
基于RBF神经网络的自动泊车路径规划
2012-07-18 06:15钱立军
合肥工业大学学报(自然科学版) 2012年4期
吴 冰, 钱立军, 虞 明, 吴 坚
(1.合肥工业大学 机械与汽车工程学院,安徽 合肥 230009;2.安徽科力信息产业有限责任公司,安徽 合肥 230088)
基于RBF神经网络的自动泊车路径规划
吴 冰1, 钱立军1, 虞 明1, 吴 坚2
(1.合肥工业大学 机械与汽车工程学院,安徽 合肥 230009;2.安徽科力信息产业有限责任公司,安徽 合肥 230088)
文章通过逆向路径规划分析平行泊车过程的可能碰撞点和计算泊车所需的最小泊车空间,用泊车初始区域代替传统路径规划的初始点,实车试验采集泊车过程的数据,采用不同的数据样本用于粒子群优化的RBF神经网络,避免对安全距离等多种约束关系的分析,使规划的泊车路径能较好适用于实际泊车过程。仿真结果和实车试验均表明按照上述方法生成的路径泊车成功率较高。
平行泊车;逆向路径规划;RBF神经网络
随着城市车辆数目逐渐增多,泊车的空间也就显得更加有限,从而对驾驶员的泊车技术有了更高的要求,特别是在平行泊车的环境复杂情况下,经验不足的驾驶员平行泊车成功率不高。早期出现的辅助泊车主要是通过超声波或者是倒车影像的方法提示泊车的安全距离,并未给出合理的泊车路径。目前市场上装备泊车系统多为国外几家大汽车厂商的高档车型,其自动泊车系统有效地避免或减少了在泊车过程中对人和车辆造成伤害,提高了车辆的安全性能,但是价格昂贵,不利于在国内中低档车型上推广。国内外对自动泊车的研究主要集中在2个方面:基于路径的规划,再跟踪路径泊车[1-4];提取经验,运用模糊控制技术完成泊车[5-6]。本文运用路径规划和RBF神经网络的方法[7-9],对自动平行泊车路径进行研究。
1 自动平行泊车系统的流程
自动平行泊车的操作流程主要有以下3步:
(1)驾驶汽车驶过预泊车车位,如图1所示,即S0S1段,根据传感器探测的泊车空间判断能否泊车并做出相应的提示。
(2)在满足泊车的前提下将车停在合理的起始位置,挂入倒挡开始泊车,即S1S2S3段。
(3)驾驶员监视自动泊车的过程,注意泊车过程中突发事件和最后的车身调整。
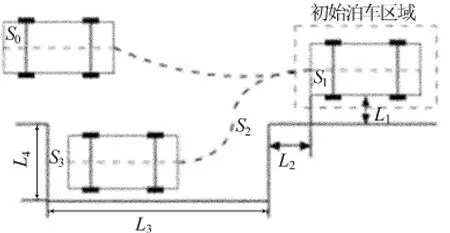
图1 自动平行泊车示意
2 平行泊车的逆向路径规划
本文主要考虑对第2步的路径规划,即从倒车的起始点到入库的终点。为了考虑泊车过程可能存在的碰撞点,故采用逆向路径规划,也就是从泊车的终点驾车到泊车的起始点,路径分为2段相切的圆弧,此过程也便于实际试验中数据的采集和提高泊车成功率。
2.1 车辆运动学模型
在泊车的过程中,车辆处于低速的运动状态,可以忽略车辆的横向滑动,故可用运动学模型代替其动力学模型。
根据阿克曼转向模型,如图2所示,车辆以后轴延长线上的O′点做圆周运动,Rmin为车辆的最小转弯半径,R1、R2、R3、R4分别为到车辆4个顶点距离,L为车长,d为车宽(不考虑车宽与轮距的差距),θ为车身与水平夹角,φ为车轮的转向角,取逆时针方向为正,顺时针方向为负。
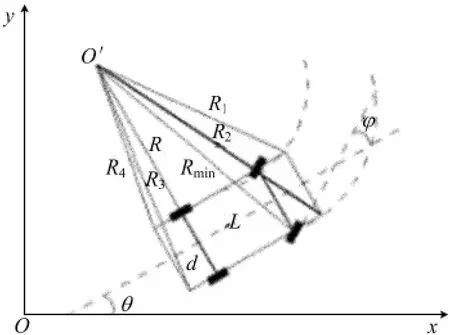
图2 车辆运动学模型
2.2 计算最小泊车空间
最小泊车空间也就是车辆在用最小转弯半径下能够泊车成功的空间,采用逆向的方法便于考虑碰撞点的情况。如图3所示,车辆从终点开出泊车空间,在S3S2段可能会在A点、B点发生碰撞。
根据车辆运动学模型,可知在做圆周运动时,半径较大的是圆心到车辆的右前点、右后点,即
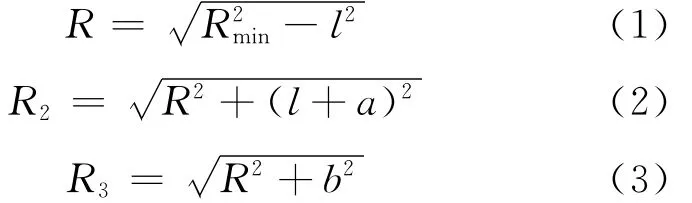
其中,R为后轴外侧轮的转弯半径;a、b分别为车辆的前悬、后悬;l为轴距。
可知最小泊车空间的长度L3min为:

其中,r为车辆与障碍之间的安全距离,可以取值为(300±50)mm。将实验车辆的参数代入(1)~(4)式中计算,可知该车型泊车需要的最短泊车长度为6 342.97mm,泊车完成调整车身位置后前后预留距离为446.49mm。
2.3 泊车起始位置的确定
在车辆到达B点后,并不能马上停车打方向,若是马上进入S2S1段,车身右侧还是会跟B点发生碰撞,解决方案有2种:回正方向盘直行一段距离再打反方向;维持原来转角行驶一段距离再打反方向。本文是采用2段圆弧路径的方法,故按第2种方案行驶。
用一般的路径规划的方法确定泊车的路径后,泊车的初始位置就已经确定,在假定泊车时车身的θ=0°,泊车的初始点在一条固定直线上,但是驾驶员很难将车停到预先规定的位置,从而影响随后的泊车过程和泊车成功率。
所以本文采用选取泊车初始区域的方法,驾驶员在准备泊车时寻找初始泊车区域较寻找初始点容易,提高了泊车的成功率(图1)。根据试验经验,可选取L1的范围为500~2 000mm,L2的范围为500~1 500mm。
3 基于RBF网络的泊车路径规划
基于RBF网络的泊车路径生成的方法,首先结合逆向路径的规划和正向的泊车试验,采集泊车过程中的数据,然后通过RBF网络对采集的数据进行训练拟合生成泊车路径[7-9]。
3.1 泊车路径数据的采集
为避免在泊车路径规划的过程中过多地考虑车辆与障碍之间的安全距离,所以只采集无碰撞的泊车过程中的数据。
本文主要用正向和逆向的2种泊车方法进行试验,试验前先在地上标记出泊车的初始区域,以便下一步试验。
(1)正向试验方法。由图1可知,在寻找泊车位S0S1段,可以通过超声波传感器探测出泊车位的L3、L4的大小,将其与最小泊车空间进行比较判断能否泊车。若能泊车,记录下L3、L4,再将车行驶到预先标记的初始泊车区域随意位置,并注意车身水平θ=0°,记录下车身右后点的坐标,即L1、L2,此时开始准备倒车,记录转向盘转角。在倒车过程中的S1S2段、S233段,均随机选取2个采集点,再记录S2点车身右后点的坐标、车身的θ角,并记录S2点转向盘转角,倒车无碰撞且车身水平视为泊车成功,记录此时的右后点的坐标,用此方法采集25组数据。
(2)逆向试验方法。选取比最小车位大的车位,将车停在其中,再驾车行驶到标定的初始泊车区域的任何地方,开始和完成时的车身θ=0°,行驶中间无碰撞,采集数据的方法与正向的试验过程相同,采集25组数据。
采集后数据可以用矩阵表示为:

T为50×11的数据矩阵,在用RBF网络训练时,可以选取不同组合的数据作为输入数据和输出数据。
3.2 RBF神经网络的建模
RBF神经网络是一种2层的前馈型神经网络,如图4所示,2层分别为径向基函数的隐含层和线性输出的输出层。网络的输入、输出映射功能强,隐含层的核函数一般选用高斯函数,RBF神经网络训练时间短,学习速度和收敛速度快,在理论上网络可以任意逼近任何一个连续函数[7-9]。

图4 RBF神经网络结构
若选取的RBF神经网络是多输入多输出的网络,则输入层的输入为X=(x1,x2,x3,…,xi),输出层的输出为Y=(y1,y2,y3,…,yj);i,j=(1,2,3,…,n)。输入层只是输入数据到隐含层,所以认为RBF只含有2层网络,隐含层用高斯函数做径向基函数,所以隐含层的输出为:
2002年11月,江泽民在党的十六大报告中正式使用“中国特色社会主义”一词,将“有中国特色社会主义事业”表述成“中国特色社会主义事业”[5]528。此后,“中国特色社会主义”一直被沿用至今。因此,理论界普遍认为“中国特色社会主义”这个概念是在党的十六大第一次被正式提出和使用的。

其中,i=1,2,3,…,n;Φi为第i个隐含节点的输出;x为n维输入向量;xc为核函数的中心,xc为与x同维的向量;σi为第i个隐含节点的标准化常数即核函数的宽度,由此可以得到网络输出层的线性输出为:

其中,yj为输出层的第j个节点的输出;ωi,j为隐含层节点与输出层节点的连接权值;n为隐含层的节点。由(5)式、(6)式可得网络的输出公式为:

再由(7)式可知权值ω为:

在网络训练之前要对数据进行归一化,减小对网络训练收敛性的影响,得到输出后要对输出进行反归一化。
3.3 基于PSO优化的RBF神经网络
粒子群优化算法是通过迭代的方法求解全局最优解。具体的原理不再赘述,粒子迭代更新的公式如下:
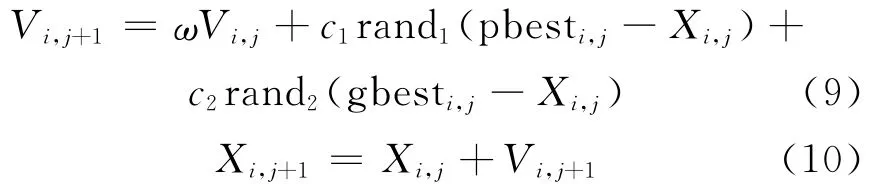
其中,V为粒子的速度;X为粒子的位置;ω为惯性权值;c1、c2为学习因子,通常取值为2;rand1、rand2为0~1之间的随机数;pbest、gbest分别为粒子的个体极值和全局极值。
可以利用粒子群优化算法来优化RBF网络核函数的中心、宽度和隐含层到输出层权值[10-12],学习算法步骤如下:
(1)用中心、宽度和权值建立粒子群体,对群体进行初始化,随机生成初始速度和位置,确定最大迭代次数。
(2)采用样本总误差ε= [∑∑(Y′-Y)2]/2为适应度函数,Y′为期望输出,Y为实际输出,评价每个粒子的适应度,若当前是最优更新pbest,若全局是最优更新gbest。
(3)根据(9)式、(10)式更新粒子的速度、位置,产生新的种群。
(4)判断是否到达最大迭代次数或者是误差满足条件停止迭代,用此时的最优值作为RBF网络的参数,若不满足条件返回步骤(2)。
3.4 基于RBF神经网络的路径学习
采集数据和建立RBF神经网络的模型后,可用泊车位的环境参数和泊车车身的航向角作为输入数据,用方向盘的转角作为输出,通过训练网络,再运用实际的泊车位数据计算出泊车时所需要方向盘转角和车身的位置,从而完成泊车。
本文首先选取部分初始泊车的数据训练RBF神经网络的模型,再选取部分数据做测试,比较网络输出值与实际值的差距,判断网络的收敛效果和学习的速率。
如图5所示,可以看出泊车车位的长度L3在6 400~6 460mm时,泊车成功率比较高,在最小泊车位时,成功率很低,这也与实际情况比较符合,在初始泊车位置不是很理想的情况下,很难将车泊入最小车位。
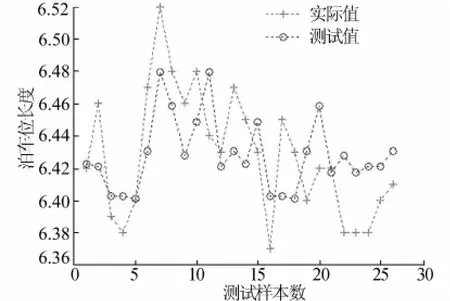
图5 泊车位长度的仿真
4 仿真结果与分析
根据上述方法,可以用Matlab软件对泊车的各种情况进行仿真。仿真采用车辆的参数为:L=4 352mm,d=1 794mm,a=908mm,b=894mm,l=2 550mm,Rmin=5 450mm。
选取有代表性的泊车初始点,根据车身的θ角和方向盘转角φ,对泊车的过程进行仿真,画出泊车过程的示意图。
如图6所示,根据L1、L2不同取值选取了6个泊车初始点。

图6 各种初始点泊车过程的仿真
图6a中选取的是L1、L2都较小的初始点,即车身离车位横向、纵向的距离都很短,仿真取值(600,600),从图中可以看出车身的θ变化率很大,能成功完成泊车,但与B点的安全距离过小。图6b中选取的是L1较大、L2较小的初始点,仿真取值(1 900,600),可以看出车身的θ变化率也很大,但也能成功完成泊车且安全距离也很小。图6c中选取的是L1、L2均处于中间值的初始点,仿真取值(900,800),可以看出车身的θ变化率较小,能成功完成泊车,且泊车过程中与碰撞点的安全距离适中。图6d中选取的是L1处于中间值、L2较大的初始点,仿真取值(900,1 200),即在横向上车身离泊车位较远,可以看出车身的θ在S1S2段变化率较小,S233段变化率较大,能成功完成泊车,且泊车过程中与碰撞点的安全距离适中。图6e中选取的是L1较小、L2较大的初始点,即车身在纵向上离泊车位较近,横向上很远,仿真取值(600,1 500),可以看出车身在B点发生碰撞,不能完成泊车。图6f中选取的是L1、L2均较大的初始点,即车身在纵向上、横向上离车位很远,仿真取值(1 900,1 500),可以看出车身在B点可能发生碰撞。从上述的仿真可以看出,若按照图6c、图6d的方法选取初始泊车位置的情况,泊车比较容易成功,在实际试验时也验证了仿真结果的准确性。
5 结束语
本文采用选取泊车初始区域开始泊车,解决了泊车准备阶段寻找泊车起始点的难题,提出逆向路径规划和基于PSO优化的RBF神经网络两者结合的方法,可以减少泊车过程中与碰撞点之间的距离的定量分析,使按照生成的路径泊车过程碰撞的可能性减小,泊车的成功率较高。仿真结果和实车试验均证明按照上述方法选取较合适的泊车初始点,采用本文方法生成的路径泊车均可以泊车成功,自动泊车系统可以按此路径完成控制车辆的平行泊车。
[1]姜 辉,郭孔辉,张建伟.基于路径规划的自动平行泊车转向控 制 器 [J].吉 林 大 学 学 报:工 学 版,2011,41(2):293-297.
[2]张 勤,曲宁玺,李 艳,等.自动泊车轨迹生成方法的研究[J].计算机仿真,2010,27(10):148-151.
[3]耿晓龙,李长江.基于人工神经网络的并行强化学习自适应路径规划[J].科学技术与工程,2011,11(14):756-759.
[4]Yao C C,Lin C F,Chang K J.A brake strategy for an automatic parking system of vehicle[C]//The 5th IEEE Vehicle Power and Propulsion Conference,VPPC,2009:798-802.
[5]Horii Masaki,Liu Kangzhi.Automatic parking benchmark problem:Experimental comparison of nonholonomic control methods[C]//The 26th Chinese Control Conference,CCC 2007:608-612.
[6]杨妮娜,梁华为,王少平.平行泊车的路径规划方法及其仿真[J].电子测试技术,2011,34(1):42-45.
[7]张 雯,谭宝成.一种改进RBF神经网络的机器人轨迹规划方法[J].电子设计工程,2010,18(1):10-11.
[8]王福斌,刘 杰,陈至坤,等.基于RBF神经网络参数优化的挖掘机器人运动轨迹仿真[J].中国工程机械学报,2009,7(4):379-382.
[9]刘 钰,周 川,张 燕,等.基于RBF神经网络的轮式移动机器人轨迹跟踪控制[J].计算机工程与设计,2011,32(5):1804-1806.
[10]段其昌,赵 敏,王大兴.一种改进PSO优化RBF神经网络的 新 方 法 [J].中 国 工 程 机 械 学 报,2009,26(12):126-129.
[11]郭孔辉,潘 峰,张建伟.预瞄优化神经网络驾驶员模型[J].机械工程学报,2003,39(1):26-29.
[12]喻海军,刘翔宇,方 敏.基于ANFIS的汽车ESP控制方法研究[J].合肥工业大学学报:自然科学版,2010,33(7):1015-1019.
Path planning of automatic parallel parking based on RBF neural network
WU Bing1, QIAN Li-jun1, YU Ming1, WU Jian2
(1.School of Machinery and Automobile Engineering,Hefei University of Technology,Hefei 230009,China;2.Anhui Keli Information Industry Co.,Ltd.,Hefei 230088,China)
In this paper,based on the reverse path planning,the possible collision points in the process of parallel parking are analyzed and the minimum parking space needed is calculated.To get a better planned parking path applied to actual parking process and avoid the analysis of a variety of constraint relations such as safe distance,the initial point of the traditional path planning is replaced with the initial region,the data during the whole process of parking is collected by real vehicle tests,the different data samples are used for training radial basis function(RBF)neural network by particle swarm optimization to generate the parking path.Simulation results and real vehicle tests show that the proposed method achieves a higher parking success rate according to the path generated with the above method.
parallel parking;reverse path planning;radial basis function(RBF)neural network
U471;TP391.9
A
1003-5060(2012)04-0459-05
10.3969/j.issn.1003-5060.2012.04.006
2011-09-05
工业信息化部2009年资助项目(2009453)
吴 冰(1986-),男,安徽桐城人,合肥工业大学硕士生;
钱立军(1962-),男,安徽桐城人,博士,合肥工业大学教授,博士生导师.
(责任编辑 吕 杰)
猜你喜欢
世界汽车(2022年11期)2023-01-17
汽车实用技术(2022年19期)2022-10-19
汽车实用技术(2022年7期)2022-04-20
军民两用技术与产品(2020年3期)2020-04-07
电子制作(2019年19期)2019-11-23
重型机械(2016年1期)2016-03-01
大连工业大学学报(2015年4期)2015-12-11
汽车维修与保养(2015年7期)2015-04-17
汽车维护与修理(2015年6期)2015-02-28
汽车维护与修理(2015年2期)2015-02-28
