
基于超声波测距的自动寻迹泊车系统模型设计*
2012-12-22 05:58戴绍港石学诚
电子器件 2012年2期
戴绍港 ,石学诚
(杭州电子科技大学通信学院,杭州310018)
自动泊车系统[1-7]是一种通过探测车辆周围环境信息来找到合适的泊车位,从而控制车辆的转向、速度,使得车辆能够自主驶入泊车位的系统。自动泊车技术是现代车辆智能化的研究热点之一,受到了越来越多的关注。虽然自动泊车系统还没有在汽车市场展开大规模的应用,但随着汽车和电子工业的发展,以及智能控制算法的研究与发展,自动泊车系统将得到更大的应用空间。相比于人工泊车事故率高、传统倒车雷达智能度低,自动泊车系统提高了车辆的智能化水平和安全性,进一步降低了新手司机驾驶车辆的难度,也为将来实现车辆的自动驾驶打下基础。
1 原理与算法设计
1.1 声源定位算法
在现有的麦克阵列声源定位方法中,基于时延估计的定位方法精度相对较高,且在实际中可以实时实现[8-9]。时延估计算法可采用广义互相关算法来实现,广义互相关法通过求两信号之间的互功率谱,并在频域内给予一定的加权来抑制噪声和反射的影响,再反变换到时域,从而得到两信号之间的互相关函数。该互相关函数的峰值位置即两信号之间的相对时延。
由于本系统中发射的信号为超声波信号,且整个系统(移动台与主控中心)是完全协同工作(合作)的模式,为了降低系统的复杂度与系统可实现性,可采用比较传统的时延估计方法,即利用系统中移动台发送超声波信号的同时告知主控中心,主控中心及时打开定时器,当主控中心判定收到信号时关闭定时器,然后计算两者的差值Δt,即可获得时延估计值。
考虑系统本身的要求,采用了二维的定位方法。假定移动声源的初始位置为S 点,即直角坐标为(rcosθ,rsinθ),同时把A 与B 两超声波接收器的位置也放于坐标系中,即A(-0.5,0),B(0.5,0),W 点为停车位置。由图1 可计算得到:

其中c 为超声波的传播速度,Δt 为时延估计值。移动声源S 向y 轴靠近时θ 角不断增大,当达到y 轴时θ 角为90°,则SA=SB,此时Δt=0,反之亦然。因此,当收到时延误差信号为0 时,则可以判定移动声源已达到OW 轴即坐标y 轴。同样的理论,当移动声源达到OW 轴之后,再向W 点前进时,可利用A 和C 两超声波接收器通过计算时延值来判定移动声源位置,当该时延值接近O 时,可断定该移动声源已到达W 点。
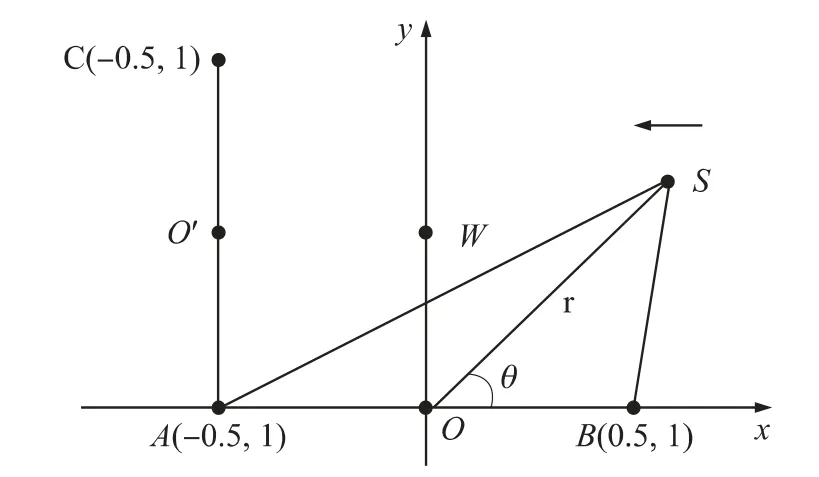
图1 二维声源定位图
1.2 超声波测距原理
超声波测距原理[10-11]为声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时,通过两者的时间t,利用公式:

计算障碍物距离,其中d 为发射器与障碍物之间的距离,v 为声波在介质中的传播速率,由下面的计算公式得到:

式中:τ为摄氏温度。
1.3 运动控制原理
当发出一个超声波脉冲时,移动台上的CPU 通过无线模块向接收站发送声源启动信号,由于无线模块的信号载波是2.4 GHz 电磁波,其在空间的传输时间较小可忽略不计。当主控中心接收到声源启动信号时,通知两个接收站分别打开各自的定时器,开始计时,同时侦听超声波信号。当收到超声波信号时,立即关掉定时器,计算移动台到达各站所用时间之差,然后将此差值信号通过无线传回移动台。差值越小表明距离目标位置越近,当差值接近零时,说明声源已到达目标,立刻停止。由上可知,用两接收站接收到超声波信号的时间差作为误差信号能够较好的控制移动台的运动状态。
2 系统的电路设计
2.1 系统的总体结构框图
根据系统的总体要求,所设计的系统总体结构框图如图2 所示,主要由主控中心和移动台(移动小车)两大部分组成,其中移动台由CPU 控制器单元、无线收发单元、超声波发射单元、以及移动台电机与其驱动单元等组成;主控中心则由CPU 控制与处理单元、无线收发单元、多组超声波接收器单元、以及显示单元等组成。
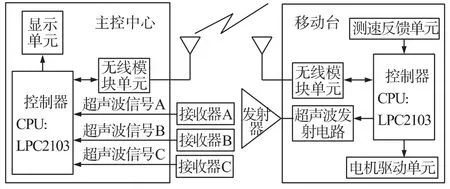
图2 系统的总体框图
系统设计的主要特点为:以飞利浦低功耗ARM芯片LPC2103 为核心处理芯片,包括电机驱动,无线传输,超声波信号产生与接收,LCD 显示等功能模块组成,使超声波收发与无线模块之间协调工作,让单片机能将移动台与接收站的数据实时反馈形成闭环系统,进而大大地提高了系统的稳定性与精确性。
2.2 系统主要硬件设计
2.2.1 超声波发射与检测接收电路
接收电路如图3 所示。
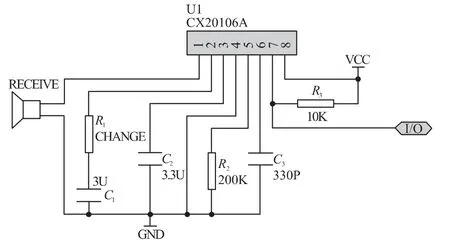
图3 超声波接收电路原理图
在移动台端,通过超声波发射器发出方波脉冲,其频率为39 kHz。3 个检测站(A,B,C)采用超声波接收探头和CX20106A 芯片作为接收处理电路,调节该芯片第2 脚与地之间的电阻及电容可调节芯片的灵敏度,实际设计时,采用电位器与3 μF 的电容串联,然后调节电位器的阻值,使系统输出增益达到最大值;同时调节第5 脚的外接电阻(实际阻值为200 kΩ),可改变接收频率,使之达到39 kHz 左右。接收站可以接收到衰减较少的超声波信号,进而通过CPU 判断各个接收端与移动移动台的之差,最终转化为控制移动台移动的指令。
2.2.2 无线收发电路
系统采用Nordic 公司的nRF24L01 无线收发模块[12-13],其工作在2.4 GHz,外围电路简单,只需极少量的外围电感、电容、电阻,即可构建一个完整的通信模块。如图4 所示,其中天线这里采用铜线,在阻抗匹配的条件下,能传输较远的距离,且能满足系统要求。
3 软件设计及系统工作流程
系统工作流程如图5 所示,在软件程序设计时,要考虑系统程序通过无线收发模块使主控中心和移动台形成闭环系统。移动台发送超声波脉冲的同时,无线模块发送计时信号开启定时器计算移动台与主控中心的两接收站之间的实时时间差,当此时间接近零时,主控中心发送无线信号,控制电机作相应制动。

图5 系统工作流程图
4 系统测试
4.1 测试条件与方法
根据图1 按照实际停车位的5 ∶1比例在W 点设置模型车位,首先把3 个超声波接收站分别放到规定的位置A,B,C 上,其次按照要求,把装有无线收发模块的移动车模放到OW 线右侧50 cm 处位置,通过超声波引导让其到达指定位置,记录停止位置与指定位置之间的距离、整个过程的时间,并与指标的要求误差范围和速度进行比较。
4.2 测试数据结果
测试结果如表1 所示。
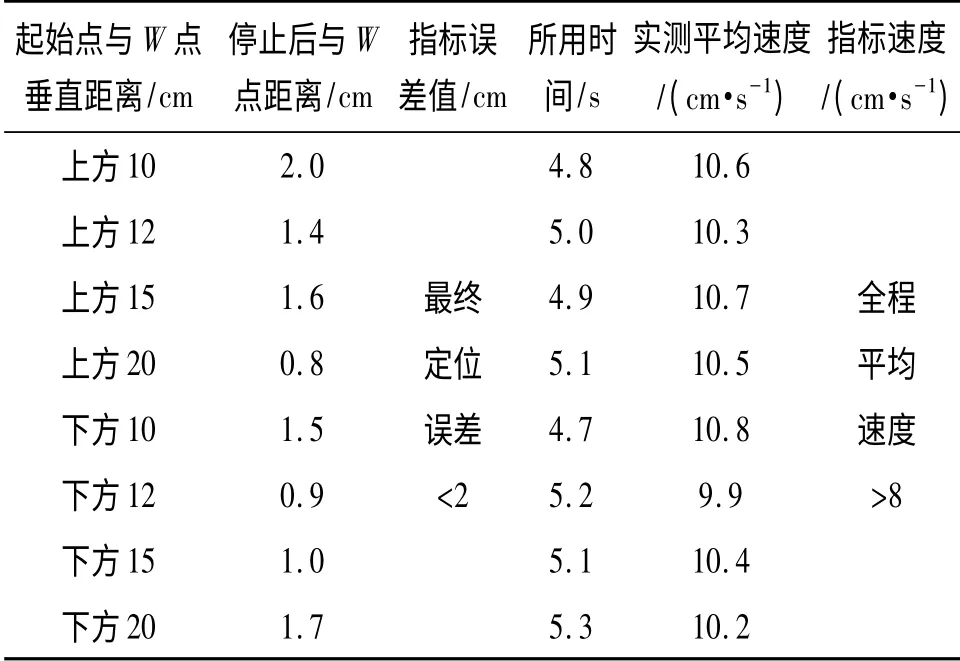
表1 OW 右侧的车模驶向W 点(在OW 上)时的测试结果
5 结论
本文所提出的利用超声波测距原理来引导汽车的自动寻迹与泊车系统模型,巧妙的利用了信号特征实现对载有超声波的移动台进行精确引导。由于超声波传感器的良好特性,选用多个超声波传感器组成传感器系统,通过编组协同工作,用来探测有效车位和车辆相对位置,具有一定的创新性,且功耗低,具有很大的成本上的优势。
[1] Massaki Wade,Kang Sup Yong,Hideki Hashimoto.Development of Advanced Parking Assistance System[J]. IEEE Transactions on Industrial Electronics,2003,50:4-16.
[2] Chiu Chian-song,Lian Kuang-yow,Liu Peter.Fuzzy Gain Scheduling for Parallel Parking a Car Like Robot[J]. IEEE Transactions on Control Systems Technology,2005,13(6):1084-1092.
[3] Paul Green. Parking Crashes and Parking Assistance System Design:Evidence from Crash Databases,the Literature and Insurance Agent Interviews[J]. SAE World Congress,2006,1:1685-1700.
[4] 郭孔辉,姜辉,张建伟,等.基于模糊逻辑的自动平行泊车转向控制器[J].吉林大学学报(工学版),2009,39(2):236-240.
[5] 何建国,张文胜,赵根庄. 智能泊车引导方法的研究与实现[J].地理空间信息,2007,5(2):3-5.
[6] 付菊芳,张小龙,东亚斌. 国外汽车自动停车系统的介绍与分析[J].中国科技信息,2009,(2):259-26.
[7] 何峰.一种应用于自动泊车系统的车位检测方法[J]. 传感器世界,2009,3(1):24-27.
[8] 崔玮玮,曹志刚,魏建强.声源定位中的延时估计技术[J]. 数据采集及处理,2007,22(1):90-99.
[9] 孙韶杰,孙绍俊,李国辉,等.一种改进的声测定位时延估计算法[J].计算机应用,2006,(11):2696-2723.
[10] 许天增,许克平,许茹,等.超声传输特性和超声传感系统研究[J].厦门大学学报,2001,2:34-35.
[11] 田燕. 超声波的物理特性及应用[J]. 现代物理知识,1996,11(1):7-9.
[12] 张克满,史仪凯.基于DSP 和nRF2401 芯片的数字无线视频采集系统设计[J].微电子学与计算机,2005,(3):93-95.
[13] 廖平,乔刚. 基于nRF2401 的近距离点对多点无线通信系统[J].现代电子技术,2006,(11):18-20.
猜你喜欢
汽车实用技术(2022年19期)2022-10-19
舰船科学技术(2022年11期)2022-07-15
汽车实用技术(2022年7期)2022-04-20
煤气与热力(2021年9期)2021-11-06
煤气与热力(2021年7期)2021-08-23
化工管理(2021年7期)2021-05-13
军民两用技术与产品(2020年3期)2020-04-07
电子制作(2019年23期)2019-02-23
噪声与振动控制(2016年5期)2016-11-09
天然气与石油(2015年2期)2015-02-28
