
基于瞬时无功理论的分散式UPS并联技术
2012-11-22 01:19李桂梅苏岱安
湖南师范大学自然科学学报 2012年6期
李桂梅,苏岱安
(湖南商学院计算机与信息工程学院,中国 长沙 410205)
为了实现大容量UPS的高可靠性,对大容量UPS提出了并联冗余的需求[1-2].即N+X台UPS的输出线直接并联,最大负载不超过N台UPS的容量,当一台UPS出现故障后,该UPS可以自动退出系统,其余UPS可以承担所有全部负载,保证了UPS系统的可靠运行,大容量UPS的并联控制系统当前的主流是分散式并联[3-6].本文根据当前UPS并联系统的发展状况,结合瞬时功率理论,提出了一种新的分散式并联控制方法,具有很好的稳态和动态性能.
1 瞬时功率理论
三相电路的瞬时无功功率理论首先于1983年由赤木泰文提出,是以瞬时实功率和瞬时虚功率的定义为基础的,在本系统中,采用瞬时功率理论作为本算法设计的理论基础.设三相电路各相电压和电流的瞬时值分别为ea,eb,ec和ia,ib,ic,为方便分析,将其变换至αβ坐标系下,变换式如下:
(1)

(2)

(3)
综合上面的等式可以得出
(4)
将检测到的环流ita,itb,itc代入(4)式,就可以计算出环流引起的有功功率pt和无功功率qt,分别去控制UPS电压给定的相位和幅值,就可以达到瞬时均流的效果.
1.1 单机逆变器的控制方法
单机逆变器控制方法是基于两相旋转坐标系的,坐标系的定向是输出电压的空间矢量,为了使算法简单,并且具有较好的抗干扰特性,实际系统的定向是以内部三相SVPWM基波为基准矢量,根据分析,无论在稳态还是动态情况下,内部的基准矢量与输出电压矢量的相位差都可以忽略.
三相逆变器控制系统的设计目标是逆变器输出电压具有1%的稳态精度和5%的动态精度,动态恢复时间为60 ms,100%非线性负载时的THD<4%[7].为了实现这些性能指标,一些文献提出了很多新的控制方法,例如无差拍控制、重复控制[8],也有采用状态观测器进行反馈控制的方法[9-10],这些方法在某些确定的条件下的确可以取得很好的效果,但是都存在一个最大的问题,即存在稳定性问题及负载的适应能力较差,难以适应UPS复杂的负载状况.实际上传统的电压电流双环PID控制就可以实现上述的指标,前提是参数必须配合得当,并且采用一些特殊的手段,如负载电流前馈等,以提高系统的响应速度.PID控制的最大优点在于它的稳定性好,并具有很好的负载适应能力,非常有利于实际的产品化[11].本系统设计了基于传统PID控制的矢量控制方法,取得了较好的效果,图1是本系统的逆变器控制算法的原理框图.
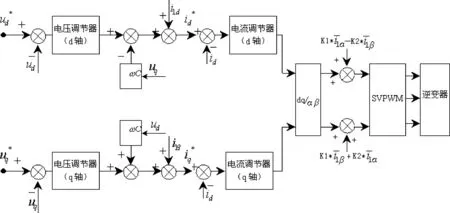
图1 逆变器控制算法的原理框图
控制算法是在d,q坐标系下进行的,d,q坐标系的定向是以输出电压给定作为参考值的,将采集到的模拟信号经过A/D转换,再经过Park变换变换至dq坐标系,稳态时各变量在dq坐标系下为直流量,采用PI调节器可以实现稳态无差控制.控制部分为传统的双环控制,内环为电流环(P或PI调节),外环是电压环(PI调节),电压外环的给定与电压反馈之差经过PI调节器作为电流内环的给定,电流内环的给定和逆变桥输出电流之差经过P调节器作为逆变桥输出电压的给定.三相逆变桥的开关模式采用空间矢量PWM(SVPWM)的开关方法,可以实现输出无谐波情况下的最高直流母线电压利用率,即输出线电压的峰值与直流母线电压相等.
如图1所示,dq轴电压给定和电压反馈之差经过PI调节器,再减去dq轴之间电流的解耦项作为电流内环的电流给定,电流给定与电流反馈之差减去dq轴之间的电压解耦项作为SVPWM发生器的电压给定.电压外环内的解耦项实际上是电容电流预测,电流环内部的解耦项实际上是滤波电感上的压降.在电压环内部引入负载电流前馈的作用是抵消非线性负载的影响,降低输出电压的THD,将前馈项与反馈项相加,实际上就是电容电流,所以可以看出电流环实际控制的是电容电流.并且在电流调节器的输出经旋转—静止变换后,加上以负载平均电流为基础的不平衡负载补偿算法,以改善逆变器对负载适应性.
控制系统中采用全数字控制,核心控制器为TI公司的DSP—TMS320F240,具有较强大的运算功能和丰富的模拟和数字接口,基本满足了系统的要求.
1.2 基于瞬时无功理论的并联方法
1.2.1 UPS的同步方法 并联的前提是各UPS的输出电压的频率和相位必须保持一致,相位同步需要一个锁相环(PLL)来实现,各种UPS产品中采用了多种锁相技术[12],一般采用模拟控制的UPS采用模拟PLL电路,数字控制的UPS一般采用数字PLL,数字PLL一般以输入(旁路)电压每个周波的过零点作为基准,这种方法的缺点在于如果基准电压发生畸变,可能导致PLL的误差较大.本系统采用空间电压矢量的数字锁相算法,并且在实际系统中得到应用,实验结果证明这是一种高精度的锁相方法.
根据上面的分析,三相电压可以合成为一个空间旋转矢量,根据三相电压的瞬时值就可以计算出旋转矢量的模|e|和幅角φe,
(5)
(6)
输出电压的相角φo必须与旁路电压的相角φb保持一致,同样采用上面的方法计算出输出电压相角φo的正弦和余弦值,通过一个调节器来调节输出电压的相位,就可以很好地实现锁相,原理框图如图2所示.
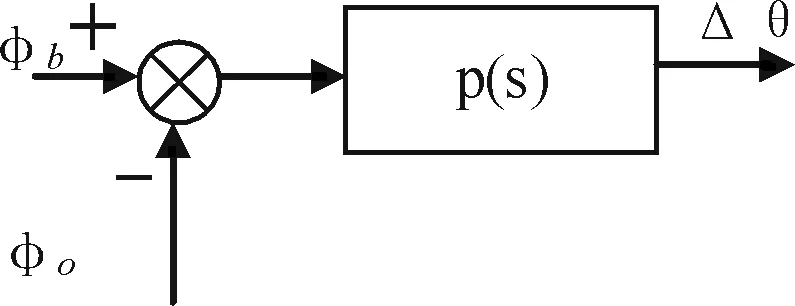
图2 锁相原理框图
由于计算相角要占用很多的资源,所以采用简化算法,可以使计算效率大幅度提高,即认为:
φb-φo≈sin(φb-φo)=sinφbcosφo-cosφbsinφo.
(7)
采用带有限幅的P调节器就可以较好的实现锁相跟踪,在旁路电压超出跟踪范围时,并联系统中的一台UPS输出50Hz标准正弦电压,其他UPS以它为基准,同样采用上面的方法进行锁相跟踪.
由于电网的输出可能带有很高的谐波成分,所以要求PLL的频率跟踪速度必须很慢,对于一般的大容量UPS,PLL的跟踪速度必须小于1 Hz/s.
1.2.2 UPS的并联控制方法 并联控制的目的是消除并联系统的3种环流——基波环流、开关频率环流和谐波环流.本系统通过瞬时有功和无功功率的调节来消除环流中的基波成分;通过一根开关频率同步信号线来消除开关频率的环流;通过合理地设计均流调节器参数,提高并联控制稳定性的方法消除谐波环流.
对于UPS来说,输出电压的动态响应速度是系统的一个重要指标,为了提高系统的动态响应速度,要求输出滤波电感越小越好,只要能够滤除PWM电压中的高频纹波成分即可;而从逆变器并联的角度出发,要求逆变器的动态响应速度不能太快,否则将引起并联系统不稳定,尤其是逆变器的输出滤波电感越大越好.
实际系统中采用隔离的环流检测方法,通过隔离方法检测输出的平均电流,即检测iL/n,将三相的平均电流信号变换至dq坐标系下,同时将iL/n与自身检测到的负载电流做差,求出环流信号,同样将环流信号变换至dq坐标系下.获得以上数据后,就可以实现系统的均流调节,调节方法见图3.
图3是并联算法的原理框图,整个并联系统中存在4个调节点,两个调节点作用于电流内环,一个调节点作用于电压外环,一个调节点作用于相位给定.
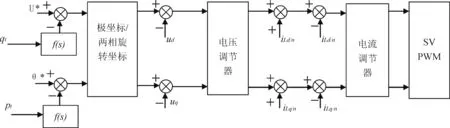
图3 逆变器并联的控制原理
单机逆变器实际上是一个电流调节器,在并联系统中,将前馈信号变成iL/n,即将每台UPS输出的目标电流作为电流内环的给定,目标的电流的d、q分量分别作用于控制系统的d、q轴,使并联系统具有非常好的动态性能.
图3中的均流调节器f(s)采用比例调节器.通过上述的方法即可消除环流中的有功和基波无功成分,但由于采用分散式并联,各台UPS的开关频率的差别将导致开关频率的环流产生,本系统采用一根同步信号线,定期(大约1 s)发送一个同步信号,消除了并联系统的开关频率环流.
2 实验结果
根据以上的原理,设计了单机功率为40 kW UPS系统,系统具有很好的稳定性,并且具有优良的稳态和动态均流效果,下面是两台UPS并联的实验结果,包括阻性负载、整流性负载和混合性负载的实验结果.
2.1 并联系统的稳态性能
空载运行往往是最恶劣的运行状况,如果控制不当,使环流中含有有功成分,很可能会引起吸收有功的UPS直流母线电压升高,损坏UPS内部的电池或直流电容,所以一些厂家的产品中在并联时串联一个电阻消耗这种情况下产生的有功环流,增加了系统的损耗.本系统无须增加任何耗能元件即可实现多机并联,完全消除了空载环流中的有功成分,图4是本系统的空载环流.
空载环流的有效值为0.45 A,从波形中可以看出,通过瞬时功率控制和开关频率同步控制,已经完全消除了基波和开关频率的纹波,只有少量谐波环流,是由系统的扰动引起的.
图5中,两台UPS的输出电流分别为29.2 A、29.4 A,总输出电流为58.55 A,不均流度为0.34%.
图6中,两台UPS的输出电流分别为46.1 A、46.4 A,总输出电流为92.45 A,不均流度为0.32%.
图7中,两台UPS的输出电流分别为31.98 A、32.48 A,总输出电流为64.45 A,不均流度为0.78%.
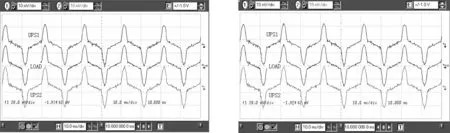
图6 整流性负载时的输出电流波形 图7 混合性负载时的输出电流波形 (UPS—50A/格;LOAD—100A/格) (UPS—50A/格;LOAD—100A/格)
图5、6和7都是在三相负载平衡的情况下进行的测试,从以上的波形可以看出,系统具有很好的稳态性能.
2.2 并联系统的动态性能
对于并联系统,动态稳定性远远比稳态均流精度重要,尤其在突卸负载时,容易发生动态不均流,严重时可能导致并联系统崩溃.并联系统的切换过程的动态调节特性也是衡量一个并联系统的重要指标,为了保证切换时间为零,逆变器与旁路在切换过程中必须有小于半个周波的重叠,所以对并联系统的同步跟踪精度、动态恢复过程都提出了很高的要求,本系统在保证稳态均流精度的前提下,具有很好的动态响应速度,下面是各种切换过程的波形.
图8是并联系统突加电阻性负载时的动态过程,图9是并联系统突减负载时的动态响应.从以上的波形可以看出,并联系统在动态过程中输出没有突变,都比较平滑地从一种状态切换至另一种状态,系统具有很好的动态性能.
从以上的实验结果看出,并联系统具有很好的均流精度,空载环流小于1 A,平衡性负载时不均流度小于1%,100%不平衡负载时的不均流度略有增加,在各种动态切换过程中都具有很好的稳定性和动态均流特性,说明本文提出的基于瞬时功率理论的均流方法是一种精度高,稳定性好的并联控制方法.

图8 并联系统在突加负载时的动态响应(100A/格) 图9 并联系统在突减整流性负载的动态响应(100A/格)
3 结论
本文提出了一种基于瞬时无功理论的全数字化分散式并联方法,给出了具体的实现手段和算法原理,最后给出了实验结果,证明了这种并联方法是一种实用的、具有很好的稳态和动态性能的并联方法,这种方法具有较好的稳定性和负载适应性,适合产品化应用.
参考文献:
[1] 段树成.UPS并联冗余技术的应用案例[J]. 自动化应用, 2011(3):3-6.
[2] 胡治中,邓丽芳.UPS的冗余连接及应用维护[J]. 江西电力, 2009,33(4):39-41.
[3] 单鸿涛,康 勇, 段善旭,等.新型模块化UPS并联数字均流控制技术研究[J]. 电气传动, 2008,38(5):39-42.
[4] 马运东,王 爽,王 芳,等.应用功率加权表决的逆变器并联同步控制[J]. 电工技术学报, 2011,26(3):110-115.
[5] 张 强,姚绪梁,张敬南. 大功率直流电源并联运行的均流控制[J]. 电力电子技术, 2011,45(3):73-75.
[6] 周星亮,梁 量,何国辉,等.基于环流功率理论的单相UPS并联均流控制设计[J]. 电源学报, 2011,42(2):1-6.
[7] 全亚斌.UPS电源系统的可用性设计[J]. 电源世界, 2011,42(2):55-58.
[8] 段善旭.模块化逆变电源全数字化并联控制技术研究[D].武汉:华中理工大学, 1999.
[9] 王宝忠,赵 静, 孙建涛.基于模糊自适应PI双闭环的UPS控制仿真研究[J]. 科学技术与工程, 2011,11(30):7370-7374.
[10] DUAN S X, LIU B Y. Parallel operation technique of inverters in UPS based on distributed logic control [J]. Power Elect, 2004,38(2):56-58.
[11] JOSEP M G, HANG L J, JAVIER U. Control of distributed uninterruptible power supply systems[J].IEEE Trans Indus Elect, 2008,55(8):2845-2859.
[12] 苏先进.基于TMS320C240控制器实现大功率并联UPS的锁相控制技术[J]. 电源世界, 2008,39(9):31-33.
猜你喜欢
粮食问题研究(2022年2期)2022-04-25
数学物理学报(2018年2期)2018-05-14
儿童故事画报·智力大王(2016年6期)2016-09-14
电测与仪表(2016年6期)2016-04-11
电源技术(2015年9期)2015-06-05
电测与仪表(2015年20期)2015-04-09
电测与仪表(2015年8期)2015-04-09
电测与仪表(2015年3期)2015-04-09
物理实验(2015年9期)2015-02-28
电测与仪表(2014年19期)2014-04-04
