
小型海船锚系布置快速性设计方法研究
2012-07-19 01:13张明霞王运龙包文婧
中国舰船研究 2012年2期
王 侨 张明霞 王运龙,2 包文婧 管 官
1大连理工大学船舶工程学院船舶CAD工程中心,辽宁大连116024 2大连理工大学工业装备结构分析国家重点实验室,辽宁大连116024
小型海船锚系布置快速性设计方法研究
王 侨1张明霞1王运龙1,2包文婧1管 官1
1大连理工大学船舶工程学院船舶CAD工程中心,辽宁大连116024 2大连理工大学工业装备结构分析国家重点实验室,辽宁大连116024
由于《海船艏锚泊设计导则》(CB/Z 280-2011)只适用于载重2 000 t以上的钢质海船,未对小型海船的锚泊设计提出指导,故小型海船的锚泊设计需另寻方法。在总结小型海船锚系布置设计特点的基础上,针对小型海船锚链筒的布置即使反复调整其空间位置也难以满足对其长度的要求等问题,通过对锚链筒位置的几何模型进行分析,采用解析几何法解决了锚链筒的定位;基于CAD二次开发,实现了锚链筒最优位置确定。经验证,该方法速度快,能满足小型海船锚系布置的要求。
小型海船;锚系布置设计;二次开发
1 引言
我国工业和信息化部于2011年6月15日颁布了 《海船艏锚泊设计导则》(CB/Z 280-2011),并将于2011年10月1日实施。该标准的颁布实施是船舶制造发展过程中的一个标志,也是一个由经验上升到理论高度的指导性文件,它规定了钢质海船艏锚泊系统的设计依据、组成、布置原则和设计要求。该标准只适用于载重2 000 t以上的钢质海船艏锚泊系统的配置和布置设计,不适用于工程船的特种船舶艏部锚泊系统[1],也未针对小型海船的锚设备布置设计进行指导。载重2 000 t以上钢质海船的艏部甲板面积和布置空间较大,可给锚系设备布置带来很大的灵活性,而小型海船为了满足船舶快速性的要求,其艏部空间往往较小,能否合理地利用艏部空间便成为锚设备设计的重点。以往海船艏锚的设计都是在结合实际母型船和经验的基础上进行的,没有统一的设计准则,这就给设计人员造成了设计上的麻烦增加了重复性工作。在船舶的营运过程中,因人员上下、装卸货物、补充给养、躲避风暴、等候泊位、接受检疫以及避碰避让的需要,船只都必须停泊[2],而锚系设备是使船舶牢固停泊的关键部分。航运时,一旦走锚,其就不可能恢复至原位,若不及时采取有效措施,就会造成巨大损失[3]。在船舶设计中,锚系的布置设计对总布置设计的优劣具有一定的影响,尤其是锚链舱位置的选定对结构影响较大。锚设备一般包括艏部锚设备和艉部锚设备,而小型民船,特别是小型海船极少布置有艉部锚设备。锚系设计种类繁多,对于艏部锚设备而言,布置的核心就是合理确定锚链筒的位置,只有合理地确定了锚链筒的位置以后,才能确定锚系其他设备的位置。
2 锚设备设计
目前,锚设备的布置设计通常是在总布置图、型线图和锚链舱的位置基本确定之后进行,一般先根据设计经验与总布置图确定锚机的位置,然后再根据防撞舱壁的位置确定锚链舱的位置,待锚机与锚链舱的位置确定以后再确定锚链筒的位置。在进行艏部锚设备的布置设计时,一般应满足以下3点要求:
1)抛/起锚应灵活。在收锚时,锚杆应能不受阻碍地进入锚链筒,且锚爪要与船壳 (或锚穴后板)贴紧,锚冠贴紧锚唇;抛锚时,锚应能依靠其自身的重量毫无阻碍地从锚链筒中抛出[4]。
2)锚链筒舷侧开口应有相当的高度。起锚以后,为了使露在筒口外面的锚冠部分不引起水波而增加船舶阻力,锚链筒的舷侧开口应高出满载水线一定的距离,且距艏柱也应有一定的距离,以免锚收起后,锚冠突出艏柱。
3)对有球鼻的船,在抛/起锚时,锚与船体球鼻之间的距离应尽可能大,以避免船体反方向横倾2°时碰到球鼻艏,其最小距离应大于或等于300 mm[5]。
锚系在贴合的过程中容易发生的问题主要有:
1)由于锚链筒中心线与外板间的夹角过小,致使锚链筒的外板出口长轴过大,或由于锚唇上部高度过低,收锚时锚冠上的一块耳板被拉入筒口,从而出现锚杆下部与筒口卡住、锚杆上部与锚链筒内壁卡住的现象。
2)由于锚链筒中心线与外板间夹角过大,锚冠与锚唇下端互相脱离。
3)收锚时,锚杆上端与筒口卡住,锚杆进不了锚链筒。这是由于锚链筒中心线的侧面角过大,或是锚链筒外板出口处过于陡直[6]。
在进行锚设备设计前,需要进行锚及系泊计算而得到舾装数,然后再根据舾装数选取所需的锚链直径以及所需锚的类型与重量。
3 锚链筒位置的确定
锚链筒位置和角度的确定是锚设备布置设计的核心,其设计的好坏直接影响到船舶的操作安全。由于小型海船的艏部空间有限,因此在布置锚链筒时需反复调整其空间位置,以满足规范对其长度的要求。在锚收起的过程中,实际上存在2种情况:一种是锚杆始终不与锚链筒上壁发生接触;另一种是锚杆与锚链筒上壁接触,但仍能顺利起锚[7]。但建造完工的船舶,或是在进行拉锚实验时,经常会碰到操作不畅通的锚,导致这种现象的主要原因是锚链筒的布置设计不够完善。
3.1 锚链筒位置确定的设计规则
锚链筒用于在船舶航行时存放锚柄,在起/抛锚时做锚链的通道。锚链筒的式样与船舶的用途、船型以及选取的锚有很大关系。锚链筒的基本要求为[8]:
1)当船舶向任何一舷倾斜5°时,任何一个艏锚在收起时都不应卡住首柱和船底;
2)不论锚爪处于何种状态,锚都应能被拉进锚链筒,且其锚爪应贴紧船外板(或锚穴后板),锚冠贴紧锚唇;
3)被拖进锚链筒的锚,在航行时不会没入水中或掀起浪花,以免增加船舶阻力;
4)锚应只需依靠其自身的重量便能无阻碍地从锚链筒中抛出;
5)锚链筒的筒身长度应足以安置锚柄和4节锚链;
6)舷侧和甲板的锚唇(若有的话)在锚链通过部分应有足够大的圆弧,以使链环受到的弯折为最小;
7)在多层甲板船上,锚链筒在舷侧处出口中心的位置应使锚链筒的筒身不穿过下层甲板。
锚链筒的位置确定是锚设备布置的核心,小型海船由于艏部型线较消瘦,便给锚设备的布置设计增加了难度。下面将介绍锚链筒位置确定的计算原理。
从船体中心线至锚链筒轴线与甲板交点的距离a按式(1)计算,具体布置如图1所示。

式中,α0为通过锚链筒轴线的垂直平面与船体中心线之间的夹角,(°);c为卧式锚机两线轮之间的距离,mm;d为锚链公称直径,mm。
从船舶艏端至锚链筒轴线与甲板交点之间的距离 b 按式(2)和式(3)确定。
对于首部型线丰满的船舶:

对于首部型线一般的船舶:

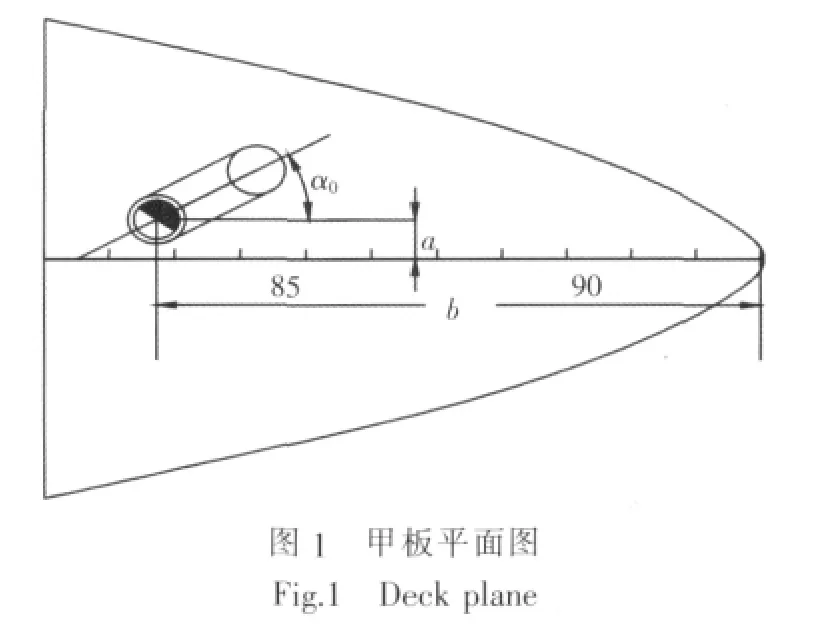
小型海船若采用双链轮卧式锚机,首部布置便会紧凑合理,其两根锚链伸出方向的水平投影与船体中心线平行或者稍微成微小角度。一般小型船舶选取的角度范围为 α0=0°~30°。若α0>30°,在起锚时锚链便容易形成麻花状,抛锚时锚链不容易下滑。当锚链筒与水平面之间的角度α0设计得较小,锚链筒比较平缓时,应适当加大锚链筒的直径,以便于顺利地起/抛锚。同时,还应特别注意锚链筒舷侧出口处锚唇的型线[9]。在通过锚链筒轴线的垂直平面上,为了顺利地抛/起锚,轴线与甲板的夹角应为 β=30°~60°(图 2)。 小型海船的艏部型线一般较瘦削,故距离选用b=(90~110)d。
3.2 锚链筒内径和锚链筒长度的确定
通常, 锚链筒的内径取为 8.5~10.5倍的锚链直径。其中,海船锚链筒的内径一般取10倍的锚链直径。若大、小船都取10倍的锚链直径,显然不合理。吴振锟[10]根据实际的锚链材料,分析得出锚较小时内径偏小,锚较大时内径偏大的结论。但该取法的提出已比较久远,因当时的船舶尺度均较小,锚链材料均为一级钢,将锚链筒内径取为9倍的锚链直径。对于直径较小的锚链筒,其筒体可直接采用钢管;对于直径较大的锚链筒,其筒身由上下 2个部分组成。其中,上半体壁厚 t1≥0.4d,下半体壁厚t2≥0.65t1。对于小型海船,为便于取材、加工和建造,可以取上、下半体壁厚为t1≥0.4d,即锚链筒壁厚为8 mm。锚链筒的长度不仅要能存放锚柄,而且还要存放与锚柄相连接的4节锚链,即末端卸扣、末端链环、加大链环和转环,并且要使锚链转环不得超过导链滚轮的中心线,或是不露出锚链筒外。对于小型海船的锚链筒,其船体外端一般不加锚台或锚穴,而是在锚链筒周围焊接一块大的腹板,然后安装锚唇,锚链通过处的锚唇圆弧半径一般为8~10倍的锚链直径。
3.3 编程实现锚链筒位置的确定
锚链筒位置的确定一直是小型海船舾装设计中1项繁琐而复杂的工作,因锚链筒、锚机、锚链管与锚链舱的位置是相互关联的。首先,由于锚机的位置固定,锚链筒在甲板上的位置也大致固定。在经由α0、β角度和锚唇高度的调整并满足锚爪与外板贴紧后,锚链筒长度的确定还需使锚链转环不超过导链滚轮的水平中心线或者不露出锚链筒外[11]。锚链筒的长度为锚柄长与4节锚链长之和,当在甲板上选定了锚链筒的开口位置后,便根据锚链筒的长度在外板上定位一个锚链筒出口。传统的方法是根据不同的型线设计锚链筒及锚唇的尺寸与形状,然后再按照设计方案制造木模,最后,根据木模拉锚试验的结果对锚链筒和锚唇的位置与形状进行修正,直至达到理想的效果。该方法在每次调整设计方案后,都必须重新制造木模,并且需要不断反复修正,不仅工作量大,浪费人力、物力和时间[12],而且还影响总布置设计,甚至导致不得不修改总布置图。本文通过分析锚链筒位置的几何关系,基于CAD二次开发编写了1套确定锚链筒位置的程序,不仅能大大简化工作,提高设计质量,而且还可缩短设计周期,为总布置设计争取时间。
3.4 编程思想
船舶艏部具有双曲度、相当复杂的空间曲面[13],因此,需要通过建立几何模型来确定锚链筒的位置。
第一步 画出锚链筒轴线所在垂直平面与船体相交的曲线,具体如下:
首先,根据总布置图在半宽水线图上标出锚机的位置T后,从T点量取TQ=b(取值范围为1 500~2 000 mm),从Q点做船体中心线的线段QW=a(由式(1)计算a的值),再过 W点做倾角为α0的射线L,与各个半宽型线相交于点A1,A2,A3…An,射线L与船体中心线相交于点B1。
其次,以 B1为圆心,分别以 B1A1,B1A2,B1A3…B1An为半径作圆(图3),然后以 B1为原点,分别量取各个圆的半径作为横坐标,各个半宽水线高hn为纵坐标来作曲线,即可得到锚链筒轴线所在垂直平面与船体相交的一组曲线S1。
最后,采用上述方法做出不同倾角α0时的曲线组 S1,S2,S3,…,Sn,如图 4 所示。
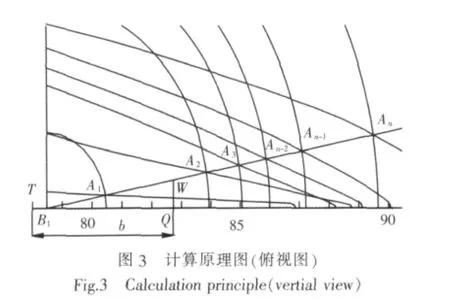
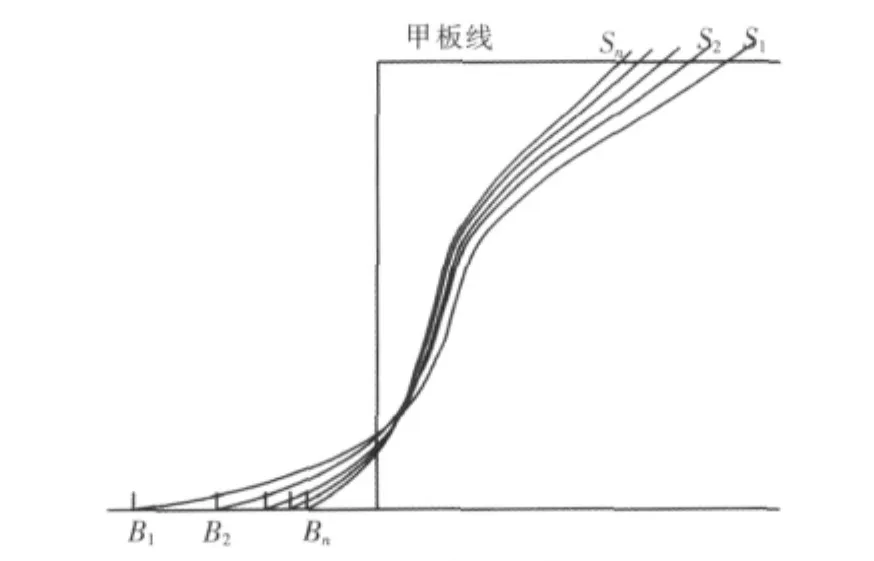
图4 斜剖面图Fig.4 Inclined profile
第二步 确定锚链筒的最优位置。
如图5所示,有3条直线,其中L1为过锚链筒轴线的直线,L2为L1向右平移n距离后得到的直线,L3为锚爪顶尖刚好在轮廓线上时,过锚爪轴线的直线。L1过点C与剖面轮廓线相交于点D,L2与剖面轮廓线相交于点A,L3与L1交于点B。设点A、点 B 的坐标分别为(x,y)和(p,q),点 C 的坐标为(0,h)(h为甲板上锚链筒中心距基线的高度)。
由如图6所示的锚侧视图,得

直线平移距离:

由几何关系,可以建立各个直线方程:

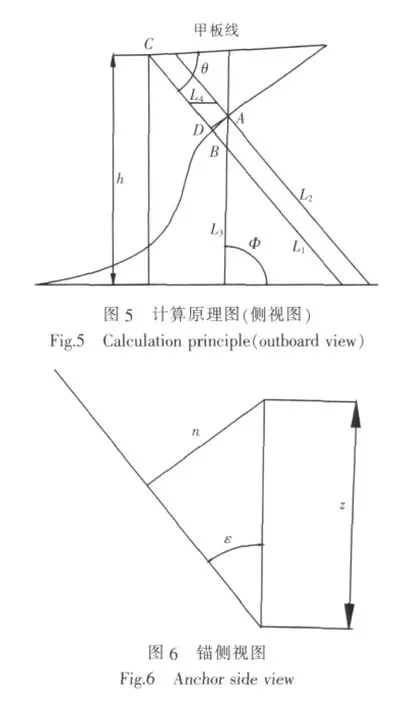
式(4)~(6)中,z为锚爪长度,mm;n 为锚爪前端至锚柄的距离,mm;L4为直线L1平移的距离,mm;θ为锚链筒轴线与甲板边线间的角度,(°);ε为锚爪倾斜角度,(°);α0为甲板面锚链筒轴线与中心线间的角度,(°);h为 C点的垂向高度值,mm;Φ=π-ε-θ。
通过解方程组,可以求得点D、点B的坐标,取得线段CB和CD,进而求得DB的长度和锚链筒长度CD,从而通过计算多组数据进行选优。程序的可视化界面如图7所示。
4 算 例
本文将以某400 t海监船为算例进行计算,其参数如表1所示。
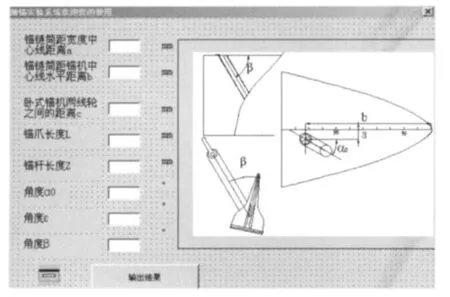
图7 程序界面图Fig.7 Program Interface
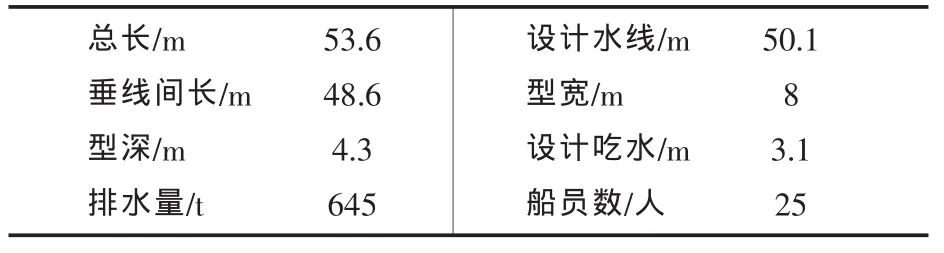
表1 船舶主尺度Tab.1 Principal dimensions of the ship
该船选取2只霍尔锚,每只重570 kg,选取有档锚链AM2-Φ24,全船锚链总长302.5 m。因小型海船的艏部窄小,布置空间较小,为此,选取了1台对称式电动起锚机。由于受艏部型线的影响,将锚机中心位置选取在防撞舱壁后面,为适应布置和结构的需要,将锚链舱也放在舱壁后。然后,确定锚链筒在甲板上的位置并进行锚设备布置设计。
按照设计手册的要求,对于小型海船,b距船首的距离范围为2 160~2 640 mm。但通常情况下,船舶也要考虑其自身的特殊性,如小型海船首部升高明显、舷墙外飘且有球鼻艏等。对于这样的船舶,对艏端的理解就不能仅仅是主甲板艏部最前端,而应为从球鼻艏的凹面向船中量取的距离。但从实际的操作中发现,这样远远不能适应布置的需要,通过对渔政船和渔船的实际考察,根据实际的需要和布置的合理性以及以往的经验,得到b的范围为1 500~2 000 mm,完全适合小型海船锚链筒位置的要求。
通过对数据进行比较分析,结果如下。
输入条件:a=413 mm,b=1 500 mm,c=826 mm,θ= 60°,α0=30°,ε= 38°,L= 1 042 mm,z= 732 mm。
传统计算结果:设计中的锚杆空间可用长度为2 297 mm,锚链筒长度为1 930 mm,锚距船体367 mm。
程序计算结果:设计中的锚杆空间可用长度为 2 275.37 mm, 锚链筒长度为 1 909.57 mm,锚距船体 365.80 mm。
由于传统的计算方法主要是由手工完成,因而不可避免会存在误差,但从两者的计算结果来看,以几何方法为原理的计算绘图程序完全满足工程需要。
5 结 语
小型海船锚系布置是实际设计过程中一个典型的问题。本文在介绍小型海船锚系布置特点的基础上,针对小型海船艏部布置空间紧张,设计过程中需要反复调整其空间位置等问题,基于CAD二次开发,实现了锚链筒位置的确定。经验证,该方法速度快,能满足小型海船锚系布置要求。
[1]中华人民共和国工业和信息化部.CB/Z280-2011 海船艏锚泊设计指导[S].北京:中国船舶工业综合技术经济研究院,2011.
[2]金仲达.船舶设备[M].哈尔滨:哈尔滨工程学院出版社,1991.
[3]杨林家,杨佐昌,于洋.船舶走锚预警系统[J].大连海事大学学报,2005,31(1):29-32.
YANG L J, YANG Z C, YU Y.Vessel anchor dragging early warning system[J].Journal of Dalian Maritime University,2005,31(1):29-32.
[4]陈金发.船舶锚链筒的设计和放样[M].北京:国防工业出版社,1978.
[5]舒根泉.船舶锚链筒布置设计[J].船舶设计通讯,2000,(3/4):45-46.
[6]刘贵杰,王猛,张兰昌,等.船舶锚系三维建模及拉锚实验的仿真分析[J].船舶工程,2009,31(3):24-26.
LIU G J,WANG M,ZHANG L C,et al.Simulation analysis of three-dimensional modeling and cat anchor test for ship anchor system[J].Ship Engineering,2009,31(3):24-26.
[7]姚珍祥.锚链筒与抛起锚的关系[J].船舶工程,2007,29(1):57-60.
YAO Z X.Relationship between hawse pipe and dropping and weighing anchor[J].Ship Engineering,2007,29(1):57-60.
[8]中国船舶工业总公司.船舶设计实用手册(舾装分册)[M].北京:国防工业出版社,2002.
[9]于刚.简述锚系设计[J].船舶设计通讯,2010(S2):91-93.
[10]吴振锟.简论锚链筒直径取值[J].大连船研,1990(3):24-27.
[11]袁红莉,熊云峰.运输船舶锚链筒和锚台的设计和放样[J].江苏船舶,2009,26(3):24-27.
[12]冯京京.浅谈Rhino软件在锚泊辅助设计中的应用[J].船舶设计通讯,2008(2):20-23.
FENG J J.Elementary introduction of the application of rhinoceros in the anchoring arrangement and correlative designs[J].Journal of Ship Desigan,2008(2):20-23.
[13]黄金峰.舰船船体曲面建模标准研究[J].中国舰船研究,2009,4(4):34-37,46.
HUANG J F.Convention for naval ship hull surface modeling[J].Chinese Journal of Ship Research,2009,4(4):34-37,46.
Anchoring Arrangement Design for Small Seagoing Ships Based on Fast Method
Wang qiao1Zhang Ming-xia1Wang Yun-long1,2Bao Wen-jing1Guan Guan1
1 Ship CAD Engineering Center, School of Naval Architecture Engineering, Dalian University of Technology,Dalian 116024,China 2 State Key Laboratory of Structural Analysis for Industrial Equipment, Dalian University of Technology,Dalian 116024,China
As Chinese ship design guideline for seagoing vessel’s bow anchoring CB/Z 280-2011 only applies to steel seagoing ship with 2 000 DWT and above, thus it’s necessary to find new design rules for those volumes less than 2 000 DWT.This paper summarized the characteristics of anchor equipment arrangement on small seagoing ships and found that even the spatial location were adjusted many times,it was still hard to meet the length demand of hawse pipe.Thus the paper proposed a method to determine the location by analytic geometry, after analyzing the geometric model of hawse pipe.Based on the secondary development of CAD, the optimum arrangement of hawse pipe was carried out.It is validated that the proposed method can effectively meet requirements of the anchoring arrangement in practice.
small seagoing ship; anchoring arrangement design; secondary development
U662.2
A
1673-3185(2012)02-86-05
10.3969/j.issn.1673-3185.2012.02.016
2011-09-21
国家公益性行业科研专项资助(201003024)
王 侨(1981-),男,硕士研究生。研究方向:船舶与海洋结构物设计与制造。E-mail:wangqiaoduting@163.com
张明霞(1969- ) ,女,博士,副教授。 研究方向:船舶波浪动稳性机理研究。 E-mail:mxzhang@dlut.edu.cn
张明霞。
[责任编辑:卢圣芳]
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
船海工程(2021年6期)2021-12-17
海洋技术学报(2020年5期)2021-01-14
船舶标准化工程师(2020年1期)2020-06-12
阅读(快乐英语高年级)(2020年2期)2020-04-14
山西文学(2019年9期)2019-11-01
船海工程(2019年3期)2019-07-03
百科探秘·海底世界(2019年3期)2019-04-03
舰船科学技术(2018年8期)2018-09-02
船舶标准化工程师(2015年5期)2015-12-03
