基于改进扰动法的光伏电池MPPT仿真研究
2012-08-01 12:49苏义鑫向炉阳张丹红
武汉理工大学学报(信息与管理工程版) 2012年2期
苏义鑫,向炉阳,张丹红
(武汉理工大学自动化学院,湖北 武汉 430070)
太阳能光伏电池已广泛运用于照明路灯、水泵、家用电器、发电厂和卫星能源等诸多领域,成为新能源研究的热点。
目前用于光伏电池最大功率点跟踪(MPPT)的方法主要有:恒定电压法(constant voltage tracking,CVT)、扰动观察法、电导增量法、最优梯度法、间歇扫描法、模糊逻辑控制法和神经元网络控制法等[1]。恒定电压法实现简单,但在温度突变下输出功率将会偏离最大功率点,甚至产生振荡。文献[2]对CVT算法做了改进,通过经验查表法能够提高MPPT的控制效果。扰动观察法实现简单,但步长难以确定且在最大功率点处会发生振荡[3]。电导增量法利用光伏电池在MPPT处输出功率对电压的导纳为零来跟踪最大功率点,该方法控制效果好,控制稳定度高,但是控制算法复杂,对采样的精确度要求较高[4]。文献[5-9]把模糊控制应用到光伏电池的MPPT控制中,实验结果表明,该算法在外部环境变化时能快速响应,但模糊控制是有差控制,在最大功率点附近仍有振荡。神经元网络控制具有良好的鲁棒性和较快的响应速度,但算法实现复杂[10]。针对上述MPPT控制算法的不足,结合现有MPPT算法的优点,提出了一种基于模糊-PI控制的占空比扰动法,并建立了系统仿真模型,仿真结果表明,该算法具有一定的优越性。
1 光伏电池的等效模型及其输出特性
1.1 光伏电池的等效电路
光伏电池是以半导体PN结接收太阳光照产生光伏效应为基础,将光能转换为电能的装置。其单体等效电路相当于一个电流源并联一个二极管,如图1所示。其中Ig为光生电流,其值正比于光伏电池的面积和入射光的辐照度;Id为暗电流,用二极管的电流表示;Ish为流过旁路电阻的电流;Io为光伏电池输出电流;Uo为光伏电池输出电压;Rsh为旁路电阻;Rs为串联电阻;Ro为电池的负载电阻。
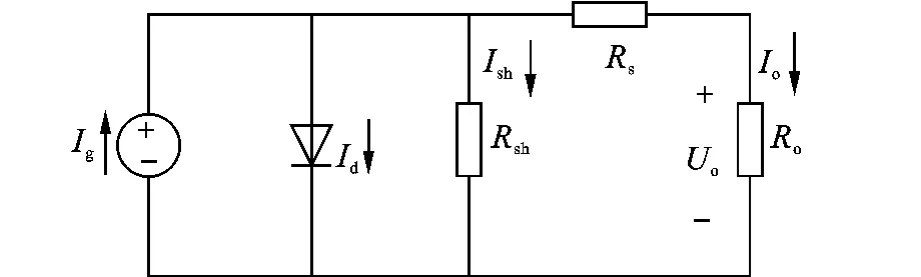
图1 光伏电池的等效电路
由上述定义,根据基尔霍夫电流定律和光电子学理论可以推导出光伏电池的等效数学模型:
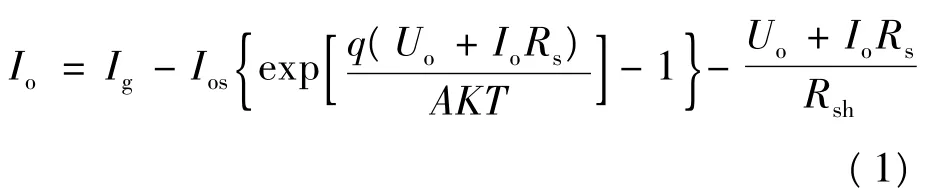
式中:Ios为太阳能板的逆向饱和电流;q为电子电荷量1.6×10-19C;K为波尔兹曼常数,其值为1.38×10-23;A为PN结曲线常数,这里取为1;T为温度。
由于串联的Rs很小,并联的Rsh很大,Ish→0,因此进行理想电路计算时都可以忽略不计[11]。
由于单个光伏电池输出的功率较小,实际应用的太阳能电池基本上都是由若干单个光伏电池并联或串联所组成的光伏阵列。太阳能电池相互串联可以提高光伏阵列的输出直流电压,并联组合可以提高光伏阵列的输出直流电流。因此,通过对太阳能电池串、并联交替组合可以得到期望的输出电压、电流和功率,从而可得到太阳能电池模组的I-U特性方程为:

其中,np为太阳能电池模组中并联电池单元的个数,ns为太阳能电池模组中串联电池单元的个数。光伏阵列的单体电池串联个数为36,并联个数为0。
1.2 光伏电池的仿真模型
在温度、光照条件变化时光生电流表达式为:

式中:Isc为短路电流;G为光照强度;Gmon为标准条件光照强度;T为光伏电池表面温度;T1为298 K;T2=273+75=348 K。
电池组件Solarex MSX60 60 W的参数如表1所示。由式(3)可计算出温度为T时光生电流为:

在外部负载短路时,由表1可知Io=0,Uo=Uoc=21.1 V,将表1中参数代入式(2),可计算出Ios的值,再将Ios的值代入式(2)可得出负载电流表达式。电池内阻计算可得Rs=0.504 6 Ω。

表1 电池组件Solarex MSX60 60W的参数
由式(4)可得到任意光照强度S和电池环境温度T条件下的硅太阳能电池简化数学模型,利用Matlab/Simulink建立的光伏电池仿真模型如图2所示。
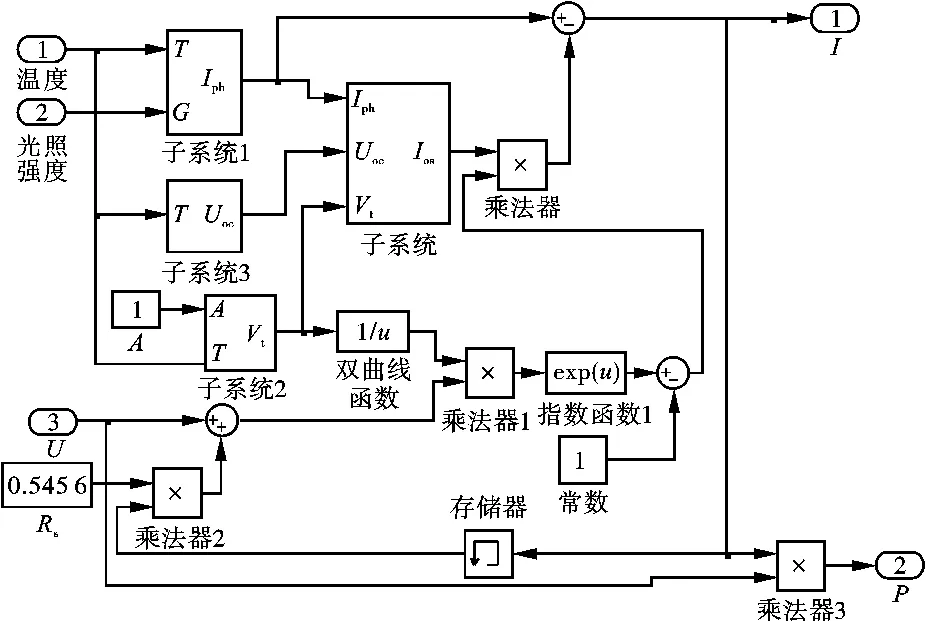
图2 光伏电池仿真模型
1.3 光伏电池的特性曲线
根据仿真模型,调节负载电阻的大小进行采样,将采样数据进行曲线拟合,当光照和温度变化时光伏阵列的I-U特性曲线和P-U特性曲线如图3所示。由图3比较分析可知,在光照条件不变的情况下,光伏电池的开路电压随温度的升高而降低,短路电流随温度的升高而略有增加,最大输出功率随温度的升高而略有降低。在温度不变的条件下,光伏电池的开路电压随光照的降低而降低,短路电流和光照幅度成正比,最大输出功率随光照幅度的升高而剧增。
2 MPPT原理和占空比扰动法设计
由光伏阵列在不同的光照、温度条件下输出的功率电压特性可知,每条曲线都存在一个最大功率点,且其在当前环境条件下是唯一的。
目前比较常用且简单的一种MPPT实现方法是干扰观测法,其原理是每隔一定的时间加一个电压扰动,并观测其后的功率变化方向,根据功率增加的方向来决定扰动的方向。该方法采用反馈控制,分为电压扰动法和电流扰动法。用第n时刻P(n)与第n-1时刻的采样值P(n-1)差值是否大于零来判定光伏电池是否工作在最大功率点处。如果是,则保持扰动方向;否则改变扰动方向。根据上述思想,建立了占空比扰动法的仿真模型,如图4所示。Vin和Iin分别为采样的电压和电流,零阶保持器的采样间隔设置为0.001 s,Repeat Sequence的周期设置为0.005 s,幅值为[-2,2],可以产生波形稳定占空比可调的矩形脉冲,仿真模型的仿真时间设置为0.1 s。占空比扰动法最大仿真步长难以确定,根据经验,分别设置为0.000 01和0.000 10,可以取得较好的控制效果。通过多次仿真实验可知,在仿真中如果采用较大步长进行干扰,可以获得较快的响应速度,但达到稳态后功率在最大功率点小范围内振荡;采用较小的步长使得跟踪速度过慢,在外界环境剧烈变化情况下可能发生误判。
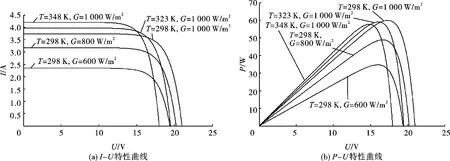
图3 光伏组件的I-U特性曲线和P-U特性曲线

图4 占空比扰动法仿真模型
3 基于模糊-PI控制占空比扰动法的设计
3.1 模糊-PI双模控制系统结构
针对占空比扰动法的不足,对其做出改进,加入了模糊控制和PI控制器兼顾其动态性能和稳态精度。模糊-PI控制占空比扰动法的原理如下:在大偏差范围内采用模糊控制进行快速响应调整,在小偏差范围内的精度调整采用常规PI控制,模糊-PI双模控制的系统结构如图5所示,图5中表达式为设定的模糊控制器和 PI控制器的转换开关,当满足时采用 PI控制,此外采用模糊控制。
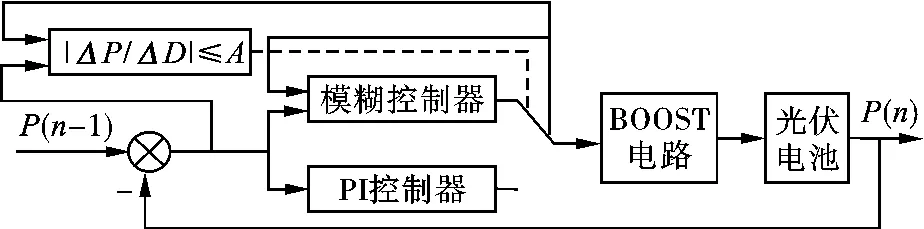
图5 模糊-PI双模控制系统结构图
3.2 模糊控制器的设计
(1)模糊控制器的输入变量和输出变量的选取。模糊控制器第k时刻的输入量为系统第k时刻功率值的变化量ΔP和第k-1时刻占空比的步长变化量ΔD(k-1),第k时刻的输出量为第k时刻的占空比步长变化量ΔD(k)。
(2)输入量、输出量的模糊子集和论域的确定。将功率变化量ΔP(k)和占空比步长ΔD(k)分别用量化因子量化,然后映射到模糊集合论域Ep和Ed,再分别定义为以下的模糊子集,Ep={NB,NM,NS,ZO,PS,PM,PB},Ed={NB,NM,NS,PS,PM,PB},其中,NB、NM、NS、ZO、PS、PM、PB分别表示的模糊概念为:负大、负中、负小、零、正小、正中、正大。ΔP的论域取为{-6,+6},ΔD(k-1),ΔD(k)的论域均为{ -10,+10}。
(3)隶属度函数。根据光伏发电系统的输出特性,同时为了使模糊化算法简单,提高控制实时性,取三角形和梯形为模糊集合的隶属度函数,便于提高分辨率和灵敏度。ΔD和ΔP的隶属度函数分别如图6和图7所示。
(4)模糊控制规则和解模糊方法。根据仿真试验对模糊规则进行调整得到的最终控制规则如表2所示。对于给定ΔP(n-1)和ΔD(n-1),模糊控制器通过 Mamdani极大极小值推理法进行推理得到ΔD(n),解模糊采用面积中心法。
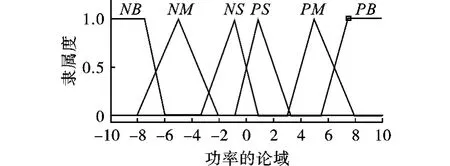
图6 ΔD的隶属度函数
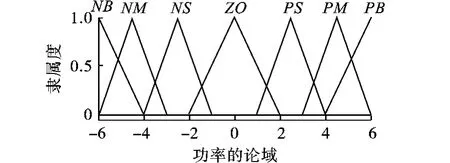
图7 ΔP的隶属度函数
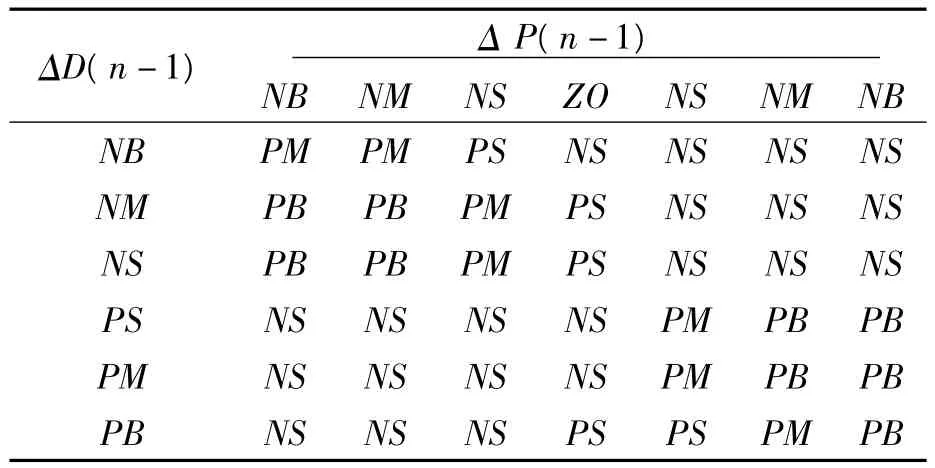
表2 模糊控制规则表
3.3 模糊-PI控制原理
模糊控制算法具有良好的精度与自调整能力,但是最大功率点附近振荡的问题依然没有得到较好的解决,造成一定的能量损失,影响整个系统的稳定性和转换效率。为了解决该问题,在模糊控制的基础上,引入稳定性和快速性良好的PI控制,由开关函数来进行两种控制方式之间的切换。PI控制器具有良好的消除稳态误差的作用,因此将其与模糊控制器结合构成复合控制器能够极大改善系统的性能。根据经验,中,A取0.06,PI控制器的参数整定采用试凑法。
3.4 模糊-PI控制仿真图
通过Matlab的Fuzzy Logic工具箱可以建立模糊子系统。采用模糊控制算法通过占空比来调整最大输出电压的同时,需要考虑占空比调整的步长。步长过大,输出功率波动加大,精度达不到要求,稳态误差变大;步长过小,跟踪时间长,易在最大功率点附近反复振荡,系统动态性能变差。因此,可利用模糊控制器来调整占空比,使其最终实现自动寻优的效果[12]。设计了模糊-PI控制算法的占空比D自动调节的子系统,其仿真图如图8所示。根据论域和变量实际取值范围,ΔP和ΔD比例因子分别取为0.10和0.01,仿真时间设置为0.01 s,最大仿真步长为0.000 01 s,延时时间为0.000 02 s。通过多次仿真实验得出,当比例系数kp=0.01,积分系数ki=1时,PI控制器能够达到较好的控制效果。
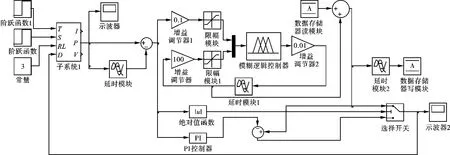
图8 模糊-PI控制仿真图
4 仿真结果分析
设定初始环境条件G=1 000 W/m2,T=298 K,在t=0.05 s时光照强度突变G=600 W/m2,在t=0.005 s时光照强度突变G=600 W/m2。占空比扰动法系统的功率输出曲线如图9所示,模糊控制法曲线如图10所示,加入了模糊-PI控制系统的输出功率跟踪曲线如图11所示,图10和图11右上部为纵轴局部放大的结果。将占空比扰动法和加入模糊-PI扰动法分别应用于光伏组件最大功率点跟踪。通过仿真对比发现,两种方法均能跟踪系统最大功率点,占空比扰动法响应速度慢,只适合光照强度变化缓慢的场合,稳态情况下,会导致光伏电池的实际工作点在最大功率点的附近振荡,造成功率的损失。模糊-PI控制方法,能够有效地提高动态特性和精度,快速地跟踪最大功率点,消除系统在最大功率点处的振荡,稳定性较好。实验结果表明模糊-PI控制具有良好的动态性能和稳态性能,优于传统的扰动观察法和普通的模糊控制方法。

图9 功率输出(采用占空比扰动法) 图10 功率输出(采用模糊控制) 图11 功率输出(采用模糊-PI控制)
5 结论
为研究光伏电池的最大功率点跟踪算法,建立了光伏电池的仿真模型并分析了其特性曲线。针对占空比扰动法的不足,结合常用的MPPT算法,将模糊-PI控制应用到光伏电池MPPT中。该方法在外界环境变化剧烈的情况下,可快速跟踪光伏电池的最大功率点,同时可基本消除最大功率点的功率振荡现象,具有较高的控制精度和稳定性,控制效果明显优于占空比扰动法。
[1] 赵争鸣,刘建政,孙晓英,等.太阳能光伏发电及其应用[M].北京:科学出版社,2005:11-13.
[2] 熊远生,俞立,徐建明,等.固定电压法结合扰动观察法在光伏发电最大功率点跟踪控制中应用[J].电力自动化设备,2009,29(6):85-88.
[3] 朱铭炼,李臣松,陈新,等.一种应用于光伏系统MPPT的变步长扰动观察法[J].电力电子技术,2010,44(1):20 -22.
[4] 叶满园,官二勇,宋平岗,等.以电导增量法实现MPPT的单级光伏并网逆变器[J].电力电子技术,2006,40(2):30 -32.
[5] CHEN J M,CHEN L.Study of photovoltaic maximum power point tracking techniques[J].Science Technology and Engineering,2009(17):4940 -4945.
[6] 陈俊,惠晶.基于模糊控制策略的光伏发电MPPT控制技术[J].现代电子技术,2009,32(6):182-185.
[7] 戴晨骏,王宏华.基于模糊控制的光伏阵列MPPT仿真[J].机械制造与自动化,2010,39(2):136-138.
[8] LARBES C,CHEIKH S M A,OBEIDI T,et al.Genetic algorithms optimized fuzzy logic control for the maximum power point tracking in photovoltaic system[J].Renewable Energy,2009,34(10):462 -467.
[9] KOTTAS T L,BOUTALIS Y S,KARLIS A D,et al.New maximum power point tracker for PV arrays using fuzzy controller in close cooperation with fuzzy cognitive networks[J].IEEE Transactions on Energy Conversion,2006,21(3):793 -803.
[10] 张岚,张艳霞,郭嫦敏,等.基于神经网络的光伏系统发电功率预测[J].中国电力,2010,43(9):75 -78.
[11] 司传涛,周林,张有玉,等.光伏阵列输出特性与MPPT控制仿真研究[J].华北电力,2010(2):248-252.
[12] 孙晓玲,惠晶.基于自适应模糊PID算法的光伏系统 MPPT控制[J].现代电子技术,2010,33(22):181-183.
猜你喜欢
数学物理学报(2022年4期)2022-08-22
成都信息工程大学学报(2021年5期)2021-12-30
北京航空航天大学学报(2021年7期)2021-08-13
中国惯性技术学报(2020年2期)2020-07-24
数学物理学报(2019年4期)2019-10-10
贵州师范学院学报(2016年3期)2016-12-01
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
北京航空航天大学学报(2016年12期)2016-02-27