沉管隧道管节浮运操纵运动模拟
2012-08-22 11:05季沈华陈锦标肖英杰
科技视界 2012年32期
季沈华 陈锦标 肖英杰 周 伟
(1.上海海事大学商船学院 中国 上海 200135;2.航运仿真技术教育部工程研究中心 中国 上海 200135)
0 引言
近年来,沉管隧道以其独特的优势发展迅猛。管节的浮运又是整个岛隧工程中至关重要的环节。一般来说管节浮运面临的几个重大的瓶颈是管节尺寸较大、多艘拖轮共同拖航操控较难、施工水域水深有限制、水上交通繁忙、海况复杂等。管节浮运操控试验的研究可以保障浮运过程的安全进行,减少人力资源和资金的消耗浪费,对整个工程的建设有较大的意义。本文主要研究沉管隧道管节的模型建立和仿真并对模型的误差进行分析。
1 项目背景
本文以港珠澳沉管隧道工程为背景,研究管节在航道、转向区、基槽内浮运的操控性。港珠澳大桥,跨越珠江口伶仃洋海域,是集路、桥、
岛、隧为一体的工程。全长49.968公里,总投资为729.4亿(追加至
900亿)。港珠澳大桥岛隧工程是港珠澳大桥主体工程技术最复杂、建设难度最大的部分。为适应沉管隧道各部分管节顺利浮运与沉放,工程预制两条浮运航线,现截取其中基槽转向的某一段重点研究。
2 模型建立
基于MMG建模思想,考虑了管节尺度、拖轮性能、拖带方式、风、浪、流、浅水效应等主要因素,建立了一个包含拖船、管节的三自由度数学模型。建模的框架如下图所示。
由作用在管节上的外力及外力矩[3]代可以推出以下基本公式:

式中,m 为管节的质量,Izz为转动惯量,[u、v、r]分别为管节的横向速度、纵向速度和转艏速率;[XI、YI、NI]分别为作用于管节的纵向和横向惯性类水动力和力矩;[XH、YH、NH]分别为作用于管节的纵向和横向粘性类水动力和力矩;[XT、YT、NT]分别为拖缆的拖力、横向力和力矩;[XW、YW、NW]分别为作用于管节的纵向和横向风力和风力矩;
管节惯性水动力和力矩的计算实际上是对管节附加质量和附加惯性矩的估算,一般采用周昭明的估算公式[1],由于属于是浅水域[2]的浮运,须对系数进行浅水修正。
在研究管节浮运的过程中,考虑常速域模型和低速域模型。小漂角采用贵岛模型,大漂角采用芳村模型,采用两种模型相结合的方法计算粘性力。同样也须对涉及的系数进行浅水修正。风干涉力及力矩采用Isherwood计算。
拖轮力和力矩计算采用先计算单个拖轮的螺旋桨推力和力矩,舵力和力矩在计算单个拖轮的合力和力矩最后得出拖轮组合的合力及力矩。

图1 某拖轮对管节的作用图
设某全回转式拖轮在某运动状态下,航向角为φT左舷导管螺旋桨的偏转角度为δp右舷导管螺旋桨的偏转角度为δs,左右螺旋桨产生的推力分别为Tp、Ts可以由式(2)计算得出:

则计算单个拖轮的螺旋桨推力和力矩之后结合以上公式(2)的内容得出某单个拖轮合力的计算公式:

将浮运过程中涉及到的拖轮分别标记为第i号拖轮,则拖轮组合的合力及力矩的计算公式如下:

3 设计实现
管节拖航浮运系统包含拖轮控制、航迹显示、数据存储等模块,是管节拖航浮运仿真实验平台,能够获得航道、转向区、基槽区浮运模拟轨迹和实验数据,可直观分析拖船和管节的拖航运动过程,利用航迹推算,提供航迹预判功能。在条件允许的情况下,管节实际拖航过程中,该系统能实时接收现场风、浪、流及GPS等数据,进行现场仿真实验,为拖船的拖力使用和拖带角度提供科学依据。
3.1 系统运行流程
根据系统框架设计运行流程,如图2,主要包括:“信息输入”、“仿真实验”、“结果输出”三个部分。桌面系统采用ADO技术绑定后台数据库,自动采集实验过程中管节的经纬度、航速等动态信息和拖轮操作信息存储到ACCESS数据库中,以便数据分析。
“信息输入”:用户将设计的实验工况信息或实测数据输入系统,主要包括管节的初始位置、姿态和水文气象信息。桌面系统预留串口通性接口,用于接入外部实测数据。
“仿真试验”:用户通过控制拖轮的档位、拖带角度和长度等,操纵管节运动,使管节的运抵目的地。
“结果输出”:仿真实验结束后,选择航迹显示,可以保存管节和拖轮航迹,并测量航迹带宽度。查找复制ACCESS数据库,保存仿真实验数据。
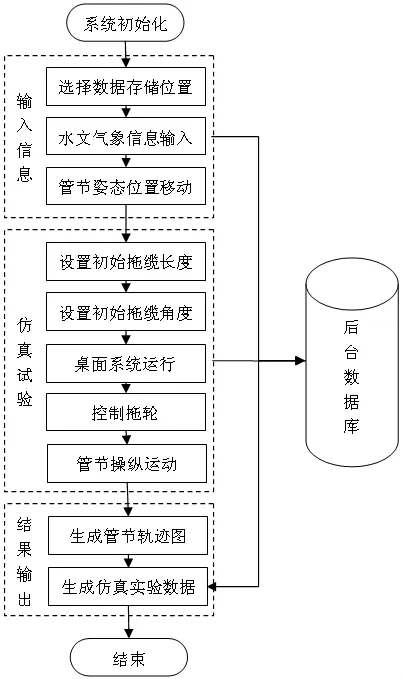
图2 系统运行流程
3.2 界面设计
该系统以电子海图为背景,用VC++编程的手法嵌入整个拖航系统的模型。下图为拖航系统的主界面。

图3 拖航系统系统的主界面
4 仿真计算及结果分析
仿真计算所使用的拖船与管节主尺度见表1,拖船的螺旋桨和舵的主要数据见表2。

表1 管节尺寸
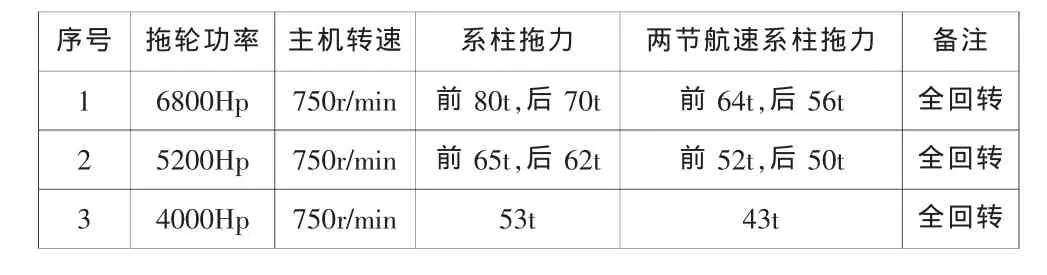
表2 拖轮性能表
主要截取航道转向区、典型航道、基槽回旋水域进行重点试验来研究整个浮运过程。将工况设置成以下几种情况,见表3。
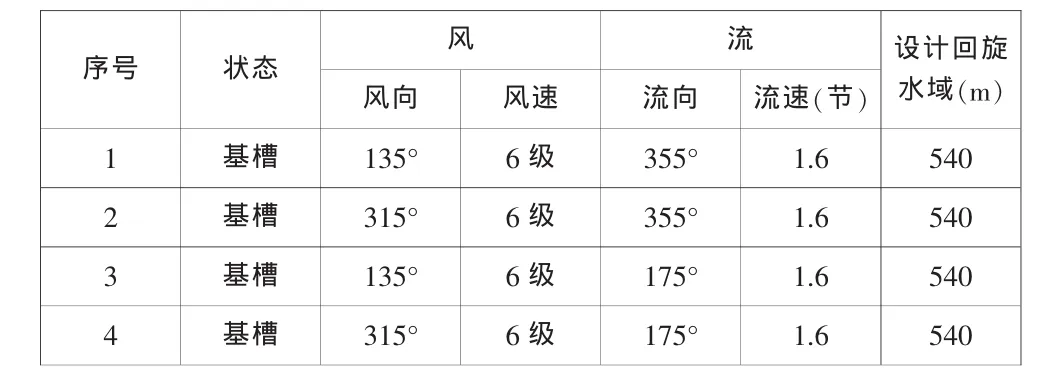
表3 回旋水域分析表
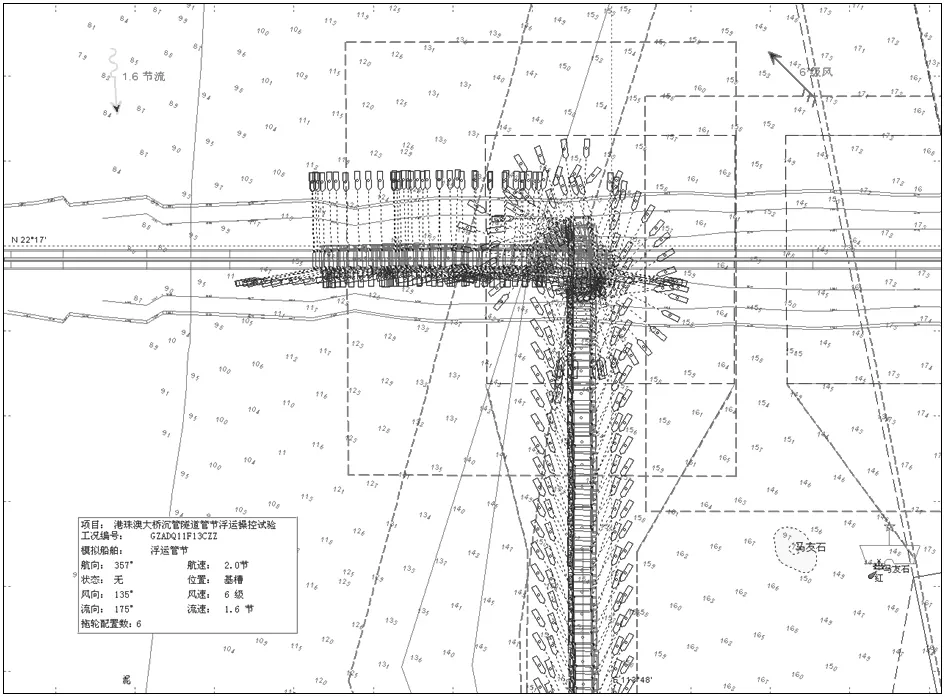
图4 管节与拖轮的基槽段向西转向轨迹图
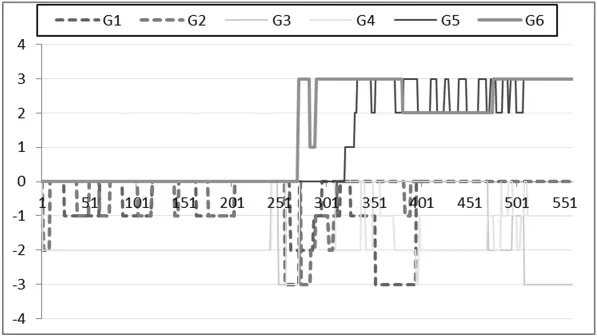
图5 拖轮的功率使用图
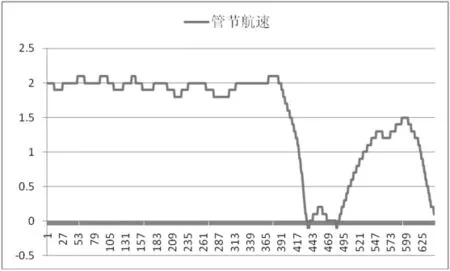
图6 管节的航速图
根据以上数据设置好管节和拖轮的参数[4-8],根据不同的工况得到管节和拖轮的航迹图,图6是拖航浮运系统在工况风向135°,风速6级,流向175°,流速1.6节的航迹图,图7拖轮的功率使用图,图8是管节的航速图。根据拖轮功率数据分析,在风流叠加的条件下,基槽回旋水域一往左转向最大拖轮累积功率为3906178kw,拖轮累积功率3570个单位;在风流抵消的条件下,基槽回旋水域一往左转向最大拖轮累积功率为2116359kw,拖轮累积功率1859个单位。实际拖航拖轮功率可以参考上述数据进行拖带。
由图6可以看出在转向之前管节的航速保持在2节左右,在转向点有一个突变的过程,在实际浮运过程中需注意拖航系统速度的变化速率,以便于控制操纵。
该系统是通过计算机仿真技术模拟管节拖航浮运过程,尽可能模拟真实的情况,但与真实情况有所不同,因此,存在一定的误差。桌面系统的误差主要包括:管节操纵运动模型误差、拖轮操作误差、水文气象信息测量误差。所以只能尽可能接近地仿真浮运过程。
5 结论
管节在复杂的海况下的运动是一种复杂的非线性运动,本文结合外界因素对管节的影响定量地分析了管节的运动过程,十分接近地仿真了管节在典型阶段的速度变化趋势和所需拖轮的功率曲线图并在系统中得出了管节运动的航迹带分布图[9],对管节浮运操控提供了理论基础同时也有助于整个操纵过程的实时模拟。
[1]周昭明,等.多用途货船的操纵性预报计算[J].船舶工程,1983,第6期.
[2]A.M.巴辛.浅水船舶流体力学[M].北京:高等教育出版社,1960.
[3]张晓兔,张乐文,刘祖源.长江沉管隧道管节的顶推操纵运动模拟[J].武汉造船.1999年,第3期.
[4]梁康乐,邓德衡,黄国棵.拖航系统操纵运动仿真[J].中国航海.2007年,第2期.
[5]张鹏.拖轮协助船舶操纵建模与仿真[D].大连海事大学,2008.
[6]张玉喜.钻井平台拖带的建模与仿真[D].大连海事大学,2010.
[7]盛子寅.浅水中船体操纵水动力导数的计算[J].中国造船,1981(73).
[8]洪碧光.船舶操纵原理与技术[M].大连:大连海事大学出版社,2007.
[9]David Clarke.The effect of shallow water on manoeuvring derivatives using conformal mapping[J].Control Engineering Practice 6,1998.
猜你喜欢
设备管理与维修(2022年21期)2022-12-28
水上消防(2022年1期)2022-06-16
水道港口(2021年6期)2021-01-25
青年歌声(2019年12期)2019-12-17
北京航空航天大学学报(2017年7期)2017-11-24
科学中国人(2017年24期)2017-01-28
北京航空航天大学学报(2016年6期)2016-11-16
舰船科学技术(2015年8期)2015-02-27
舰船科学技术(2015年8期)2015-02-27
中国港湾建设(2015年11期)2015-01-05