车载天线伺服系统技术分析
2012-10-20 02:27任金泉周洪波蔡文莉
无线电通信技术 2012年2期
任金泉,周洪波,蔡文莉
(中国电子科技集团公司第五十四研究所,河北石家庄 050081)
0 引言
车载天线伺服系统接收综控系统发送的载体坐标数据和惯性数据,进行坐标转换,计算出天线对准卫星的方位、俯仰和极化角。再与天线当前的方位、俯仰、极化的角度进行比较,通过数字校正,输出控制信号到功放,驱动天线指向目标。随着载体的移动,发送的数据实时变化,伺服系统计算出的对准卫星的角度也相应的变化,并驱动天线朝目标方向转动,达到实时跟踪卫星的目的。车载天线伺服系统采用了扩展CAN通信技术和一种安装偏差角标定技术。
1 扩展CAN通信技术
CAN总线即控制器局部网,它是一种有效支持分布式控制或实时控制的串行通信网络。具有以下突出特点:①CAN的传输速率可到1 Mbit/s;② 具有检错和纠错机制,有自动重发功能;③ 采用独特的非破坏性仲裁技术,具有CRC校验功能;④ 连线简单,可扩展性强。扩展CAN通信协议只包括数据链路层和物理层,用户可自定义应用层协议,具有很大的灵活性。
车载综控系统采用CAN总线为天线伺服系统提供位置信息和姿态信息,采用了扩展CAN通信技术。
1.1 物理特性和帧格式
伺服系统和CAN接口要求提供120 Ω终端匹配电阻。总线通信速率设置为500 kbps。
CAN通信协议约定了4种不同的帧格式,该系统中使用标准帧格式。CAN首先接收到仲裁场,根据仲裁场的内容判断所接收到的信号是哪种帧格式,用户将相应的数据写入数据场中进行发送,或从数据场中读取接收到的数据。CAN帧结构中字节1~字节5定义为控制段,用来承载通信双方的相关控制信息。CAN帧结构中的字节6~13字节定义为正文段,用来承载业务数据或者是控制信息的控制参数。
CAN2.0B扩展帧格式如表1所示。
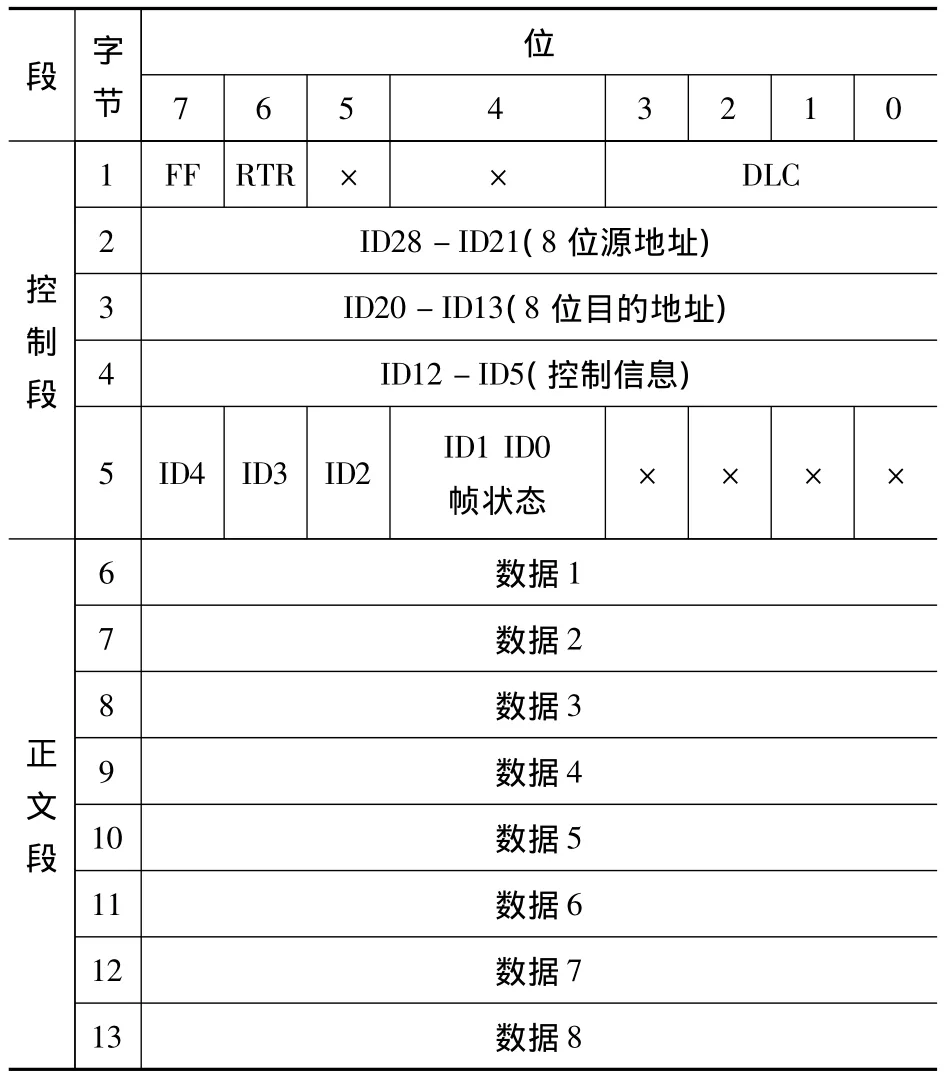
表1 CAN 2.0B扩展帧格式
1.2 控制区协议
1.2.1 CAN节点地址
综控系统各单元地址采用8 bit编址方式,综控系统CAN总线地址中,综控系统为0X01,伺服系统为0X02。在CAN帧结构中,安排下列CAN地址信息:
ID[28:21]为源地址域:数据发送方的CAN节点地址信息。
ID[20:13]为目的地址域:数据接收方的CAN节点地址信息。
支持优先级机制,低地址CAN节点具有较高的通信优先级。
1.2.2 CAN帧控制信息
ID[12:5]为 CAN帧结构中的控制域,该域用来表示综控系统CAN网络上的帧类型,以及控制信息,ID[12:11]表示帧类型,对于帧类型的约定如下:
ID[12:11]=[00]该帧为信息帧,ID[12:11]无定义。当前帧为信息帧时,正文段为通信双方需交互的正文内容;
ID[12:11]=[10]该帧为控制帧,ID[12:11]为通信双方进行通信的控制命令。当前帧为控制帧时,正文段的数据为控制帧的相关控制参数。
1.2.3 当前CAN帧状态
当发送数据超过CAN单帧大小,需要对数据进行分包,采用ID1、ID0来标识当前CAN帧在整个业务数据中的分包情况如表2所示。
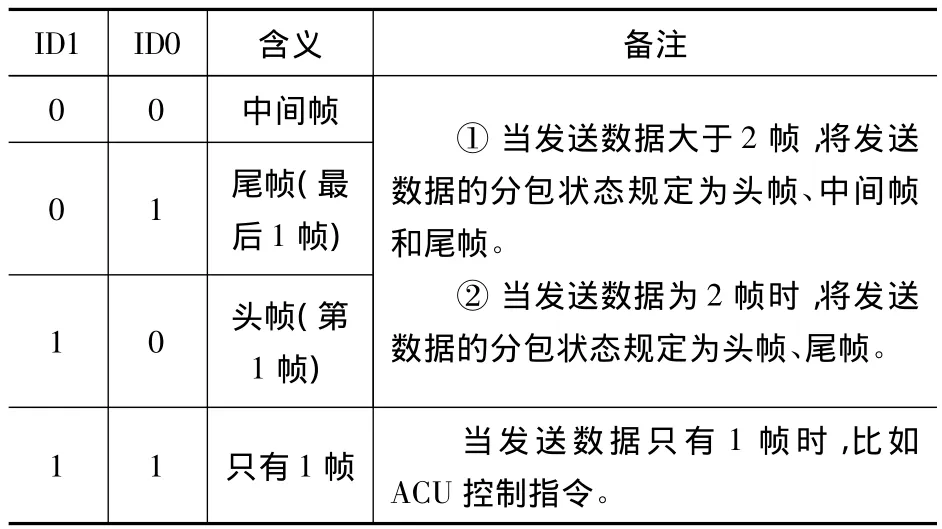
表2 当前CAN帧状态规定
发送数据通过分包形成的各帧需要准确填写ID[12:11]分包信息,以此来为收端数据组包提供必要信息。
1.3 系统通信流程与应用结果
伺服系统与综控系统通信流程如图1所示。
车载天线伺服系统能够通过CAN2.0B协议实时可靠的接收到综控系统发送的位置信息和姿态信息。

图1 伺服系统与综控系统通信流程
2 安装偏差角标定技术
由于伺服系统需要综控系统向其提供北向、当地水平面的姿态角,为保证角度的传递精度,首先需要将装车状态下天线坐标系与综控系统本体系之间的安装偏差角标定出来。下面给出了一种基于光学系统的角度标定技术。
2.1 相关坐标系
2.1.1 车体坐标系
车体坐标系简称体轴系,其定义如下:原点在车体质心:O1Y1沿车体纵轴,指向车体前进方向;O1X1垂直于O1Y1轴,指向车体右侧;O1X1Y1Z1为右手直角坐标系。该坐标在实际应用中由综控系统坐标系来代替。
2.1.2 综控系统坐标系
综控系统坐标系描述为b系,该坐标系与综控系统本体固连,由本体安装基准面确定,在没有陀螺和加速度表在本体安装误差的情况下,其3个轴与陀螺和加速度表的敏感轴平行。
按照装车位置,综控系统给出的是车体系相对北向、水平面的姿态角。
2.1.3 天线坐标系
天线坐标系描述为T系,如图2所示。在天线的安装基面上刻有安装基准线,沿车体纵轴方向指向车头。坐标原点OT在天线的回转中心,OTYT轴与重合,OTXT轴指向车体右侧,OTZT与 OTXT、OTYT轴构成右手直角坐标系。OTZT轴为方位轴,OTXT轴为俯仰轴。

图2 天线坐标系
2.1.4 坐标系相互关系推导
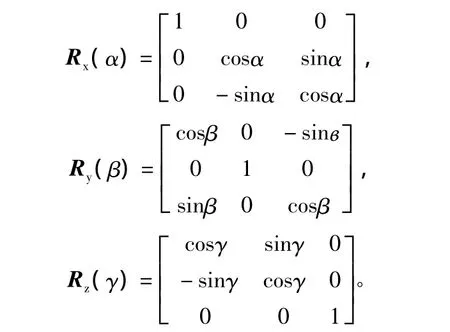
天线坐标系到综控系统坐标系的转换关系如下:①绕x轴逆时针旋转α角,原坐标到新坐标转移阵为Rx(α);② 绕y轴逆时针旋转β角,原坐标到新坐标转移阵为Ry(β);③ 绕z轴逆时针旋转γ角,原坐标到新坐标转移阵为Rz(γ)。
2.1.5 安装偏差角转换公式推导
当设备安装在车辆上,由于机械加工和测量误差,车体坐标系OTXTYTZT(实际由综控系统本体坐标系测定)与天线坐标系OTXTYTZT之间必定存在安装偏差角。如图3所示转序定义T系与b系间的方位偏差角 Δφm、滚动偏差角 Δψm和俯仰偏差角 Δγm。
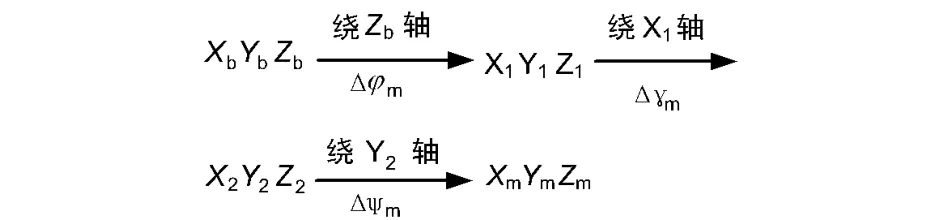
图3 坐标系转换图
因此,T与b系间的转换矩阵为:

2.2 偏差角标定技术
2.2.1 水平偏差角
由于车体具备粗平20',精调平1'的能力,因此首先将天线安装基面调平。在此基础上,综控系统进行水平倾角测量,测量的角度即可认为是水平安装偏差角 Δγm、Δψm。
2.2.2 方位偏差角
2.3 实测结果
在卫通天线装车以后,通过以上坐标标定方案标定偏差角之后,天线方位角和俯仰角与目标实际的角度,偏差控制在6'以内,满足系统跟踪目标要求,保证了链路通信。
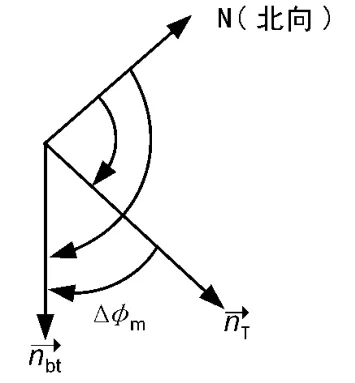
图4 方位安装偏差角
3 结束语
在某车载天线伺服系统的设计和实现过程中,通过对整个系统的CAN2.0B节点和协议设计,将天线坐标系与综控系统本体坐标系之间的常值偏差角进行标定,满足了整个系统的功能和性能要求,并在装车后实现了稳定跟踪卫星,保证了链路畅通。
[1]饶运涛,邹继军,王进宏,等编著.现场总线CAN原理与应用技术[M].北京:北京航空航天大学出版社,2007.
[2]KRAUS J D,MARHEFKA R J.天线(第 3版)[M].北京:电子工业出版社,2006.
[3]杨可忠.现代面天线新技术[M].北京:人民邮电出版社,1993.
[4]温桂森.动载体卫星通信天线控制数学模型[J].无线电通信技术,1997,23(4):36-40.
[5]武伟良,张振庄.基于捷联稳定的三轴车载动中通伺服系统[J].计算机与网络,2010,36(3-4):105-108.
[6]耿大孝.摇摆台的标校误差对稳定精度的影响[J].无线电通信技术,2005,31(2):42-44.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
家庭影院技术(2021年3期)2021-05-21
铁道通信信号(2020年5期)2020-09-21
制造技术与机床(2017年3期)2017-06-23
铁道通信信号(2016年10期)2016-06-01
北京航空航天大学学报(2016年4期)2016-02-27
专用汽车(2016年12期)2016-02-11
弹箭与制导学报(2015年1期)2015-03-11
铁路通信信号工程技术(2014年5期)2014-02-28
铁道机车车辆(2012年4期)2012-11-27