基于RSSI差分修正的加权质心定位算法*
2012-10-22 01:06吉小军
传感器与微系统 2012年5期
花 超,吉小军,蔡 萍,韩 韬
(上海交通大学电子信息与电气工程学院,上海 200240)
0 引言
节点定位技术在无线传感器网络(WSNs)中,除了用来报告事件发生的地点之外,还可用于目标跟踪、辅助路由以及网络管理等,因而成为一个很重要的研究方向和热点。目前的定位算法从原理上主要可分为两大类,基于测距的算法(range-based)和无需测距算法(range-free)[1]。基于测距的算法是通过物理测量获得节点间的距离或角度信息,使用三边测量、三角测量或最大似然估计等定位算法。常见的测距技术包括到达时间(time of arrival,ToA)[2]、到达时间差(time difference of arrival,TDoA)[3]、到达角度(angle of arrival,AoA)[4]、接收信号强度指示(RSSI)[5]等。一般来说这类算法具有较高的定位精度,但对节点硬件要求也较高。实际应用中基于RSSI的定位算法,由于成本低、操作简单而受到了广泛的关注。
针对建筑群环境相比旷广室外存在更多的遮蔽、绕射等干扰,使得参与定位的RSSI信号衰减复杂,本文在分析了无线电传播路径损耗模型的基础上,提出了利用差分修正方法对RSSI距离值进行处理,优选信标节点根据三边测量和加权质心算法计算节点位置的算法。该算法无需额外增加硬件。仿真表明:本文提出的算法能适应建筑群类的工作,具有较高的定位精度且没有显著增加运算量。
1 算法模型
1.1 无线电传播路径损耗模型分析与差分修正
在WSNs中,由于传感器节点自身具备通信能力,芯片通常会提供测量RSSI方法,在信标节点广播自身位置的同时完成RSSI测量。其误差主要来源于信号实际传播过程中环境影响造成的信号衰减与理论或经验模型不符造成实际建模的复杂性。
目前常用的信号传播模型包括自由空间传播模型、对数距离路径损耗模型、哈它模型、对数—常态分布模型等,其中,使用最为广泛的对数—常态分布模型为

式中d为距信源的距离,km;k为路径衰减因子,经验范围区间一般取[2,5];Xz为均值为0的高斯分布随机变数,其标准差范围一般取[4,10];PL(d0)为自由空间传播模型损耗基础值,按式Loss=32.4+10klgd+10klgf取d=1m计算,其中,f为频率MHz。
这样根据上式可得到各未知节点接收信标节点信号时的信号强度为

其中,P为发射功率,G为天线增益。按此式即可以计算出未知节点到信标节点的距离d。
实际环境中由于多路径反射、障碍物阻隔等因素信号传输往往是各向异性的,很难有一个模型能与实际情况完全吻合,从而严重影响定位精度。本文针对建筑群环境中RSSI值受到的障碍物阻隔影响严重的实际情况,提出对RSSI模型进一步作差分修正[6]的方法。
如图 1 所示,信标节点为B0(x0,y0),B1(x1,y1),B2(x2,y2),…,Bn(xn,yn),目标节点O。B0是与目标节点O最近的信标节点,令其为差分参考节点,参考节点B0到信标节点B1,B2,…,Bn的实际距离分别为d01,d02,…,d0n;目标节点O到信标节点B1,B2,…,Bn的差分测量距离分别为d1,d2,…,dn。
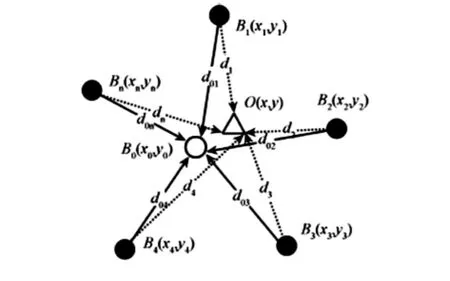
图1 差分修正定位算法示意图Fig 1 Diagram of difference modified localization algorithm
由于不同信标节点所处的环境具有差异性,导致其对参考节点的测量距离和实际距离的误差也是不一样的,为了反映该差异性,对不同的信标节点引入个体差异修正系数,定义为
式中d0i为参考节点到第i个信标节点的测量距离,d0i为参考节点到第i个信标节点的实际距离,n为参与定位的信标节点个数。
同时引入距离差分系数,定义目标节点到第i个信标节点的距离差分系数为

其中,λ为比例调整因子,di为目标节点到第i个信标节点的测量距离,n为参与定位的信标节点个数。
由此得到目标节点到第i个信标节点的修正距离

其中,参考节点测量距离误差e0i=d0i-d0i,n为参与定位的信标节点个数。
1.2 基于三边测量的加权质心定位算法
利用差分修正RSSI模型得到精度更高的RSSI距离值后,提出了采用基于三边测量法的加权质心定位算法实现高精度定位[7,8]。
假设已知A,B,C三个节点的坐标分别为(xA,yA)(xB,yB)(xC,yC)和它们到目标节点M的距离分别为dA,dB,dC,目标节点M的坐标为(x,y),则有
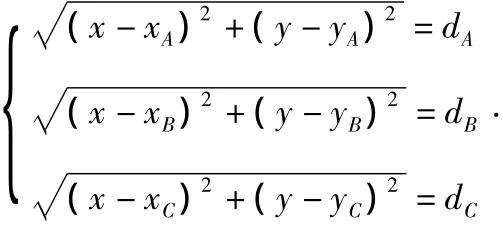
求解该方程就可以得到目标节点的坐标(x,y),这就是三角测量定位的基本原理。
实际定位过程中,如果有n个信标节点参与定位,则可得到C3n组目标节点坐标值。受随机干扰和环境差异的影响,用不同的信标节点组合所得到的目标节点位置坐标值会有一定差异,为了充分利用多个信标节点的定位信息,提高定位精度,可利用加权质心定位得到的目标节点坐标的最佳估计值。文献[9]中提出的加权质心定位算法,用信标节点对未知节点的不同影响力来确定加权因子以提高定位精度。并且在理论分析的基础上,提出了优选信标节点进行节点定位计算的规则,以此进一步提高节点定位精度.加权质心定位算法计算简单,定位过程中节点间无通信开销,节点定位精度较常用的极大似然估计算法高,具有较普遍的应用意义。
加权质心定位算法的基本思想是通过加权因子来体现信标节点对质心坐标贡献的大小,一般来说,距离越近的信标节点对定位精度的影响就越大,因此,可通过距离因子来体现,定义加权因子为

2 算法实现流程
在建筑群区域内,放置若干信标节点,各个信标节点位置分布均匀,固定。自组网形成WSNs。组网成功后进行以下工作:
1)信标节点以相同功率周期性发送自身信息:节点ID,自身位置信息;
2)目标节点在收到信息后,记录不同信标节点的超过设定阈值的RSSI值。考虑到瞬时干扰问题,采用高斯分布对接收到的RSSI值进行初步处理,提高RSSI值的可靠性。
3)目标节点在收到M个有效信标信息后,对信标节点依其RSSI值从大到小排序,建立3个集合:
信标节点集合:Beacon-set={a0,a1,a2,…,am};
信标节点位置集合:{x0,y0),(x1,y1),(x2,y2),…,(xm,ym)};
差分参考节点(x0,y0)到其他信标节点的实际距离集合:Dist-set-real={d01,d02,…,d0m}。
差分参考节点(x0,y0)到其他信标节点的测量距离集合:Dist-set-test={d01,d02,…,d0m}。
4)在Beacon-set集合中优先选择RSSI值大的信标节点组合成下面的三角形集合

利用差分修正有关公式求出目标节点到信标节点的差分修正距离集合

5)利用三边测量法公式,分别求出位置节点的坐标估计M1(x1,y1),M2(x2,y2),M3(x3,y3),…
所得结果代入加权质心算法公式,求得待测节点坐标M(x1,y1)。
3 算法仿真与分析
利用Matlab仿真,基本初始条件为WSNs位于100 m×100 m区域内,该区域左下角坐标为(-50,50 m),右上角坐标为(50,50 m)。未知节点位于(0,0 m)点,为适应室内定位,信标节点等距放置,根据一般室内环境得到路径损耗k=2.45,参考距离1 m处的接收功率P= -37.8 dB。
仿真不同信标节点数目为 9,12,16,25,36 时,进行100次实验,每次实验采用符合高斯分布的RSSI值中最大的3个或者4个信标节点参与定位计算,得到定位误差数据。图2为4个信标节点参与目标节点定位的定位算法误差统计,图3为5个信标节点参与目标节点定位的误差统计。表1为不同信标节点总数,参与定位节点不同的定位误差统计情况表。
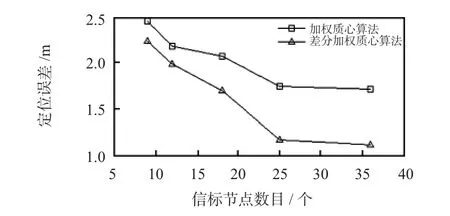
图2 4个信标节点参与定位误差统计Fig 2 4 beacon nodes involve in positioning error statistics
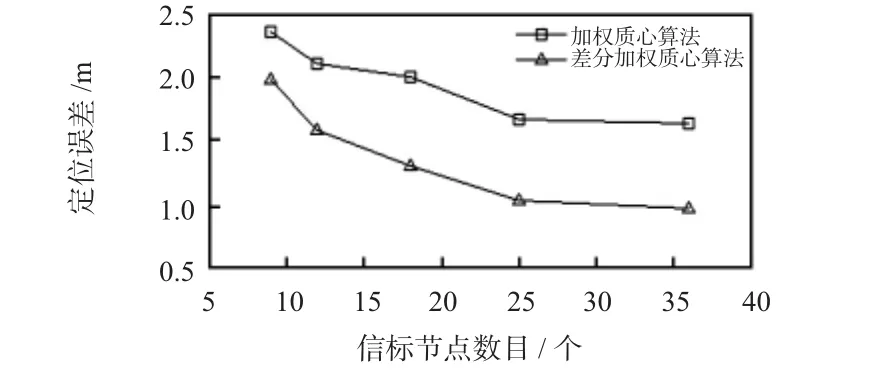
图3 5个信标节点参与定位误差统计Fig 3 5 beacon nodes involve in positioning error statistics

表1 定位误差统计表Tab 1 Location error statistics
由以上数据对比可知,本文利用差分修正RSSI值的加权定位质心算法定位误差较小,复杂定位环境下,定位精度优于普通未修正的加权质心定位算法。
4 结论
本文从室内定位的方向研究,针对室内定位精度不高问题,提出了基于RSSI差分修正的加权质心定位算法,该算法无需增加额外的硬件,能较好地使用室内WSNs低成本与低功耗的要求。仿真结果也表明:该算法定位精度高,算法复杂度不大,能很好地使用室内定位。
[1] He T,Huang C D,Blum B M,et al.Range-free localization schemes in large scale sensor networks[C]∥Proc of the 9th Annual Int’1 Conf on Mobile Computing and Networking,San Diego,2003:81 -95.
[2] Harter A,Hopper A,Steggles P,et a1.The anatomy of a contextaware application[C]∥Proceedings of the 5th Annual ACM/IEEE International Conference on Mobile Computing and Networking,New York,USA:ACM,1999:59 -68.
[3] Girod L,Estrin D.Robust range estimation using acoustic and muhimodal sensing[C]∥Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems,Piscalaway,USA:IEEE,2001:1312 -1320.
[4] Niculescu D,Nath B.Ad Hoc positioning system(APS)using AoA[C]∥Proceedings of the IEEE INFO-COM,NewYork,USA:IEEE,2003:1734 -1743.
[5] Bahl P,Padmanabhan V N.RADAR,an inbuilding on RF-based user location and tracking system[C]∥IEEE Computer and Communications Societies Conference,2000:775 -784.
[6] 任维政,徐连明,邓中亮.基于RSSI的测距差分修正定位算法[J].传感技术学报,2008,21(7):247 -1250.
[7] 林 玮,陈传峰.基于RSSI的无线传感器网络三角形质心定位算法[J].现代电子技术,2009,32(2):180 -182.
[8] 陈维克,李文锋,首 珩,等.基于RSSI的无线传感器网络加权质心定位算法[J].武汉理工大学学报,2006,30(2):265-268.
[9] 孙利民,李建中,陈 渝,等.无线传感器网络[M].北京:清华大学出版社,2005:138.
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
北京航空航天大学学报(2021年4期)2021-11-24
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
测控技术(2018年4期)2018-11-25
铁道通信信号(2018年3期)2018-04-19
雷达学报(2017年1期)2017-05-17
长春理工大学学报(自然科学版)(2015年4期)2015-12-07
全球定位系统(2015年4期)2015-02-28
航天返回与遥感(2014年5期)2014-07-31