基于电动系统的机械负载动力学模拟控制
2012-07-20 04:00李宗帅王修岩
微特电机 2012年1期
李宗帅,王修岩,乔 辉
(中国民航大学,天津300300)
0 引 言
电动机是现代工业、国防等行业中非常重要的执行机构,它在实际应用中所承担的机械负载具有复杂化、多样化的特点。随着科技不断的进步,一方面对于生产过程的控制要求越来越高,电动机所承载的机械负载越来越复杂,对其进行高精度的控制,需要采用先进的控制策略,然而采用现场试验的方法研究控制算法是不现实的,危险性和成本都比较高,采用纯理论仿真研究,又难免会脱离真实的物理实际;另一方面,对电动机的性能要求越来越高,需要有对电动机进行测试的设备。因此,我们需要一种能够对实际应用中机械负载进行模拟的系统,用于满足离线控制算法研究和电动机性能测试的设备,电动负载模拟系统能够满足以上两个方面的要求。
目前,国内外很多学者在基于电动系统的负载模拟控制和应用方面做了大量的研究工作。文献[1]中电动负载模拟系统是由两台同轴相连的电机构成,一套为被测电机,另一套为负载模拟电机,通过对负载模拟电动机进行控制,使其为被测电机提供各种实际应用中的机械负载。文献[2-4]也是基于电动系统的负载模拟装置,提出了能够模拟机械负载动态性能的负载模拟电动机控制算法,实验和仿真结果均证明该控制算法是有效的。文献[5]采用两台电机同轴相连的方式,建构二自由度机器人手臂的非线性负载模拟的半实物仿真系统。文献[6]给出了一套测试电梯曳引电动机的系统,驱动电机为曳引电动机,采用一套直流电机来模拟电梯曳引电动机的负载。文献[7]提出采用电动负载模拟系统用来模拟风力机风轮的动态特性,用于帮助设计和测试实际的风力发电系统。文献[8]介绍了用于测试潜艇驱动电机的负载模拟系统,它以一台直流发电机为负载模拟电机,模拟潜舰负载。
目前大多数应用到实际系统之中的多局限于机械负载的静态模拟,对于动态模拟还不多。并且模拟的负载多是线性负载的静态模拟,对于非线性的研究还有待深入。本文就基于电动系统的线性和非线性机械负载的动力学模拟进行研究。
1 负载模拟系统的模型
系统的总体结构如图1所示,驱动电机和负载模拟电机同轴连接,其中驱动电机是三相交流电机,加载电机为一台可以四象限运行的直流电机。通过对模拟电机进行控制,使其为驱动电机提供负载,完成对驱动电机的测试或者驱动电机伺服控制算法的研究。
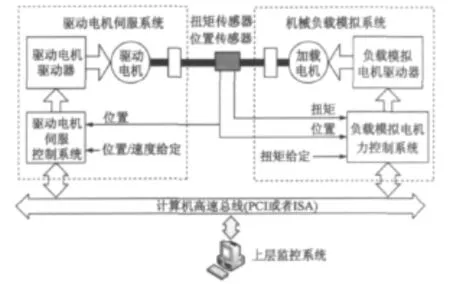
图1 系统总体结构框图
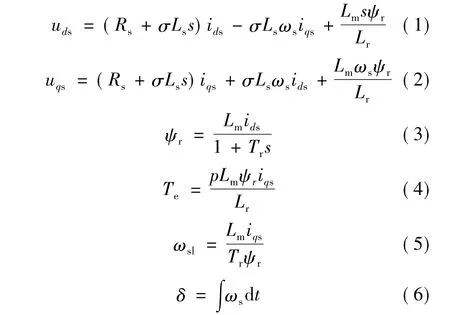
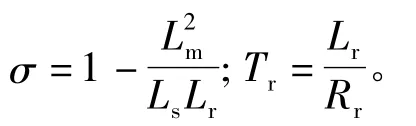
由于驱动电机采用三相异步电机,为了取得良好的伺服控制效果,对其采用矢量控制,得出驱动电机控制数学模型。
当交流电机带动直流电机运动时,系统动力学方程如下:

式中:Jd为驱动电机转动惯量;Jl为负载模拟电机转动惯量;Je为编码器的转动惯量;Bd为驱动电机的粘性摩擦系数;Bl为负载模拟电机的粘性摩擦系数。一般情况下,编码器的转动惯量远小于电机的转动惯量,可忽略不计。因此可得系统逆动力学模型的传递函数:

2 负载模拟电机控制算法
文献[1]指出实际系统中的很多机械负载,它们的阻力矩与其转速之间存在一固定的关系,可以用下式来表示:

式中:a为恒定的转矩;J为转动惯量;B为粘性摩擦系数;b和c分别为速度平方和速度三次方的系数。
通过控制负载模拟电机使其模拟机械负载,则要求驱动电机驱动负载模拟电机的响应,应该等同于驱动电机驱动真实的机械负载一致,因此可得负载模拟电机的参考转矩,如下:

对于负载模拟电机的控制,目前多数采用如图2所示的直接控制方法。

图2 负载电机直接控制方法
这种控制方法的特点是简单,但是精度较差。文献[1]提出了一种负载模拟电机转矩反馈的控制策略,通过转矩传感器测出轴上的转矩,这种方法能够提高测量精度和控制精度,该方法的结构如图3所示,本文采用该种控制算法。
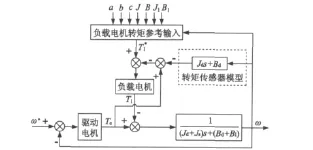
图3 带转矩反馈的控制算法
3 仿真研究
交流电机的参数:定子电阻0.435 Ω,电感2 mH,互感70 mH,转子电阻 0.816 Ω,电感 2 mH,转动惯量0.089 kg·m2,粘性摩擦系数0.005 N·m·s。直流电机参数:转动惯量0.05 kg·m2,粘性摩擦系数为0.01 N·m·s,电枢电阻 0.78 Ω,电枢电感0.016 H。
3.1 线性负载模拟实验

从仿真实验曲线可见,驱动电机的定子电流波形是正弦波,谐波较小,控制效果理想;电机的实际速度能够跟踪给定速度的变化;负载电机转矩的变化同速度的变化趋势基本一致,控制效果理想,实现了对于线性负载的模拟。
3.2 非线性负载模拟实验
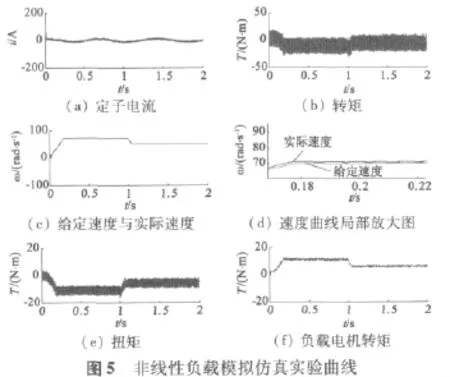
从图5仿真实验曲线可见,对于非线性负载,驱动电机的定子电流波形也是正弦波,控制效果理想;电机的实际速度能够跟踪给定速度的变化,在1 s时,通过降低转速测试系统的动态特性,发现驱动电机和负载电机转矩都能够按照预期的规律变化;负载电机转矩的变化同速度的变化趋势基本一致,控制效果理想,实现了对于非线性负载的模拟。
4 结 语
本文针对基于电动系统的机械负载模拟控制研究问题,给出了系统的总体结构,采用带转矩反馈的控制算法进行控制研究。分别对线性机械负载和非线性机械负载进行仿真实验,从仿真结果可以看出,所采用的控制算法能够实现对于线性和非线性机械负载的模拟,具有较好的鲁棒性。
[1] Sandholdt E,Ritehie E,Pedersen J K,et al.A dynamometer performing dynamical emulation of loads with nonlinear friction[J].Proceedings of the IEEE International Symposium on Industrial E-lectronics,1996,2:873 -878.
[2] Hakan A Z,Asher G M,Clare J C.Dynamic emulation of mechanical loads using a vector-controlled induction motor-generator set[J].IEEE Transactions on Industrial Electronics,1999,46(2):370-379.
[3] Akpolat H Z,Asher G M,Clare J C.A practical approach to the design of robust speed controllers for machine drives[J].IEEE Transactions on Industrial Electronics,2000,47(2):315 -324.
[4] Arellano - Padilla J,Asher G M,Sumner M.Control of an AC Dynamometer for Dynamic Emulation of Mechanical Loads with Stiff and Flexible Shafts[J].IEEE Transactions on Industrial Electronics,2006,53(4):1250 -1260.
[5] Temeltas H,Gokasan M,Bogosyan O S.A nonlinear load simulator for robot manipulators[C]//The 27th Annual Conference of the IEEE.Industrial Electronics Society,2001:357 -362.
[6] Ryu H M,Kim S J,Sul S K,et al.Dynamic load simulator for high-speed elevator system[C]//Power Conversion Conference.Osaka,2002:885 -889.
[7] 吴捷,许燕灏.基于异步电动机的风力机风轮动态模拟方法[J].华南理工大学学报,2005,33(6):46 -49.
[8] 陈永军,黄声华,翁惠辉,等.潜艇驱动电机负载特性仿真系统研制[J].电气传动,2006,36(2):55 -58.
[9] Ma Z,Zheng T,Lin F.Research on Reciprocal Power- fed AC Drive Test Rig for Electric Traction Applications[J].Proceedings of the Eighth International Conference on Electrical Machines and Systems,2005,3:1873 -1876.
[10] 李宗帅,董春,刘颜.国内外电力测功机发展现状[J].电机与控制应用,2007,34(5):1 -4.
[11] 杨家强,黄进.一种基于PWM整流器和异步电机直接转矩控制的新型动态电力测功[J].仪器与仪表学报,2005,26(1):1224-1228.
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28
防爆电机(2021年3期)2021-07-21
高师理科学刊(2020年2期)2020-11-26
四川工商学院学术新视野(2020年2期)2020-08-13
纺织科学研究(2020年1期)2020-05-21
电子制作(2018年1期)2018-04-04
制造技术与机床(2017年6期)2018-01-19
电子制作(2017年23期)2017-02-02
医学教育管理(2015年4期)2015-12-01
舰船科学技术(2015年8期)2015-02-27