基于偏差耦合的反演自适应滑模同步控制
2012-07-23 06:36彭晓燕范志龙
微特电机 2012年5期
彭晓燕 ,范志龙
(湖南大学,湖南长沙410082)
0引 言
分布造纸机、起重机、印染机械等控制系统中同步技术广泛存在。而电动机作为同步控制系统中的主要驱动设备,在实际应用中,各电动机的同步性能会因外部扰动、各传动轴的驱动特性不匹配及电动机在运行过程中的绕组温升等因素的影响而变差,从而降低了系统的精确度和稳定性。因此,系统同步的核心是同步控制,同步控制策略的优劣能直接影响系统的可靠性和控制精确度[1]。
传统的同步控制多采用精确度不高的主从控制策略,它在稳态时同步性能较好,但在起动停止和外部干扰时会造成很大的同步误差[2]。为了满足现代工业的要求,Koren[3]提出交叉耦合控制策略,但是当同步电机数目大于2时,由于交叉耦合控制的速度补偿信号难以确定而不适用[4]。2002年Shih等人提出了相邻交叉耦合控制策略,即每台电机的控制仅考虑相邻两电机的状态,但当某台电机受到负载扰动的情况下,它只能通过相邻电机逐个传递给其它电机,这将导致控制延时,从而造成同步误差。而 Perez—Pinal.F[5]等提出了适用于电机数目多于2的偏差耦合控制,它是通过改进交叉耦合控制而得来的,其改进之处在于每台电机速度补偿信号是通过各个电机状态反馈得到的。这种控制策略能够克服其它控制策略的缺点,具有很好的同步性能。
一般控制算法是依靠其系统的精确模型得到的,而永磁同步电动机在运行过程中的精确模型很难得到,因此鲁棒性无法达到控制系统的要求。而滑模变结构对系统参数不确定性以及负载扰动等影响因数具有较强的鲁棒性,许多学者把其运用到控制系统中,取得了很好的效果[6-7]。本文应用自适应估计不确定上界的扰动,结合反演设计,设计了一种基于反演的自适应滑模控制器,将滑模控制和反演设计方法相结合,即可以简化反演设计方法的设计,又增加了系统对不确定性的鲁棒性,削弱了滑模控制带来的抖振。同时对五台电机同步控制系统进行了仿真实验,仿真结果证明了本文算法的有效性。
1偏差耦合控制策略
偏差耦合控制的速度补偿信号是由一台电动机的速度反馈与其它的电动机速度反馈的偏差乘以相应的增益后再相加得到。乘以增益是用来补偿各个电动机之间的转动惯量的不同,各个速度补偿器的反馈放大增益,可以通过其对应电机的转动惯量求得[8]。其结构示意图如图1所示。由图1可以看出,偏差耦合控制中最重要的部分就是速度反馈模块,它给每台电机提供速度补偿信号。速度补偿器结构如图2所示,它的作用如同“虚拟地”一样,将每台电机在过渡周期和转矩扰动时的相对速度归零。图中:K11、K12为速度反馈耦合增益。

图1 三台电机偏差耦合控制系统结构图

图2 速度补偿器结构图
2基于反演设计的自适应滑模控制器设计
反演设计的基本思想是将复杂的非线性系统分解成不超过系统阶次的子系统,然后为每个子系统分别设计李亚普诺夫函数和中间虚拟控制量,一直“退到”整个系统,直到完成控制律的设计[9]。本文把滑模控制和反演设计相结合设计了控制器,为了避免不确定性的上界,采用自适应算法对其进行了估计。
以五台电机为例,为实现其同步控制,设计基于反演的自适应滑模控制器。
永磁同步电动机采用id=0的矢量控制方法。将永磁同步电动机的动态方程改写:

由上述的偏差耦合控制策略可得五台电机校正后的跟踪误差:

则控制器设计步骤如下:
步骤一:五台永磁同步电动机的动态方程:

令

对式(4)求导得

取虚拟控制量αi=cizi1,ci为正的常数。
定义李亚普诺夫函数:

定义:

对式(6)求导可得:

步骤二:对式(7)求导可得:

定义李亚普诺夫函数:

式中:si为切换函数。
定义滑模控制切换函数:

式中:ki>0。
对式(10)求导可得:
步骤三:设计自适应反演滑模控制器:

式中:hi和γi为正常数,为不确定参数的上界估计值。
定义李亚普诺夫函数:

设计自适应律:

将式(13)和式(16)代入式(15),得:

取

则:
将式(19)代入式(17)得:

因为

所以

因此可知,系统在李亚普诺夫意义下是渐近稳定的。
由于UP=iq,所以同步控制系统的控制器输出:
3仿真及分析
3.1仿真参数设置
为了验证上述控制器的稳定性,以五台永磁同步电动机的同步控制系统为例进行了仿真实验。五台电机模型在d-q旋转坐标系下的各主要参数设置如表1所示,五台电机的初始负载转矩都是1 N·m,给定的参考速度 ω*(t)=41.9 rad/s,仿真时间 t=1.8 s,在 t=1.0 s时,五台电机中的第 1、3、5这三台电机的初始负载转矩分别突变为2 N·m、4 N·m、6 N·m。由于 h、c、k 取值满足式(21),本文取 h=2 000,c=70,k=50,同时取 λ =30,γ =1.5。
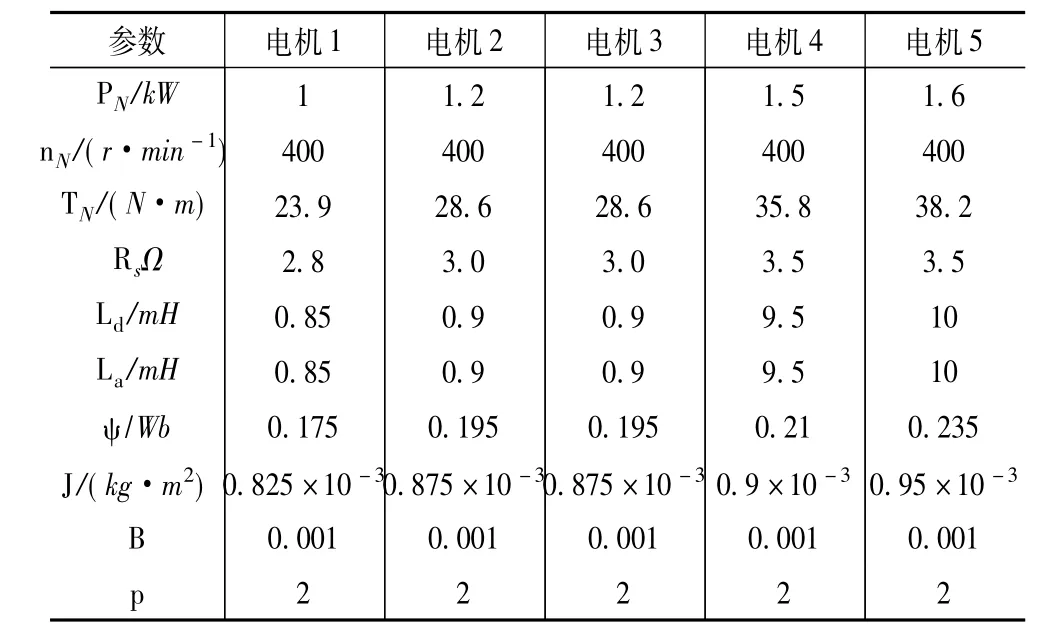
表1 五台电机的参数设置
3.2 实验结果
(1)实验1
以五台永磁同步电动机控制为例,选择偏差耦合控制策略和主从控制策略进行仿真对比试验,以证实偏差耦合控制策略的优越性。

图3 主从PID控制的跟随和同步误差曲线
采用主从控制策略和偏差耦合控制策略的PID同步控制跟踪误差及同步误差仿真结果如图3和图4所示。由图3可见,在电机起动时刻,偏差耦合控制的跟随误差小,并且跟随误差能够同时近乎为零。在负载突变时,每台电机的速度突变的范围相对较小,同时每台电机的速度突变之差也相对较小。此外,偏差耦合控制在初始时刻的同步误差相对较小,并且能够较快地达到稳态,在负载突变时,偏差耦合控制系统同步误差也能够保持在很小的范围,而主从控制不相邻电机的同步误差很大。
(2)实验2
采用偏差耦合策略,选择基于反演的自适应滑模控制算法和PID控制算法进行仿真对比。在其他情况都相同时,上述两个控制器的跟踪误差及同步误差仿真结果图4和图5所示。从图4可以得到,基于反演设计的自适应滑模控制在开始时刻能够快速跟踪目标速度。在负载突变时,能够快速重新准确跟踪目标速度,控制器表现出了很好的自适应性和鲁棒性;同时,从图5可以看出,基于反演设计的自适应滑模控制在开始及达到稳定时同步误差都很小。在负载突变时,该系统的同步精度依然较高,体现了较好的抗干扰性。

图4 偏差耦合PID控制的跟随误差和同步误差曲线
4结 语
本文针对多电动机系统所存在的负载扰动、参数变化等影响因素,采用偏差耦合控制策略,利用反演设计和滑模控制相结合,设计了一个多电动机同步控制系统,并进行了仿真对比。仿真结果表明该系统对负载扰动和参数变化带来的影响具有较好的抑制作用,证明了该系统的具有较好的抗干扰性和鲁棒性。

图5 偏差耦合基于反演的自适应滑模控制的跟随误差和同步误差曲线
[1] 刘福才,王学莲.多级电机传动系统的同步控制理论与应用研究[J].控制工程,2002,9(4):87-97.
[2] 张承慧,石庆升,程金.一种基于相邻耦合误差的多电机同步控制策略[J].中国电机工程学报,2007,27(15):59-63.
[3] Koren Y.Cross-coupled biaxial computer controls for manufacturing systems[J].Transaction of ASME,1980,102(4):265-272.
[4] Francisco J,Ciro N,Ricardo A,et al.Comparison of multi-motor synchronization techniques[C]//Institute of Electrical and Electronics Engineers Computer Society.The 30th Annual Conference of the IEEE industrial Electronics Society,Busan,2004.NJ:IEEE,2004,2:1670—1675.
[5] Perez-Pinal F J,Nunez C,Alvarez R.Compassion of multi-motorsynchronization techniques[C]//The 30th Annual Conference of me IEEE industrial Electronics Society.Busan,Korea,2004,10:2-6.
[6] 高为炳.变结构控制的理论及设计方法[M].北京:科学出版社,1996.
[7] Taylor D G.Nonlinear control of electric machines:An verview[J].IEEE Control Syst Mag(S0272—1708),1994,14(6):41-51.
[8] Perez-Pinal F J,Calderon G.Relative coupling strategy[C]//IEEE International Electric Machine and Drives Conference.2003,2(6):1162-1166.
[9] 周国荣,李永丰.永磁同步电机的自适应滑模变结构控制[J].控制工程,2009,16(1):49-51.
猜你喜欢
中等数学(2022年5期)2022-08-29
防爆电机(2021年4期)2021-07-28
上海大中型电机(2021年2期)2021-07-21
中等数学(2020年2期)2020-08-24
中国惯性技术学报(2019年6期)2019-03-04
北京航空航天大学学报(2017年4期)2017-11-23
北京航空航天大学学报(2016年7期)2016-11-16
信息记录材料(2016年4期)2016-03-11
北京航空航天大学学报(2016年4期)2016-02-27
智能建筑电气技术(2015年5期)2015-12-10