
舰载连续波测量雷达外引导数据实时处理方法研究*
2012-07-11 08:47潘佳梁衣同胜
舰船电子工程 2012年9期
潘佳梁 衣同胜 李 兵
(92941部队91分队 葫芦岛 125000)
1 引言
连续波雷达具有设备简单,测距精度高,可同时测速等优点,越来越多的用于航天飞行器、导弹、轨道卫星等的测量和控制,为鉴定武器系统的精度提供可靠的依据[1~4],舰载连续波测量雷达实现了舰载动平台外弹道测量应用,拓展了测量雷达的应用场合和应用方式。然而,由于舰载连续波测量雷达采用固态有源阵列天线,为非相控模式,天线波束指向通过伺服控制,因此自主捕获能力较弱,采用外引导数据引导舰载连续波雷达捕获目标后进行稳定跟踪测量。同时,由于舰载平台本身的位置移动和姿态晃动特性,对外引导的数据处理提出了新的要求,需要在坐标变换过程中消除船体位置移动和姿态摇晃所带来的误差,而且引导数据为装备测量数据,需要进行外推和剔野处理。
文献[5]介绍了程序引导和数据引导的区别,并实现了程序引导与数据引导互相备份的功能;文献[6]提出了基于数据融合的方式实现光学测试设备稳定跟踪目标的方法;文献[7]对引导数据进行了误差分析,并通过分析误差调整数据处理模型中的滤波参数,从而达到稳定引导跟踪目标。本文提出了一种实时快速数据处理方法,能够在引导数据有效条件下快速引导雷达捕获跟踪目标,在实际应用中证明此方法能够实现雷达稳定跟踪目标。
2 雷达接收引导数据预处理
舰载连续波测量雷达主要对目标进行捕获跟踪和测量,由于雷达测量是在雷达极坐标上进行,指控中心传输给雷达的数据为以地心为坐标原点的地心直角坐标系。连续波测量雷达根据中心传输的地心系下的X、Y、Z值进行剔除野值、外推后转换为雷达极坐标系下的R、A、E送跟踪控制器后控制伺服系统进行随动,使目标进入雷达波束从而捕获跟踪目标。
为了保证剔除野值和外推时,目标地心位置坐标X、Y、Z与速度值不相关,在进行剔除野值和外推时,位置和速度分别做剔除野值和外推。这样可以保证在某一个数值出现误码时不至于影响到其他数据的剔野和外推,但出现误码会对后续坐标变换时产生影响,通信误码的产生受通信信道传输的影响,因此无法控制。由于雷达进行目标捕获跟踪时,对于数据处理实时性要求很高,因此实际应用中采用了一系列简化快速的外引导数据拟合外推算法,保证了雷达数据处理实时性要求。从舰载连续波测量雷达实际应用中证实了此种方法的有效性和可行性。算法流程如图1所示。
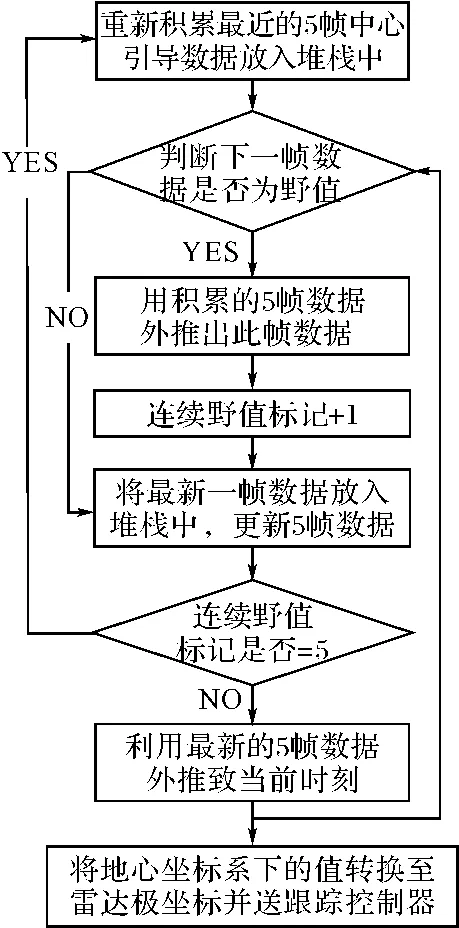
图1 舰载连续波测量雷达接收中心数据引导流程图
2.1 引导数据格式
指控中心传输给舰载连续波测量雷达的引导数据为各个其他测控装备测量获得的目标空间坐标值,指控中心将实时数据进行数据融合后得到当前时刻目标的地心空间坐标XYZ以及目标速度并发送给各个测控装备作为引导信息源。为满足实时引导需求,引导信息数据帧速率为20帧/秒。数据格式见表1所示。

表1 引导数据信息字段
2.2 引导数据剔野外推方法
1)中心引导先积累5帧数据,数据如表2所示。

表2 积累5帧中心引导信息表

3)求出5帧数据的均方根误差δX、δY、δZ、δVx、δVy、δVz
由于时间等间隔,因此均方根公式可以简化为公式(2)所示,δY、δZ、δVx、δVy、δVz也同δX一样进行处理:

4)确定判定野值的标准
收到第6帧中心数据时,对地心位置X、Y、Z和地心速度Vx、Vy、Vz分别进行野值判定,判定标准分别为:10δVz。只要X、Y、Z、Vx、Vy、Vz存在一个为野值时,则此帧数据为野值数据,连续野值标记增加1。
5)野值处理过程
若为野值,则丢弃该帧,用积累的5帧数据拟合出下一帧的值来代替野值并存入堆栈用于后续外推。考虑到拟合的实效性和准确性,采用线性加权拟合的方式,由于为等间隔时间,因此拟合方法如公式(3)所示,α、β、χ、γ为权重系数,考虑到引导信息中时间最近点的先验信息对于目标下一时刻的预测位置贡献较之前的先验信息要大,因此分配权重时,α>β>χ>γ,为了便于计算机快速实时处理,实际应用时取α=4,β=3,χ=2,γ=1,Y6、Z6、Vx6、Vy6、Vz6也同X6一样进行野值处理。
在依法治国的背景下,有法可依是党和政府做一切事情的前提。只有厘清该责任制的法律和政策依据,才使得该责任制的建立具备了合法性和正当性,进而才能有落实和推广的基础。

6)连续野值处理
考虑到中心引导数据突然中断后恢复,或者传输目标发生变化时,会发生计算机认为的连续野值现象。但此时可能不为连续野值,只是由于通信中断后恢复时,数值变化较大而导致的。因此,这种情况需要重新累计5帧数据用于外推引导。根据(4)中野值判定标准,如果连续野值标记大于5时,返回步骤(1),重新积累5帧数据,然后再开始进行剔野外推。
7)外推到当前时刻送跟踪控制器
在进行野值处理完成后,获取当前B码时间Tcurrent,将堆栈中最新的5帧数据进行加权外推至当前时刻的地心坐标位置和速度。α、β、χ、γ为权重系数,同样考虑到引导信息中时间最近点的先验信息对于目标下一时刻的预测位置贡献较之前的先验信息要大,因此实际应用时取α=4,β=3,χ=2,γ=1,由于中心引导数据时间间隔相等Δt=50ms,外推公 式 可 以 简 化 公 式 (4)所 示,Ycurrent、Zcurrent、Vxcurrent、Vycurrent、Vzcurrent也同Xcurrent一样进行外推处理。

3 雷达接收引导数据坐标变换
坐标系是空间数据的基准,坐标变化是使引导数据转换成雷达能够驱动伺服的数据,不同的坐标系定义不同,之间相互转换的方法也不同[8~9]。在本文里中心的外引导数据进行数据预处理后,首先要将地心空间直角坐标转换为大地直角坐标,也就是北天东坐标;然后将稳定的大地直角坐标转换为不稳定的以船为平台的雷达直角坐标(实现船摇隔离);经过坐标平移消除坐标系中心的位置偏差;最后将雷达直角坐标转换为雷达极坐标并控制天线伺服的转动,实现外部引导数据对目标的跟踪。坐标转换流程图如图2所示。
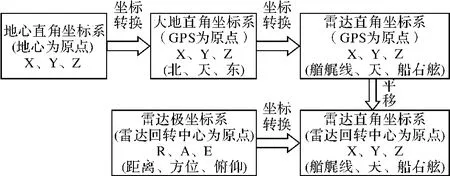
图2 舰载连续波测量雷达引导数据坐标转换流程图
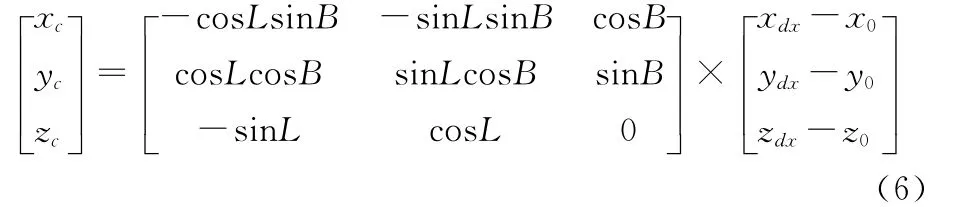
3.1 地心空间直角坐标转换为大地直角坐标
如图3所示,小黑点表示雷达,经纬高分别为L、B、H。地心空间直角坐标系某点为(xdx,ydx,zdx),大地直角坐标系某点为(xc,yc,zc)。
设雷达中心位置在大地直角坐标系中的值为(x0,y0,z0),则:
对于地心空间直角坐标系下的某点(xdx,ydx,zdx),若转换到大地直角坐标系下,则需要经过平移和坐标轴旋转两个步骤。
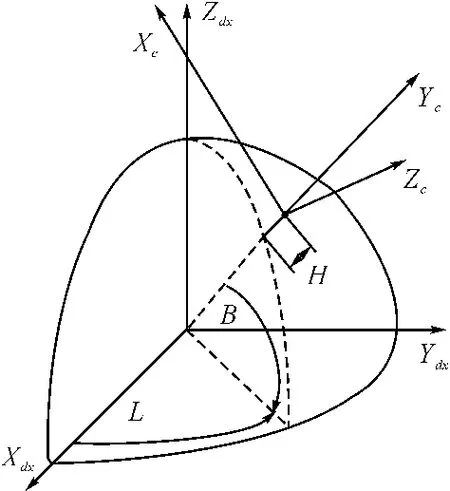
图3 地心空间直角坐标转换为大地直角坐标(北天东)
第1步,平移:将坐标系中心从地心移动到雷达中心。
第2步,坐标轴旋转:首先将空间点(xdx,ydx,zdx)绕Y轴旋转-90°,再绕X轴旋转-(90-L)°,最后绕Z轴旋转-B°。再将坐标中心从地心移动到雷达中心,即完成了变换。
3.2 大地直角坐标转换为不稳定平台的雷达直角坐标
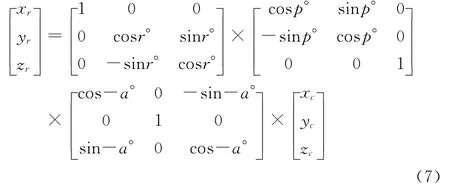
如图4所示,现在要将稳定的大地直角坐标转换为以船为平台的不稳定的雷达直角坐标,以消除舰船航向,纵、横摇的影响。
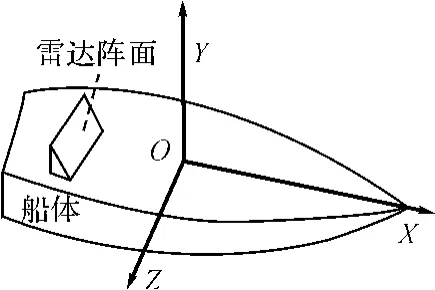
图4 从稳定的大地直角坐标到不稳定的以船为平台的雷达直角坐标
我们用三个量来衡量船体的方向和晃动。航向角:X轴和正北方向之间的夹角,当航向右偏离正北方向时为正;纵摇角:X轴向上为正;横摇角:Z轴向下为正。
设航向角为a,纵摇角为p,横摇角为r。则大地直角坐标系下某点(xc,yc,zc)先绕Y轴旋转-a°,再绕Z轴旋转p°,最后绕X轴旋转r°即得到以船为平台的雷达直角坐标(xr,yr,zr)。
3.3 将以GPS为中心的雷达坐标平移到天线中心
如图5所示。前面我们所讲的雷达坐标,实际上是以GPS接收天线为中心(还记得我们通过经纬高算出雷达在大地直角坐标系中的位置吗?那里的经纬高就是通过GPS得到的),如果要用外引导数据引导伺服转动,则必须使得图5 将以GPS为中心的雷达坐标平移到天线中心引导数据以雷达天线为中心,因此需要进行坐标平移。将以GPS为中心的空间点(xr,yr,zr)平移到以天线为中心的空间点(xa,ya,za),转换公式如(8)所示。
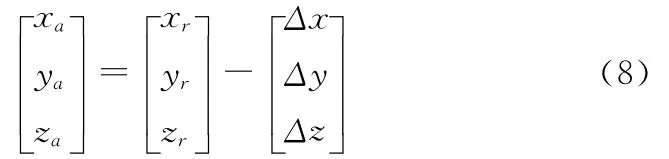
其中(Δx,Δy,Δz)表示天线在以GPS为中心的直角坐标系中的位置。
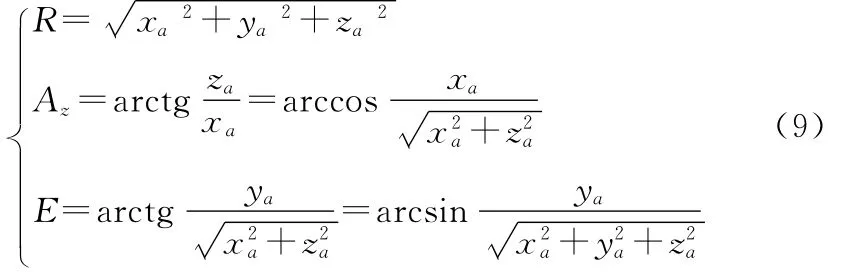
3.4 将雷达直角坐标转换为雷达极坐标
将以天线为中心的雷达直角坐标系下的点(xa,ya,za)转换为以天线为中心的大地球坐标系(R,Az,E)。
4 舰载连续波雷达应用分析
对上述外引导数据进行处理后,应用与某舰载连续波测量雷达,雷达接收天线的主波束宽度为1°×0.5°,因此中心引导数据经过处理后必须能够引导雷达使目标进入雷达波束内方能捕获跟踪目标。某舰载连续波测量雷达采用本文提出的引导数据实时处理方法,能够快速引导雷达捕获并跟踪目标。
事后对雷达跟踪目标测量数据与中心引导数据进行精度对比分析,由于中高空目标与低空目标对于舰载连续波测量雷达捕获能力和跟踪精度有一定的差别,分别对比舰载连续波测量雷达跟踪中高空目标和低空目标的数据进行分析对比,结果如表3所示。
从引导数据与雷达测量数据比对分析,中心引导数据通过本文提出的方法进行处理后,实时方位角与俯仰角误差均小于0.1°,小于舰载连续波测量雷达接收波束宽度,能够保证目标引导进入雷达波束从而满足雷达捕获跟踪条件。但从数据对比看出,中高空目标误差均要小于低空目标误差,这是由于雷达跟踪测量精度低空目标受多径干扰以及海杂波的影响导致,误差的增大主要是雷达低空测角精度的降低所致。图6与图7分别为中高空目标引导数据和低空目标引导数据与雷达测量数据误差对比曲线图。从图中可以看到,引导信息经过处理后实时提供给舰载连续波测量雷达作为目标指示,其精度完全满足雷达测量要求,进一步验证了本文提出的外引导数据快速处理方法是有效可行的。

表3 引导数据与雷达测量数据精度对比表
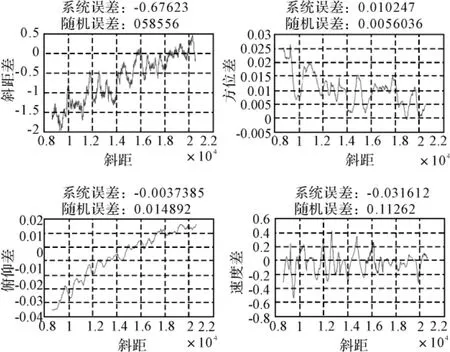
图6 中高空目标引导数据与雷达测量数据误差曲线图
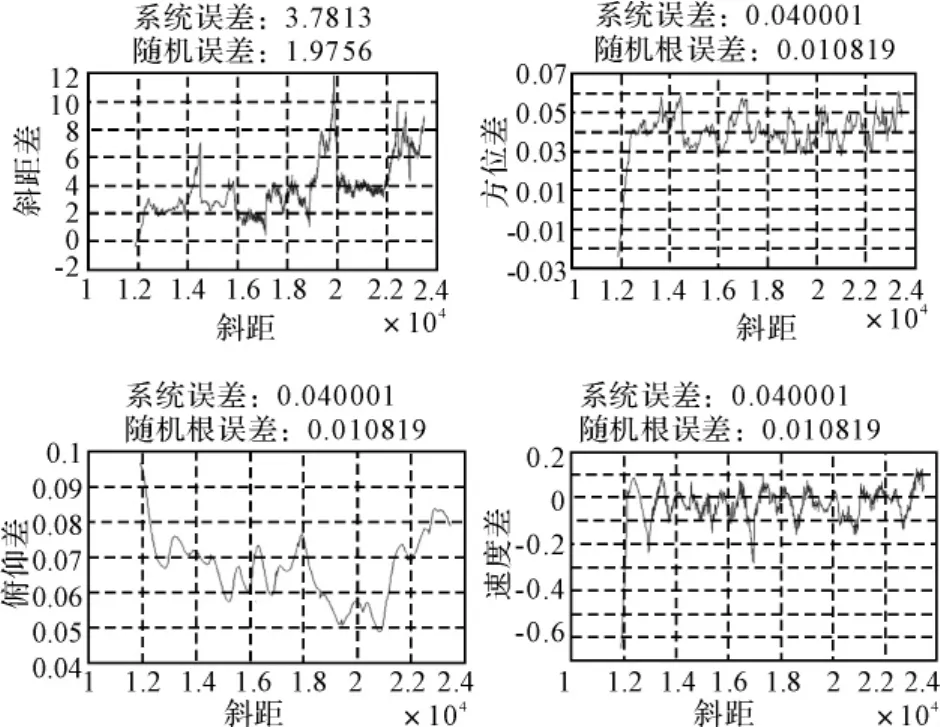
图7 低空目标引导数据与雷达测量数据误差曲线图
5 结语
本文提出了一种外引导数据实时快速处理方法,对中心提供的地心系下的XYZ坐标进行实时剔野外推预处理后,再通过实时坐标转换将目标信息转换至雷达极坐标系下的R、A、E送跟踪控制器后控制伺服系统进行随动,使目标进入雷达波束从而捕获跟踪目标。在舰载连续波测量雷达引导精度满足雷达捕获条件,能够有效辅助雷达捕获跟踪目标,实际应用中证明了其有效性和可行性。
[1]王德纯.精密跟踪测量雷达技术[M].北京:电子工业出版社,2006:400-401.
[2]翟厚明.线性调频连续波雷达导引头信号处理系统研究[D].南京理工大学,2005.
[3]杨建宇.线性调频连续波雷达理论与实现[D].电子科技大学,1991.
[4]丁鹭飞.雷达原理[M].北京:电子工业出版社,1984:165-168.
[5]张建飞,钱小云,沈宇.船载天地VHF伺服程控引导原理及改进设计[J].无线电工程,2009,39(4):47-49.
[6]吕日好,孔祥和,郭文胜,等.引导信息处理中的数据融合[J].仪器仪表学报,2006,27(6):1372-1373.
[7]杨辉,吴钦章.光测设备引导数据的误差分析[J].电光与控制,2010(7):83-86.
[8]戴勤奋.地理信息系统的坐标系定义[J].海洋地质,2002,18(6):24-27.
[9]杨元喜,徐天河.不同坐标系综合变换法[J].武汉大学学报:信息科学版,2001,26(6):509-513.
[10]顾晶,何昇浍.一种基于形态学滤波的雷达目标检测方法[J].计算机与数字工程,2012(2).
[11]李旭东,陈冬,程鹏.二次散射对脉冲激光雷达回波功率的影响[J].计算机与数字工程,2012(1).
[12]李大成,赵宏斌.基于坐标变换的视轴稳瞄算法[J].光电技术应用,2011,26(2):5-8.
猜你喜欢
中国慈善家(2022年3期)2022-06-14
成都信息工程大学学报(2022年2期)2022-06-14
中学生数理化·七年级数学人教版(2022年4期)2022-04-26
中学生数理化·七年级数学人教版(2022年4期)2022-04-26
中学生数理化·七年级数学人教版(2022年4期)2022-04-26
中学生数理化·七年级数学人教版(2021年4期)2021-07-22
文苑(2018年22期)2018-11-19
文苑(2018年18期)2018-11-08
电子制作(2016年1期)2016-11-07
小星星·阅读100分(高年级)(2016年11期)2016-09-10
