自治式海洋环境监测系统的低功耗设计
2012-10-23 03:01刘素花李思忍徐永平
海洋科学 2012年7期
刘素花, 李思忍, 徐永平
(1. 青岛理工大学, 山东 青岛 266520; 2. 中国科学院 海洋研究所, 山东 青岛 266071)
自治式海洋环境监测系统的低功耗设计
刘素花1, 李思忍2, 徐永平2
(1. 青岛理工大学, 山东 青岛 266520; 2. 中国科学院 海洋研究所, 山东 青岛 266071)
针对海洋环境监测系统中供电电池组有限储能与仪器长期工作之间的矛盾, 进行了自治式海洋环境监测系统的低功耗研究。从节能降耗、充分利用水体能源出发, 将定点锚泊潜标和浮标技术相结合, 采用双浮体技术, 基于能量守恒, 研制了一种储能型的传动装置; 在分析了影响系统功耗的各种因素的基础上, 对单片机数据采集控制存储系统进行了低功耗设计, 为海洋环境监测系统长期在位作业提供了有力的能源保证, 很好地解决了海洋环境监测系统的能源供应问题, 使得该系统可以依靠单一的传感器组完成深达55 m以上的水体次表层海洋要素的长期连续垂直剖面观测。
低功耗; 节能; C8051F340单片机; 海洋环境
海洋因其地理空间的广袤性和自然环境的复杂性, 使得对海洋大范围、长时间地连续监测非常困难,目前采用的主要手段是各种潜标、浮标系统和其他一些自容式监测仪器[1]。由于工作环境的特殊性, 从外部给这些监测系统提供驱动电源的成本很高, 或者是从技术层面和实际操作上根本不可能实现系统的外部供电。所以, 海洋监测仪器基本上都是采用自备电源, 也就是采用蓄电池对系统进行供电。这些电池供电系统都希望能在无人干预的情况下工作时间越长越好, 而这和电池组的有限储能产生了矛盾,因此低能耗系统设计就具有重要的意义, 可以延长系统的工作周期, 降低运营成本。对电路系统而言,低功耗设计可以降低系统热耗散, 提高系统的稳定性和可靠性。
自治式海洋环境监测系统在保证系统功能的前提下, 还应满足低功耗、连续工作时间长、体积小、质量轻、高可靠性的要求。测量、控制、通信、内耗等都需要能源, 因此, 在能源供给体积及容量有限的制约条件下, 充分利用水体能源及系统自身的能量, 最大限度地减少能耗, 最大限度地延长作业时间, 是研制自治式海洋环境监测系统努力实现的目标。为此, 研制高效节能的驱传动系统、选择微功耗的元器件、设计低功耗的单片机测量控制电路、减少高频工作时间、降低机械系统和电源的内耗、选择最佳的控制模式等, 是实现自治式海洋环境监测系统低能耗所采取的主要措施。本文分别从机械设计和电气设计两个方面对自治式海洋环境监测系统的低功耗进行了研究, 为解决长期在位作业的海洋环境监测系统的能源供应问题提供了一种新方案。
1 自治式海洋环境监测系统的双浮体设计
自治式海洋环境监测系统主要由剖面测量平台(以下简称小浮体)、潜标式主浮体和锚泊系统三部分组成。主浮体平台位于水面以下55 m的地方, 是自治式海洋环境监测系统的主要组成部分, 不仅是两个运动平台之一, 而且还是小浮体和锚泊系统的连接枢纽, 其上部连接着小浮体, 下部连接锚泊装置锚固在海底。同时主浮体平台也是系统能量转换传动装置和控制装置的搭载主体, 包括外壳、传动储能机构、数据采集控制机构、浮力系统等组成部分。小浮体是所有测量传感器的载体, 由架体、浮球、测量设备等组成。它可以根据需要搭载各类传感器, 进行海洋次表层水质等多参数的立体连续测量[2], 能够在海表面和主浮体潜伏的位置之间进行循环升降运动。本系统设计测量范围为海面下5~55 m。锚泊系留系统由重力锚块、锚链、释放器、辅助浮球、转动链接环和特制包塑锚泊缆等组成。系统总体结构如图1所示。
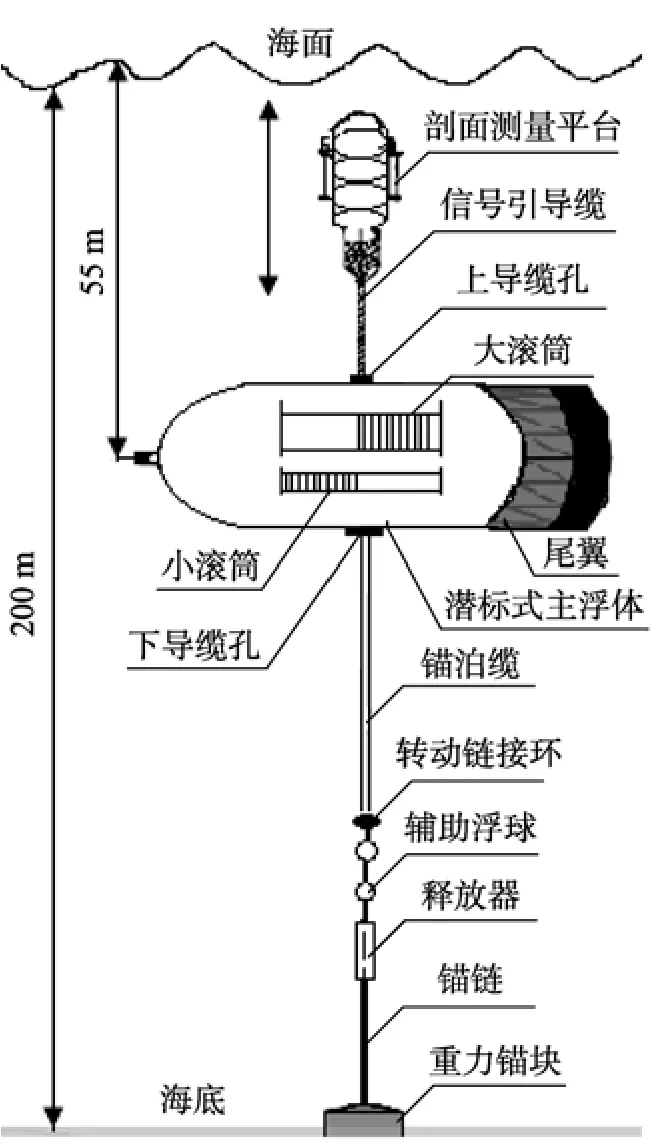
图1 自治式海洋环境监测系统结构图Fig. 1 Configuration of the autonomous ocean environment monitoring system
自治式海洋环境监测系统采用双浮体设计, 通过驱传动机构之间的配合使得两个浮体在海水中上下运动, 由主浮体建立一个水体中层平台, 剖面测量从这个平台向上开始, 通过小浮体搭载传感器升降, 这本身就降低了功耗。设计的自治式海洋环境监测系统最大布放深度 200 m, 海洋要素最大剖面测量距离55 m, 小浮体最小有效载荷20 kg。系统可连续工作 1 a以上, 能够进行定时采集和存储水文数据。
系统长期连续工作, 即使小浮体每天上浮、下潜各一次, 它所需要的能量也非常巨大。为此, 整体系统的低功耗设计非常重要。系统在机械设计方面采用了节能型的铰接拉紧传动装置及双浮体技术, 充分利用水体及系统本身的能量, 为系统长期运行提供了能源保证。在电气控制中, 采用全速 USB FLASH微控制器 C8051F340, 设计了高度集成的低功耗、高可靠的数据采集控制存储器, 并进行了单片机系统的低功耗设计。
2 自治式海洋环境监测系统的储能传动系统设计
2.1 储能传动装置
两浮体在水中具有正浮力, 我们设定浮体上升时浮力对该浮体所作的功为正, 浮体下降时, 浮力所作的功为负。浮体从某点A在浮力作用下上升到另外某一点B后, 又克服浮力下潜到起始点A。两次行程浮力所做的功大小相等, 方向相反。我们可以认为, 浮力对于浮体从A点到B点又回到A点的过程中所作的功为零, 在此过程中, 浮体消耗的功也为零。为了将小浮体上升时浮力所做的功储存起来, 在小浮体下降时释放存储的功, 我们设计了一个双滚筒装置, 两滚筒直径不等, 之间通过链传动齿轮连接。主浮体和小浮体之间的缆绳缠绕在大滚筒上, 主浮体和锚泊系统之间的缆绳缠绕在小滚筒上。大滚筒旋转放出的缆绳带动小浮体上升的同时小滚筒旋转收进缆绳带动主浮体下潜。大小滚筒的直径比(周长比)和小浮体与潜标主浮体浮力比成反比。假设D1,D2,F1,F2分别表示大、小滚筒的直径及主浮体、小浮体在水中所受的浮力, 则有D1/D2=F1/F2, 即D1F1=D2F2, 推断出小浮体测量平台上升所作的功和主浮体下降所作的功大小相等,方向相反。同理,小浮体下降所作的功和主浮体上升所做的功相等。整个系统的工作原理利用了系统的能量守恒定律, 如图 2所示。两个同等质量的物体悬挂于一根经过滑轮转向的绳索两端, 当滑轮转动时, 一个物体上升,另一个物体下降, 在理想状态下, 如果忽略滑轮的摩擦力, 重力对于上升物体和下降物体所做的功大小相等, 方向相反。即没有外力作用下, 一个物体上升的同时另外一个物体下沉。我们可以认为重力对下降物体所作的功通过绳索传递给上升物体成为克服重力上升所做的功。
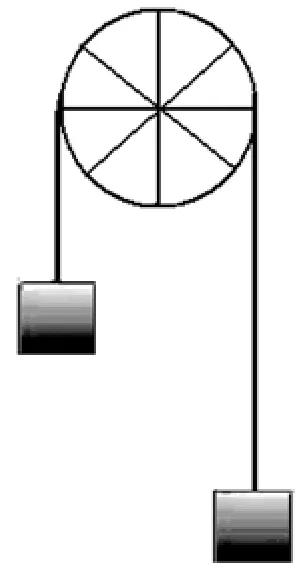
图2 储能传动系统原理Fig. 2 Operating principle of the energy-conserving transmission system
基于此原理, 我们设计了自治式海洋环境监测系统的节能传动系统。该系统由双浮体组成, 浮体之间通过传动储能装置连接。该传动储能装置可以让一个浮体上升的过程中另外一个浮体下降。浮力对小浮体测量平台上升所做的功通过传动储能装置提供给主浮体作为下降克服浮力所做的功[3-4]。反之,浮力对主浮体上升所做的功通过传动储能装置转换为小浮体下降所做的功。系统内设电机驱动系统, 可以提供微小扰动, 破坏系统平衡, 使浮体按照设定程序上下运动, 采集测量数据。因此该系统不消耗系统本身的能源就可以完成测量平台的上升和下降过程。以上结论建立在系统没有受到水流影响, 系统传动摩擦损耗为零的理想状况下。
当小浮体全部下潜到水下时, 它是一正浮力浮体, 上升时可以依靠自身正浮力驱动, 理论上不需要外加电源。因此, 为降低能耗, 海洋要素的采集与存储是在小浮体上升过程中完成的。但系统在实际运行过程中, 由于水体重力、惯性力、粘性力及系统存在的机械摩擦力, 不可避免地会损失一些能量,所以在小浮体下潜过程中需外加电源补充少量能量。
2.2 驱动装置
电机驱动系统由外壳、电机、电源、电路 PCB板、内齿轮、外齿轮、外支架、内支杆、端盖等组成。电机驱动系统是一种自含式机构, 位于主浮体平台的大滚筒内, 利用大滚筒作为电机的水密外壳。此外壳又作为储能转换装置中小浮体信号引导缆的绕线滚筒, 这样既节省了空间, 又简化了能量传递, 增加了系统运行的稳定可靠性。小浮体由信号引导缆牵引, 受电机驱动系统的驱动和控制。密封舱内部中心轴处通过两个端盖架着一根长轴, 电机和电源集成所构成的悬锤就悬挂在长轴的下端, 同时驱动电机通过齿轮和滚筒作用。当驱动电机轴转动时,轴上的齿轮就会带动舱体端盖上的内齿轮转动, 由于电池重力较大, 垂直指向地心, 电机轴的位置几乎不动, 从而带动端盖转动, 而端盖与整个密封舱外壳是固定在一起的, 这样, 电机的转动就带动整个滚筒转动, 大小滚筒间通过齿轮链接, 从而带动整个储能转换装置进行运转。电机驱动装置采用静密封技术, 解决了动密封技术产生的摩擦会损耗大部分能量的消耗和动密封易渗漏的问题, 降低了能量损耗。驱动机构拆掉密封筒后其结构示意图如图 3所示。
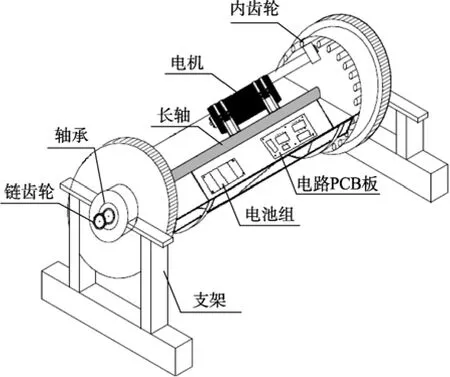
图3 驱动机构结构图Fig. 3 Drive installation with winch drum case removed
驱动机构和小滚筒之间的能量传递选用具有高效水下传动性能的链传动。由于链传动有缝隙可以让水流畅通过, 从而减少了水体阻力及摩擦力。
3 单片机数据采集控制存储系统的低功耗设计
功耗是一个系统的问题, 以单片机为核心构成的系统其总能耗是由单片机能耗及其外围电路能耗共同构成的。单片机系统的低功耗设计需要从硬件设计和软件设计两方面综合考虑。
C8051F340单片机为完全集成的混合信号片上系统型MCU[5], 工作电压2.7~3.6 V, 典型值为3.3 V,它拥有灵活的时钟硬件, 具有 IDLE、STOP、SUSPEND低功耗模式, 可以方便地在高效运作模式和低功耗模式间进行转换, 且有多种时钟方案可供选择。C8051F340单片机内置高速振荡器和低速振荡器, 还可外接振荡器, 每种振荡器模式下有多种频率可选, 不同的时钟模式可以实时切换, 便于进行低功耗控制。C8051F340单片机还可以在 5个系统时钟周期内即可实现中断响应, 大大节省了等待功耗。C8051F340单片机的I/O端口资源丰富, 设置灵活, 可以根据实际需要利用软件通过相关寄存器的设置来配置I/O端口的I/O方式, 及时关闭片上没有用到的外设。
单片机内部的总电流消耗分为工作电流和漏电流, 这些电流在转换为系统所需要的其他能量形式的同时, 有相当一部分转换成热能。低电压供电可以大大降低系统的工作电流, 并且工作电流和时钟频率近似为正比的关系, 降低时钟频率, 就可以有效降低单片机的功耗, 因此, 要降低单片机系统的功耗, 就要降低系统的工作电压及运行频率。基于以上分析, 在保证系统安全可靠的前提下, 在硬件选择和设计中, 选用C8051F340单片机做主控芯片, SSR固态继电器做主开关器件, 通过单片机的 SPI0串口外挂SD存储卡海量存储数据, 利用串口转换芯片及多路选择开关分时选通传感器。传感器选用成熟的集成式数字传感器, 自带电源。通过电源管理模块分别给CPU、SD存储卡、串口转换模块及开关控制装置等提供相应的工作电压[6]。由于工作电压通常是恒定的, 因此, 要减小工作电流来降低系统的总功耗,是通过减小平均工作电流来实现的。平均工作电流是系统在单位时间内消耗的电荷量。在此系统设计中, 其总的运行时间分为两部分: 高频高效工作期和低频低功耗休眠期。MCU在高效工作期的电流较大, 一般 15 mA, 而休眠期的电流很小, 一般只有74 μA。平均工作电流是系统在这两部分时间内的总电荷量除以对应时间所得的平均值。所以为了减小平均工作电流, 就必须缩短高效工作期的时间, 尽量延长休眠时间[7-8], 为此, 利用 C8051F340单片机灵活的时钟硬件, 使用双时钟方案, 设计了一个高速运作模式和低速休眠模式。CPU在处理事件(采集存储数据及实施开关控制等)时使用内部24 MHz高速晶振, 休眠时切换到外部10 kHz低速振荡器, 并关闭除了T2定时器以外的所有外设。也就是说, 系统采用工作-休眠-工作-休眠……的循环工作方式并使外设分时离散工作来达到减小平均工作电流,降低系统总功耗的目的。部分程序流程图如图4、图5、图6所示。
硬件低功耗设计离不开软件的配合, 尽量将硬件应用的低功耗特性反映在软件中。本软件设计中,使用“中断”方式来响应处理事件, 尽量减少 CPU的运算量, 使用短的数据类型和字符型的8位数据, 并避免浮点数运算, 让I/O模块间歇运行, 端口配置成漏极开路方式, 用PUSH-PULL方式驱动LED, 未用的I/O引脚设置成输出或输入, 并用外部上拉电阻拉高。不用的I/O模块或间歇使用的I/O端口及时关闭,充分利用开关控制信号, 只在必要时选通激活相应的外设[9-10]。
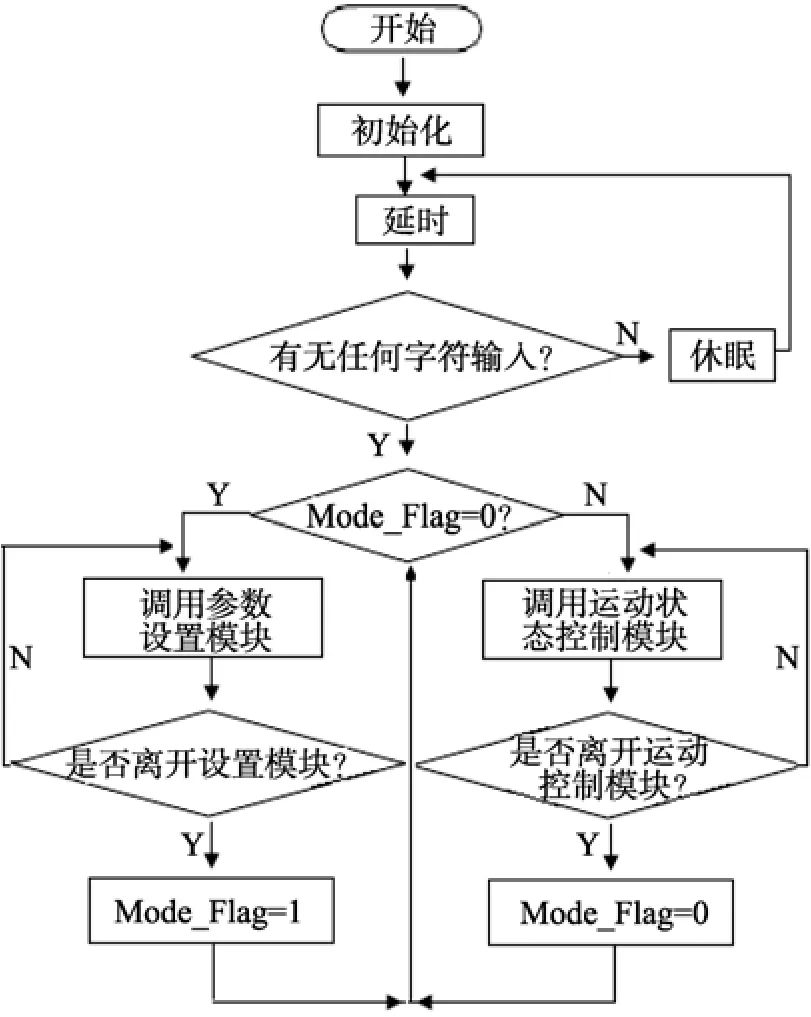
图4 主程序流程图Fig. 4 Flowchart of the main program
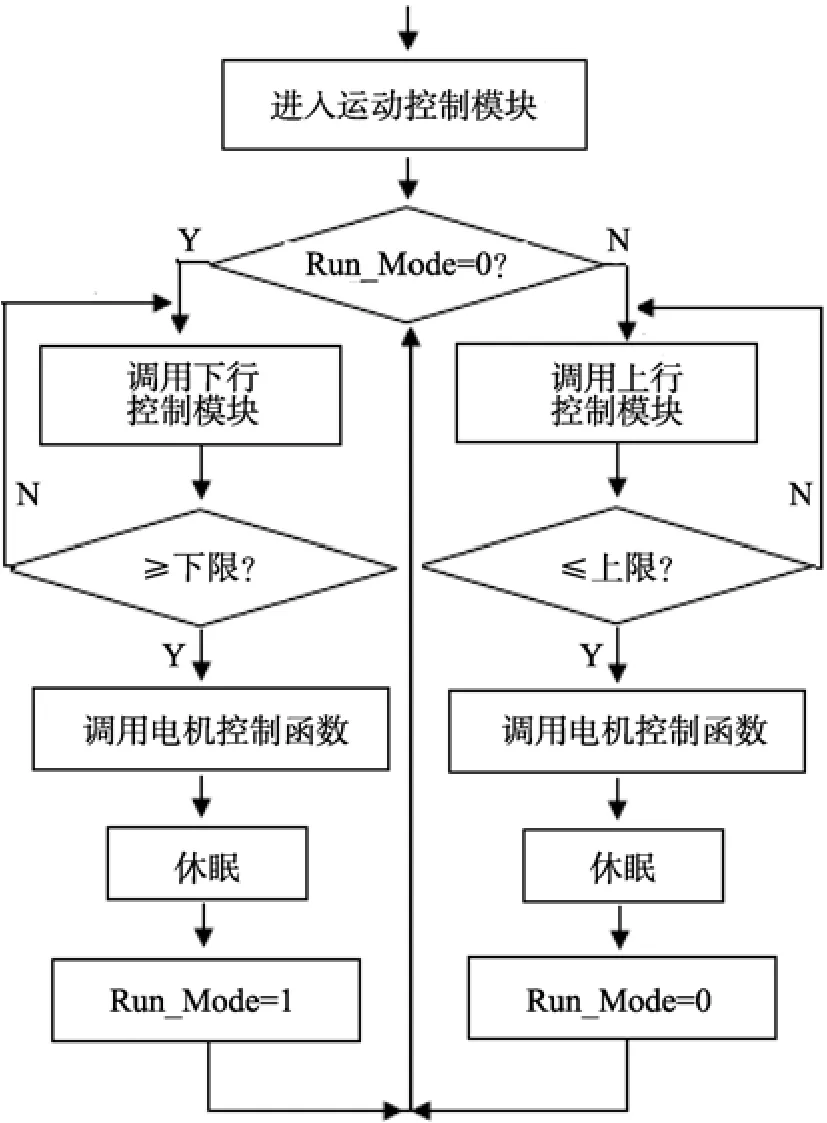
图5 运动状态控制模块流程图Fig. 5 Flowchart of the control module for the movement mode
在实验室对单片机系统进行测试, 静态电流消耗约为7 mA, 工作电流80 mA, 完全可以满足系统要求。
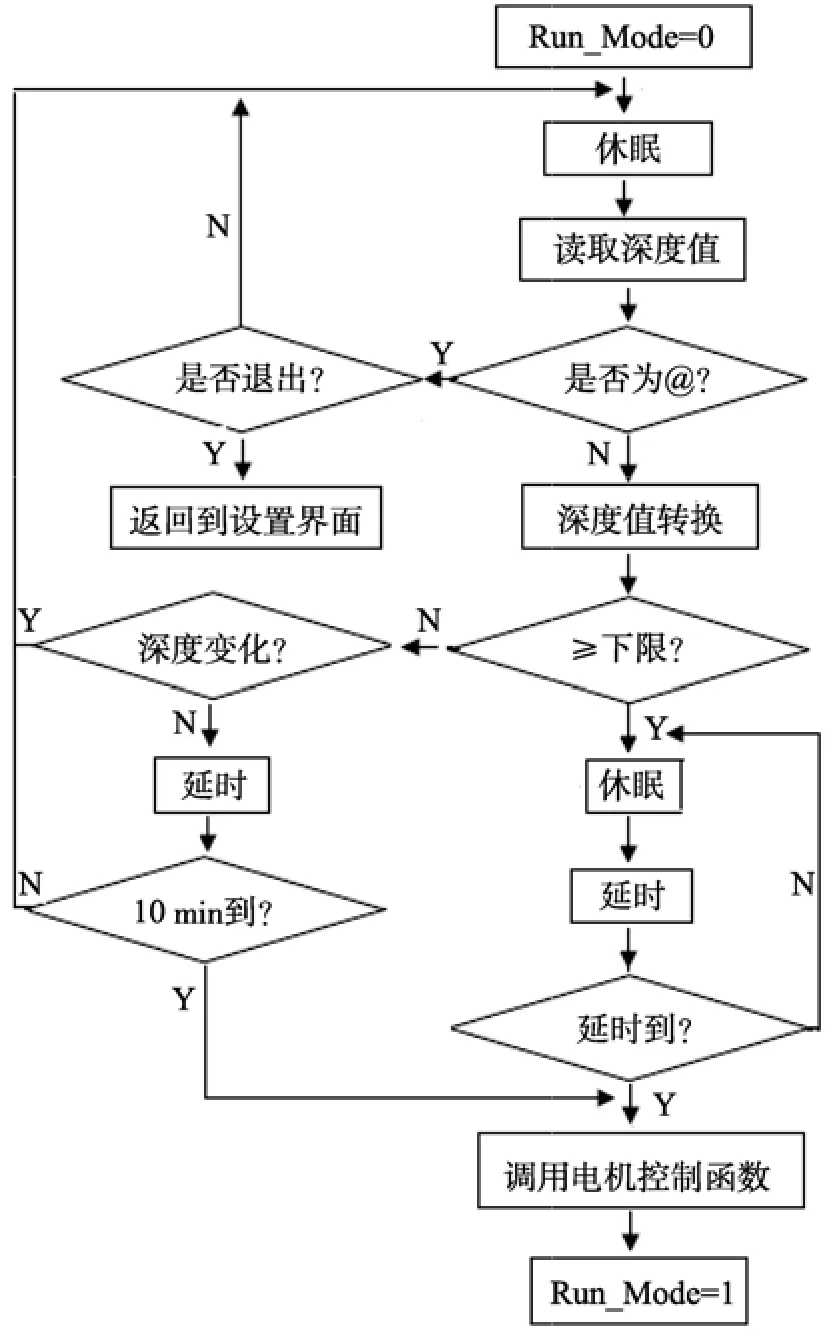
图6 下潜过程运动流程图Fig. 6 Flowchart of the submerging movement
4 结论
自治式海洋环境监测系统通过引入储能型的传动装置及对单片机嵌入式系统进行低功耗设计, 实现了无人值守情况下对海洋要素垂直剖面的长期连续观测, 满足了海洋学研究、海上工程建设前期调查和海洋军事上的需求, 提高了人类原位长期持续观测海洋环境变化的能力, 是对传统测量方法的有益补充。从以上介绍可以看出此监测系统具有以下特点: (1)具有安全连续性。系统采用双浮体耦合技术,利用小浮体搭载成熟的集成式传感器, 根据事先设定的程序进行 5~55 m任意深度安全连续地升降,可以全天候工作, 具有多参数测量以及单一传感器的垂直剖面连续测量等多用途的特点。(2)具有高效节能性。系统利用储能传动装置, 实现了水体压力能及位能的直接转化, 大大减少了后续维护和对动力电源的需求, 保证了系统运行的长期稳定性。此装置可以应用于不同海域、不同海况下。(3)具有低功耗、高可靠性。单片机数据采集控制存储系统的低功耗设计, 使得系统可以长期自动监测海洋环境, 具有自治功能。
[1] 罗续业, 周智海, 曹东, 等. 海洋环境立体监测系统的设计方法[J]. 海洋通报, 2006, 25(4): 69-77.
[2] Gong Dejun, Chen Yonghua, Li Siren, et al. A moored underwater energy conservation system for profiling measurement[J]. China Ocean Engineering, 2007, 21(3):541-548.
[3] 马峥, 张华, 张楠, 等. 水下滑翔机滑翔运动的能量分析及水动力性能研究[J]. 船舶力学, 2006, 10(3):53-60.
[4] 陈建秋. 双浮体—棘轮式波浪能发电装置[J]. 能源研究与利用, 2001, 3: 20-21.
[5] 鲍可进. C8051F单片机原理及应用[M]. 北京: 中国电力出版社, 2006.
[6] 刘素花, 龚德俊, 徐永平, 等. 基于单片机的海洋环境监测系统的控制电路设计[J]. 海洋科学, 2009,33(8): 67-71.
[7] 邵毅. 单片机系统低功耗设计在数据采集系统中的应用[J]. 海洋技术, 2005, 24(3): 36-40.
[8] 赵志宏, 李小珉, 陈冬. 基于 C8051F系列单片机的低功耗设计[J]. 单片机与嵌入式系统应用, 2006, 8:7-10.
[9] 陈洪明. 嵌入式系统的低功耗技术研究[J]. 实验科学与技术, 2008, 6(1): 19-21.
[10] 王辉, 马福昌. 检索式数字水位数据采集系统的低功耗途径探讨[J]. 太原理工大学学报, 2008, 39(2):119-122.
Design of low-power consuming, autonomous ocean environment monitoring system
LIU Su-hua1, LI Si-ren2, XU Yong-ping2
(1. Qingdao Technological University, Qingdao 266520, China; 2.Institute of Oceanology, the Chinese Academy of Sciences, Qingdao 266071, China)
Nov.,12,2010
low-power consumption; energy conserving; C8051F340 microcontroller; ocean environment
The work durability of a battery powered marine environment monitoring system is limited by the battery volume. Research on low-power consuming, autonomous ocean environment monitoring system had been carried out. To save energy and make full use of the water energy, this profiler adopted the technique of two-float assemblies by incorporating a small, instrumented profiling buoy with a fixed-point mooring main submersible buoy. An energy-conserving transmission had been developed under the energy conservation principle. Based on the analysis of the factors affecting power consumption, low-power design of the microcontroller data acquisition and control system had been completed. These designs could satisfy the abundant energy need for the long-term inplace operation of the ocean environment monitoring system. The prominent advantage of the system is not limited by the battery capacity and can provide 55 meters ocean elements continuous profiles relying on a single sensor group.
P715.4
A
1000-3096(2012)07-0001-06
2010-11-12;
2012-03-21
国家海洋局公益性项目 (201005027-6); 中国科学院知识创新工程重要方向项目(KZCX2-YW-JS203)
刘素花(1970-), 女, 山东青州人, 博士, 主要从事检测、自动控制等方面的教学与研究, 电话: 0532-82898737, E-mail: liusuhua2003@126.com
(本文编辑:刘珊珊)
猜你喜欢
中学生数理化·八年级物理人教版(2022年5期)2022-06-05
中学生数理化·八年级物理人教版(2022年5期)2022-06-05
中学生数理化·八年级物理人教版(2022年5期)2022-06-05
长江科学院院报(2022年3期)2022-03-18
成都信息工程大学学报(2021年1期)2021-07-22
舰船科学技术(2021年12期)2021-03-29
哈尔滨工程大学学报(2021年2期)2021-03-16
上海船舶运输科学研究所学报(2019年1期)2019-04-19
电子制作(2019年24期)2019-02-23
电子制作(2017年13期)2017-12-15