输出功率为P,则节能(用功率表示)ΔP 可以表示为:式中如取n/nN= 2/3,则ΔP=0.67PN,即节能效果在理想情况下可达到67%,可见只要采用变频调速技术,其节能效果是很显著的。
在供水系统中使用变频调速技术(变频器)还有以下优点:①可方便地实现电机软起动、自由停车。电机均通过变频器或软起动从0 ~50 Hz 作缓慢加速起动,减少了机泵因突然高速起动所带来的影响,减少了直接起动时起动电流对电网的冲击。②可提高功率因数,改善电动机电源质量,保证电动机的功率与实际负荷相匹配,达到系统节能运行的目的。③可消除机泵的喘振现象,使机泵运行处于最佳工况状态。④可方便地实现自动控制,使被调节量得到更平稳的调节,增强了系统的稳定性和可靠性。
3 恒压供水的控制策略选择
控制策略选取与被控过程特性是紧密相关的,错误或不当的控制策略往往导致控制效果极差,甚至系统失控。传统控制PID 与近代控制理论算法,无论是状态空间法,还是基于I/O 描述的黑箱法,精确的数学描述是它分析与设计系统的基础,对不确定性的复杂供水过程显然不具备上述条件,因此不应列为选取的控制策略。
神经网络控制的关键是选择一个合适的神经网络模型,并对其进行训练与学习,直至达到符合要求为止,即寻找最优的神经网络结构与权值。然而,神经网络的学习,需要一定的实验样本,这些实验样本也必须从已知经验和事先的实验中获得。同时,神经网络的训练与学习过程,有时较为复杂,需要运行成千上万次才能获得最佳结构。有时获得的是一个局部最优解,而不是全局最优解,因方法的局限性,更重要的是不确定性本身无规律可言,因此神经网络控制策略对所讨论的过程难以实现有效的控制。
专家控制系统是以知识为基础,在某一专门领域企图模拟人们思想行为的一组计算机程序,能处理各种定性的、定量的、精确的与模糊的信息,因此可根据对被控过程的经验和知识获取情况,采取不同的描述形式,以便更多地反映过程特性,为控制提供控制策略和控制模态。但由于特征信息的采集、特征信息的表达以及完备知识库的建立实现难度大,所以,专家系统也不一定是一个好的选择。
实际工程中,一个非常熟练的操作人员,能凭借自己丰富的实践经验,通过对现场各种现象的判断取得较满意的控制效果。如果将凭经验所采取的措施转变成相应的控制规则,并且研制一个控制器来代替这些规则,从而也可实现对复杂工业过程的控制。实践证明,以模糊控制理论为基础的模糊控制器(FC)能用IF condition THEN action 语句完成多种复杂的控制任务。但是对于不确定性如何处理还处于探索阶段,并不能作为选择控制策略的依据。
值得注意的是仿人智能控制(HSIC)在大量实际工程中获得了成功应用。HSIC 总结人的控制经验,模仿人的控制思想和行为,以产生式规则描述其在控制方面的启发与直觉推理行为,并在结构和功能上具有以下基本特征:分层递阶的信息处理和决策机构(高阶产生式系统结构);在线的特征识别和特征记忆;开闭环控制结合和定性决策与定量控制结合的多模态控制;启发式和直觉推理逻辑的应用。由于HSIC 的基本特点是模仿控制专家的控制行为,它的控制算法是多模态控制的,是多种模态控制间的相互交替使用,该算法完美地协调了控制系统中诸多相互矛盾的控制品质的要求,更符合恒压供水过程应用的工程实践,与上述各种控制策略相比,有其独特的优势。因此供水过程采用基于仿人智能的控制策略是一种较理智的选择。
4 控制模型与控制算法
4.1 控制模型
基于仿人智能的控制融合控制集知识模型与机理控制模型于一体,是一种广义控制模型,如图1 所示。该模型对被控过程的先验知识要求甚少,只要知道系统误差e 及其变化率就可对过程实施有效控制,图2 是广义控制模型结构,其中系统误差、误差变化率以及时间t 构成了控制问题求解的信息空间,误差e(t)= r(t)– y(t),r(t)是过程输入,y(t)是过程输出。基于广义控制模型的控制器(HSIC)根据系统误差的大小、方向及其变化趁势即可作出相应的决策,选择相应控制模式进行控制,其优势在于不需要事前知道或在线辨识被控过程的精确数学模型,就能实现速度快、精度度高的控制,且具有极强的鲁棒性。
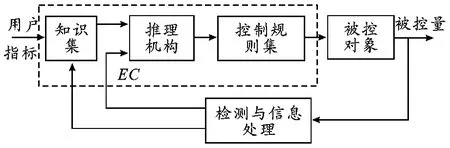
图1 基于仿人智能的广义控制模型

图2 广义控制模型结构
基于仿人智能的广义控制模型将仿人智能控制技术和专家系统技术融为一体,对环境变化有很强的自适应能力,便于对控制系统结构进行简化,把知识库、推理机构和控制规则融入一个仿人智能控制器中,借助开闭环控制相结合的基本特征,可实现灵活的多模态控制,增强了判断和推理的能力,可采用产生式规则建立供水过程的知识集,基本结构是:If〈condition〉Then〈action〉。突出优点是模块性好,产生式规则之间无直接联系,而且其自然性好,每条规则可独立增删、修改,适合于供水过程控制的特点。
4.2 控制算法
供水过程的基本控制算法可以概括为2 种动态特征模式:①若e·˙e≥0 且e+˙e≠0,则采用比例-半微分控制;②若e·˙e≤0 或e=˙e=0,则采用半开环控制。改进的仿人智能控制器的原型算法为

式中:u 为控制输出;Kp为比例系数;k 为抑制系数;e 为系统误差;˙e 为系统误差的变化率;em,j为误差第i 次峰值。控制规则可概括与表1。
受胎率用SPSS19.0统计软件进行卡方检验,精子活率和精子顶体完整率用单因素方差分析,结果用“平均值±标准差”表示。P<0. 05表示差异显著,P>0. 05表示差异不显著。
供水过程状态在信息空间中的运动轨迹,不仅反映了过程的所有动态信息,而且反映出了控制作用对过程的影响。在设计控制器时,采用如表1 所示的原型算法的改进算法,对供水过程控制的效果更好,可很方便地用产生式规则形式“If〈condition〉Then〈action〉I”描述该控制算法。表中e 为系统的误差,r 为给定值,y 为被调量。KP,比例增益;K1,增益放大系数,K1>1;K2,抑制系数,0 <K2<1;PO(n),控制输出量P 第n 次需要保持的值;PO(n-1),第n-1 个控制周期控制输出量P 需要保持的值;M1、M2,误差阈值,且M1> M2;em,n,e 的第n 个极值。

表1 控制规则算法
5 仿真实验及分析
5.1 供水过程的实验仿真
供水系统的控制论特性,如系统参数的未知性、时变性、非线性、过程变量间的关联性等,由于其不确定性导致难以对供水过程进行数学建模,因此难以考察控制策略的控制效果。但是仿真实验总是需要模型的,工业控制对象中比较复杂也是最常见的是二阶环节大滞后环节,它是最典型的工业控制对象,如果控制算法的鲁棒性很强,那么对象的任何参数发生变化其控制效果并不受参数变化的影响,仍然可以获得良好的控制品质。基于鲁棒性分析,针对供水系统是大惯性对象,可将其供水过程近似为一阶惯性环节加纯时滞的模型进行描述,也就是将供水过程的数学模型假设为

式中:K 为增益系数;τ 为纯滞后时间;T 为过程的时间常数,其模型的控制参数一般可用阶跃响应法确定。为了方便,文中选取模型增益K=1,时延τ=2,时间常数T=1.2,于是有

在Matlab 环境下,利用Simulink 工具箱可搭建系统仿真模型。在阶跃输入信号下,为了便于比较控制算法的控制品质,分别采用PID 算法和仿人智能控制算法HSIC 作用于同一被控过程,对供水过程的控制效果进行仿真。按照上述假设,实验的仿真曲线如图3 所示。
由图3 可以看出:PID 控制响应曲线1 的上升时间与调整时间均不及HSIC 控制时间快,虽然PID 控制与HSIC 控制都未产生超调,通过两者比较可知,HSIC 控制策略有更好的控制品质。

图3 过程响应曲线比较
5.2 控制策略的鲁棒性分析
为了考察仿人智能控制算法的鲁棒性,可分别改变过程的控制参数,观察其响应变化,比较控制品质的优劣。如前所述,过程参数在原假设(增益K =1,时延τ =2,时间常数T=1.2)基础改变可能有4 种情况:
①时间常数T 改变
如时间常数T 由1.2 s 增加到2 s,在增益K 与时延τ 均不变时,2 种控制的响应曲线如图4 所示。比较其响应曲线可知,HSIC 控制策略的响应曲线几乎没有发生变化,但是非常明显,PID 控制策略的响应曲线有比较大的超调现象产生。

图4 时间常数改变的响应比较
②改变时延τ
如时延τ 由2 s 增加到4 s,在增益K 与时间常数T 均不变时,2 种控制的响应曲线如图5 所示。从图5 可以看出,HSIC 控制的响应曲线几乎没有发生什么变化,仅在响应时间上向后推迟了2 s,但是PID 控制的响应曲线产生了大幅度的超调,仿人智能控制表现出明显的优越性。

图5 改变τ 的响应比较
③增益系数K
如增益系数K 由1 增加到10,在时延τ 与时间常数T 均不变时,2 种控制的响应曲线如图6 所示。从图6 中的响应曲线对比,可以非常明显地看出:HSIC 控制的响应曲线几乎没有发生什么变化,仍保持无超调而控制响应平稳,但是PID 控制的响应曲线不仅有严重的超调量产生而且还产生震荡。

图6 改变增益系数的响应比较
④过程传递函数由一阶改变为二阶环节
如果在原传递函数基础上增加一个惯性环节1/(2s +1),即传递函数由W(S)=Ke-τs/(Ts+1)变化成为W(S)' =Ke-τs/(Ts+1)(2s+1)时,分别采用PID 算法和仿人智能控制算法HSIC 作用于同一被控过程,对供水过程的控制效果进行仿真,从图7 的响应曲线可以看出,HSIC 控制的响应曲线几乎没有发生什么变化,无超调量出现,控制效果平稳,但是PID 控制却产生严重超调。

图7 二阶过程的响应比较
⑤仿真实验的分析结论
上述鲁棒性实验表明,无论参数发生什么变化,甚至过程由一阶过程变为二阶过程,采用控制算法HSIC 的控制响应都是令人满意的,与PID 控制相比,基于HSIC 的控制有很强的鲁棒性。PID 控制出现明显超调,上升与调整时间都不及HSIC 快,而HSIC 控制的响应几乎没有什么变化,所以,仿人智能控制策略具有良好的控制品质。
6 结束语
通过仿真分析,可以得出结论:仿人智能控制策略对过程参数变化不是很敏感,该策略具有很强的鲁棒性;该策略无论在稳定性、快速性还是准确性方面都比PID 控制具有明显的优越性。因此,对恒压供水泵站节能系统应当是一种首选的控制策略,该策略不仅可以获得好的动、静态控制品质,而且节能效果是非常显著的。
[1]彭莉,林鹰,杨奕.复杂系统控制中的相关技术讨论[J].西南师范大学学报,2004,29(6):1066-1068.
[2]Cai Zixing,Zhou Xiang,Li Meiyi.A Novel Intelligent Control Method Evolutionary Control[C]//Proceedings of the 3’d World Congress on Intelligent Control and Automation.[S.l.]:[s.n.],2000:387-390.
[3]李士勇.模糊控制神经控制和智能控制论[M].哈尔滨:哈尔滨工业大学出版社,2003.
[4]李祖枢,涂亚庆.仿人智能控制[M].北京:国防工业出版社,2003.
猜你喜欢
选煤技术(2022年2期)2022-06-06
科技研究·理论版(2021年22期)2021-04-18
农业机械学报(2020年2期)2020-03-09
电机与控制学报(2018年8期)2018-05-14
西部资源(2017年5期)2018-02-23
海峡科技与产业(2017年12期)2018-01-18
北京航空航天大学学报(2017年1期)2017-11-24
电脑知识与技术(2016年29期)2017-04-27
电脑知识与技术(2016年28期)2016-12-21
科技视界(2016年16期)2016-06-29
