
三种湍流模型对导管螺旋桨空化性能计算的比较
2013-02-07 02:53周其斗潘雨村
中国舰船研究 2013年2期
李 超,周其斗,潘雨村,陶 山
海军工程大学舰船工程系,湖北武汉430033
0 引 言
空化是在水力机械中和高速水下航行体表面经常发生的现象。空化的发生常常导致水力机械过流部件表面严重破坏,并产生强烈的空化噪声。与此同时,对于螺旋桨,还常伴随着推进效率的下降。由于空化测试成本较高,如何准确地对空化流动进行数值模拟一直是计算流体动力学(CFD)领域关心的问题。目前,对于螺旋桨不考虑空化条件下的性能计算已经比较成熟[1-2]。在近年的研究中,常采用在两相流模型[3]的基础上增加空化模型来进行空化模拟。在各种空化模型[4-5]中,Rayleigh-Plesset 空化模型应用较广泛,并获得了较好的计算结果[6]。湍流模型常选择标准k-ε 模型[7],钱忠东等[8]对不同湍流模型对水翼性能数值计算的影响进行了对比分析,但对不同湍流模型对螺旋桨空化性能模拟计算精度的影响缺少必要的研究。
本文将以某单位设计的BD12+D4-70 型导管螺旋桨为例,借助通用计算流体力学软件,采用Rayleigh-Plesset 空化模型和3 种不同的湍流模型,对该桨在3 个不同空化数条件下进行了数值模拟,得到在不同湍流模型、不同空化数条件下导管螺旋桨的空泡性能,并与已有试验数据进行比对。同时,还将分析不同湍流模型、不同空化数对桨叶、导管相关空泡性能计算的影响,定性的比较3 种湍流模型对空化数的敏感程度。
1 数学模型
采用Rayleigh-Plesset 空化模型,在该空化模型的控制方程方面,连续方程为

动量方程为

空化过程描述方程为

式中:μt为涡粘系数;SM为流体质点所受的质量力;RB为气泡半径;pv为汽化压力;p 为环境压强;ρf为液体的密度;σ 为气泡与液体之间的表面张力系数。
在确定涡粘系数μt时,将其与湍流时均参数联系起来,即形成湍流模型。本文为了比较不同湍流模型对空化模拟结果的影响,分别采用了标准k-ε 模型、RNG k-ε 模型和k-ω 模型。
1.1 标准k-ε 模型
在标准k-ε 模型中,湍动能和耗散率的控制方程为

式中:Sk和Sε为用户自定义的源项;μt为湍流粘性系数;模型常数为cμ=0.09,c1=1.44,c2=1.92,σk=1.0,σε=1.3。
1.2 RNG k-ε 模型
RNG k-ε 模型是基于重整化群(Renormaliza⁃tion Group)的理论提出,经改进,其控制方程与标准k-ε 模型形式相同,但模型常数略有差异:cμ=0.085,c2ε=1.68,σk=σε=0.717 9 。主 要 区别在于,c1不再是常数,而是表示为η(湍流时间尺度与平均应变率之比)的函数:
式中,η0=4.38;β=0.015。 RNG k-ε 模型增加了平均应变率的影响。
1.3 k-ω 模型
式中:β′=0.09;α=5/9;β=0.075;σk=2;σω=2。
2 计算模型
本文的具体研究对象是由某单位设计的BD型导管+D 系列螺旋桨。导管的剖面形状和螺旋桨叶片展开轮廓图如图1 所示。桨叶直径为0.24 m,螺距比为1.4,盘面比为0.7,共有4 片桨叶,导管内壁与桨叶叶梢间隙为1.5 mm。
在此基础上,利用Gambit 对该导管螺旋桨进行了三维建模,如图2 所示。本文的数值模拟采用多重参考系MFR 方法,将流域分为静域和动域。螺旋桨所在区域(区域1)为动域,其余为静域(区域2~区域5)。

图1 导管剖面图和螺旋桨叶片展开轮廓Fig.1 Section plane of duct and propeller blade

图2 计算采用的导管螺旋桨的几何外形、表面网格和流域划分Fig.2 Geometry of ducted propeller,surface grids and partitions of fluid domain
导管螺旋桨所在的流域为一个长2.8 m,直径1.6 m 的圆柱形区域,流域被分为5 个部分进行网格划分。由于导管螺旋桨的几何模型较复杂,因此,在区域1 和区域2 采用适应性强的非结构化网格进行划分,而在区域3~区域5 则选用六面体单元划分网格。此计算模型共有512 444 个节点,2 447 659 个体单元(其中无高度倾斜的体单元)。
进行数值计算时,均使用相同的边界条件:进口为均匀来流,入流速度为3 m/s;出口选取CFX中outlet 的static pressure 条件;叶片、导管和桨毂采用无滑移绝热壁面条件;远场区域速度与来流相同;动、静域之间采用CFX 中以GGI 方式连接的Frozen Rotor 参考坐标系转换方法。在进行空化性能计算时,汽化压力选为25℃时水的汽化压力,为3 574 Pa。
3 数值计算结果
由试验图谱可知,在空化数为σ =2.4,3.3,4.5这3 种情况下,在进速系数J = 0.6~0.9 时,空化性能与无空化的敞水性能相差较大。因此,在进行计算时,进速系数的选取范围为0.6~0.9。可通过保持入流速度不变,调整螺旋桨转速来改变进速系数。
3.1 不考虑空化的敞水性能计算结果
由于空泡计算对计算的初始值要求较高,因此本文在进行数值模拟时先不考虑空泡,先采用3 种不同的湍流模型对导管螺旋桨的敞水性能进行计算,待其收敛后再以此时的值为初始值,分别用不同的湍流模型进行空泡性能计算。根据在不考虑空泡情况下的计算结果,得出在J = 0.6,0.7,0.8,0.9 处的敞水性能KT,KQ,η 与试验所得的敞水性能曲线对比如图3 所示。
3 种不同湍流模型计算的相对误差如表1 所示。由表中可看出,推力系数KT、扭矩系数KQ及推进效率η 的计算结果误差均约为5%,满足工程预报的要求,同时,也证明了采用数值模拟计算导管螺旋桨敞水性能的可靠性。
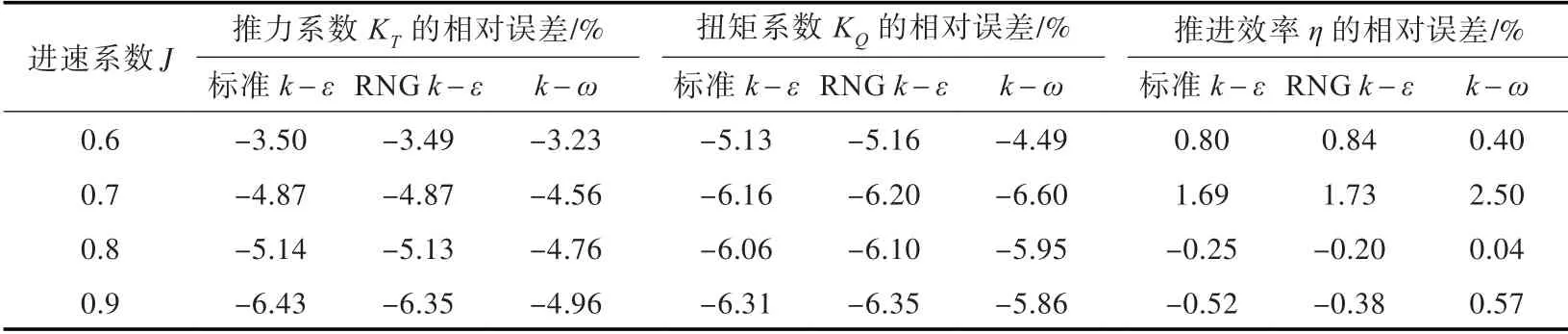
表1 3 种不同湍流模型计算的相对误差Tab.1 Calculation errors of different turbulence models

图3 不同湍流模型的敞水性能计算结果Fig.3 Open water performance calculated by different turbulence models
3.2 不同空化数下的空泡性能计算结果
空化数σ 是空化流动的一个重要参数,直接影响着空泡的大小及空化发生的位置,进而影响到空化性能。本文对空化数σ = 2.4,3.3,4.5 这3种不同的情况进行了空泡性能计算。在定义出口为static pressure 条件时,输入的相对压力即为远场的环境压力,空化数的调整是通过改变此环境压力来实现的。计算结果与试验数据的对比如图4~图6 所示。

图4 标准k-ε 湍流模型的空泡性能计算结果Fig.4 Cavitation performance calculated by standard k-ε model
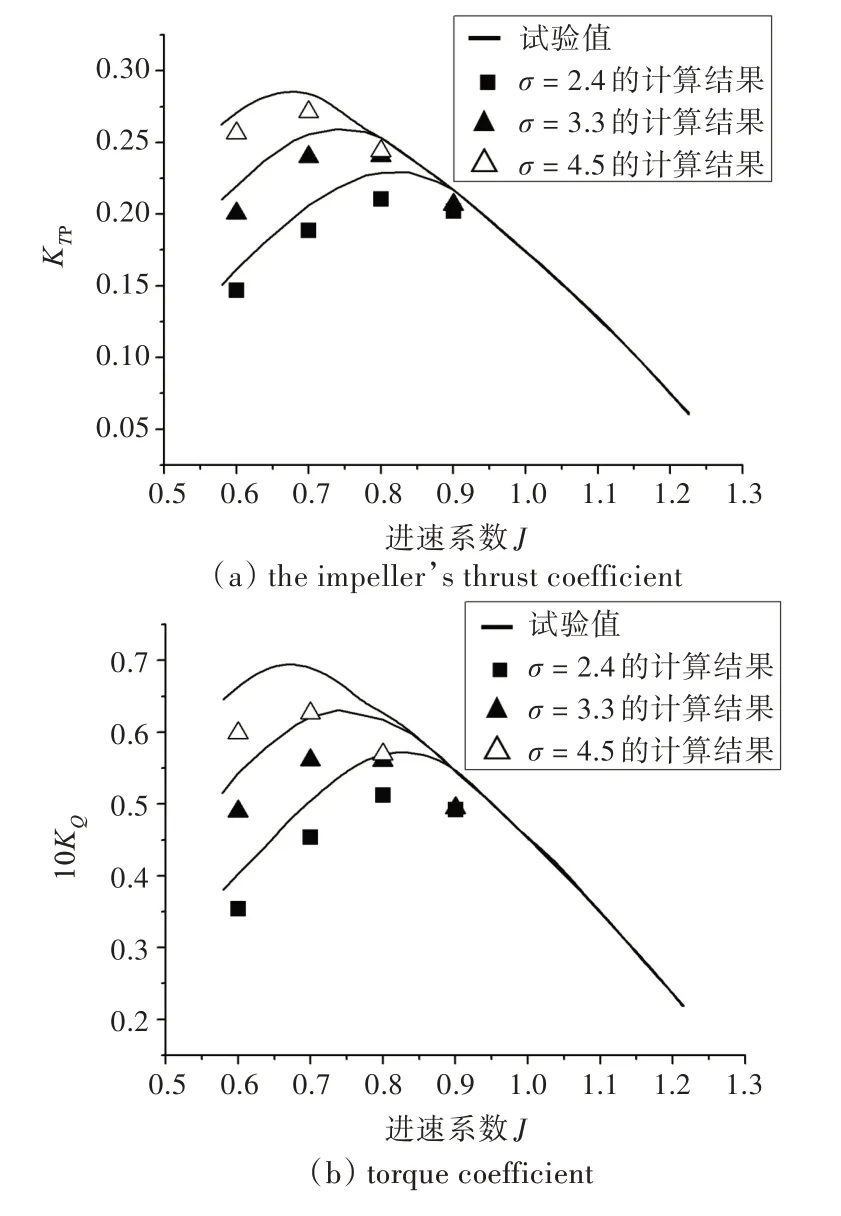

图5 RNG k-ε 湍流模型的空泡性能计算结果Fig.5 Cavitation performance calculated by RNG k-ε model
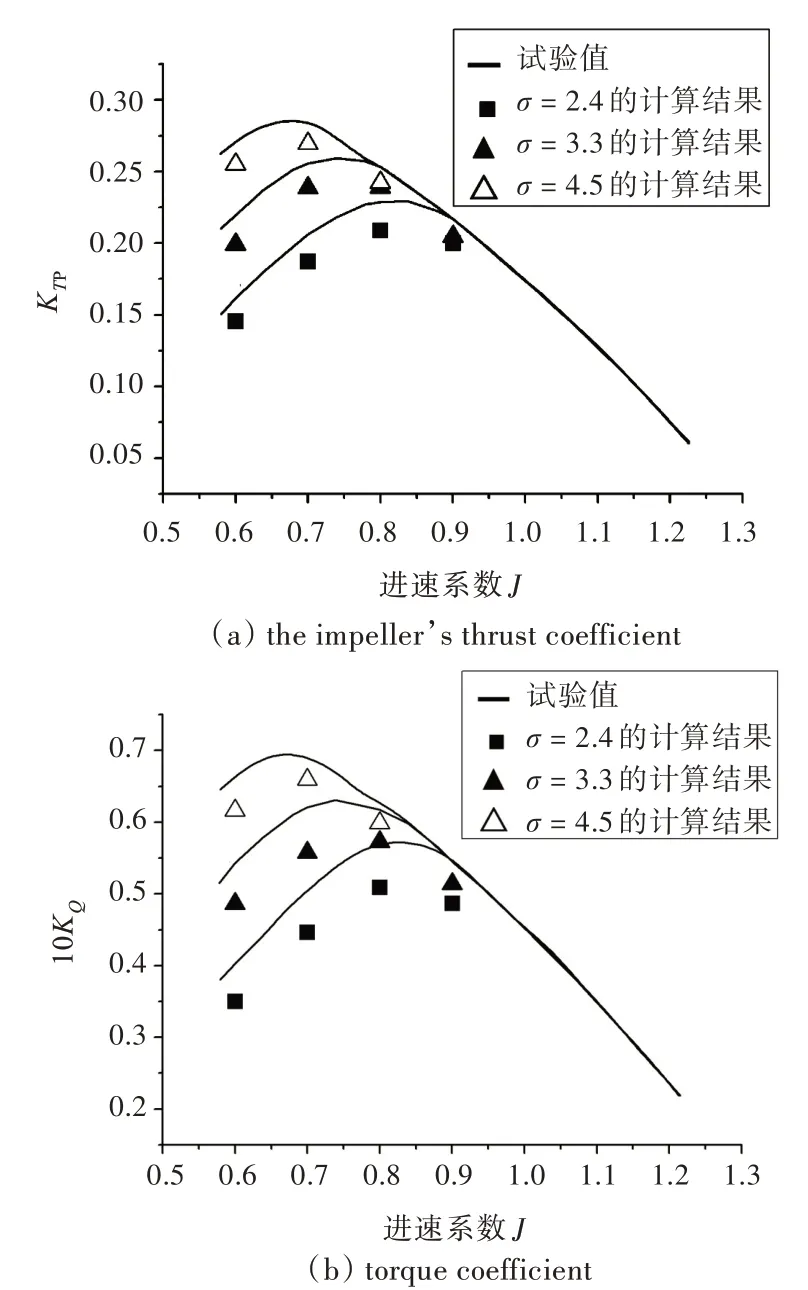
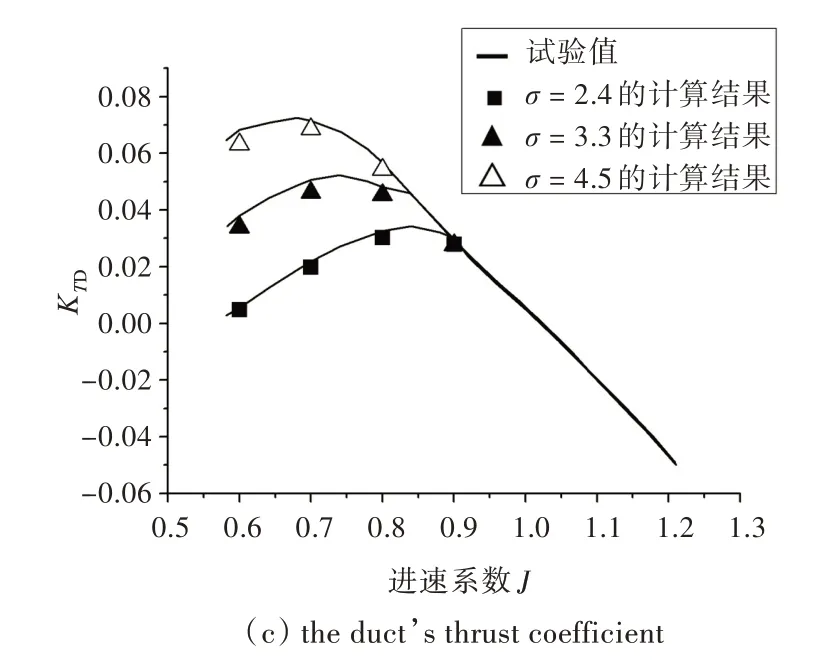
图6 k-ω 湍流模型的空泡性能计算结果Fig.6 Cavitation performance calculated by k-ω model
4 计算结果对比与分析
4.1 相同空化数不同湍流模型的计算结果比较分析
在相同空化数条件下,对不同湍流模型计算结果的相对误差进行了比较,如表2 所示(以σ =3.3 为例,其他空化数条件下的规律相似)。由表中数据可知,标准k-ε 模型与RNG k-ε 模型的计算结果相当接近;在计算桨叶的推力系数KTP和扭矩系数KQ时,k-ω 模型相比其他两种模型计算误差稍大,但仍在允许范围内,推进效率η 的计算误差均在5%以内,符合工程预报的要求。
另外,从表中还可以看到,随着进速系数的增大,误差逐渐减小。尤其是在计算扭矩系数时,当J <0.8 时,相对误差较大,最大达到了10%以上(k-ω 模型,J = 0.6 时),而当J = 0.9 时,相对误差则明显较小。

表2 σ =3.3 时3 种不同湍流模型计算的相对误差Tab.2 Calculation errors of different turbulence models at σ =3.3
在计算过程中,发现相对于另外两种模型而言,k-ω 模型计算所用时间更短,并且更加容易收敛。这种情况与文献[1]中计算螺旋桨敞水性能时的情况相似。
另外,对于导管螺旋桨的数值计算,还要考察导管推力系数的计算结果。同样以σ =3.3 时的情况为例,3 种湍流模型的导管推力系数的计算结果相对误差如表3 所示。由表中数据可以看出,在进速系数较低时,如J =0.6,0.7 时,标准k-ε 模型与RNG k-ε 模型的计算结果严重失真,误差最大接近20%(RNG k-ε 模型,J =0.6时),而k-ω 模型的计算结果则比较稳定,始终控制在10%左右。
综合以上情况可知,k-ω 模型更适于导管螺旋桨空化性能的计算。
4.2 相同湍流模型不同空化数的计算结果比较分析
同一种湍流模型在不同空化数条件下的计算精度并不相同。其中,k-ω 模型对于不同空化数的计算精度如表4 所示,其余两个模型的规律与之相似。由表4 可以发现,σ = 2.4 时的计算精度最差,随着空化数的增大,计算精度随之上升。众所周知,在较低的空化数条件下,空化的发生与发展均相对较剧烈;在较低的进速系数(σ <0.7)下,桨叶推力系数的计算精度仍在10%以内,而扭矩系数KQ的计算精度则较差,相对误差最大达到13%(σ = 2.4,J = 0.6 时)。进速系数的减小,相当于入流速度不变,螺旋桨转速增加,从而导致螺旋桨的空化愈发剧烈。以上两种情况可以总结为,当空化较剧烈时,数值计算精度将会下降,其原因可以归结为两点:一是本文选用的Ray⁃leigh-Plesset 空化模型是一种简化的空化模型,对于比较剧烈、复杂的空化,模型失真比较大,从而造成计算精度的下降;二是当空化发生剧烈时,对网格质量的要求也进一步提高了,但原有的网格并没有相应改进,从而造成计算精度下降。
同样,仍以k-ω 模型为例考察导管推力系数的计算精度。不同空化数条件下的计算相对误差如表5 所示。由表中可以看出,当σ = 2.4时,计算结果误差较大,随着空化数的增大,误差逐渐降低。这种情况同样可以用上面所述的两点原因解释。

表4 k-ω 湍流模型不同空化数下数值计算相对误差Tab.4 Calculation errors of k-ω turbulence model at different cavitation numbers
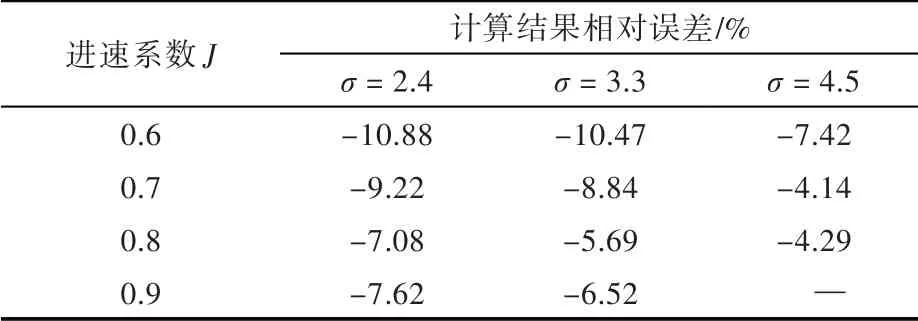
表5 不同空化数下k-ω 模型计算导管推力系数的相对误差Tab.5 Calculation errors of duct's thrust coefficient by k-ω turbulence model at different cavitation numbers
4.3 不同湍流模型对空化数的敏感性
不同的湍流模型对空化数的敏感程度不同。以进速系数J = 0.7 为例,桨叶推力系数与扭矩系数的计算相对误差的浮动情况如图7 所示。由图中可以看出,在计算桨叶推力系数时,在不同空化数条件下,3 种模型计算的相对误差波动相似,但在扭矩系数的计算中,k-ω 模型的计算相对误差随空化数的改变而变化较大。这说明k-ω 模型对空化数比较敏感。因此,对于不同的空化数,计算精度相差会较大。相比k-ω 模型,k-ε 模型和RNG k-ε 模型对空化数不敏感,对于不同的空化数,计算时,计算精度相差较小。
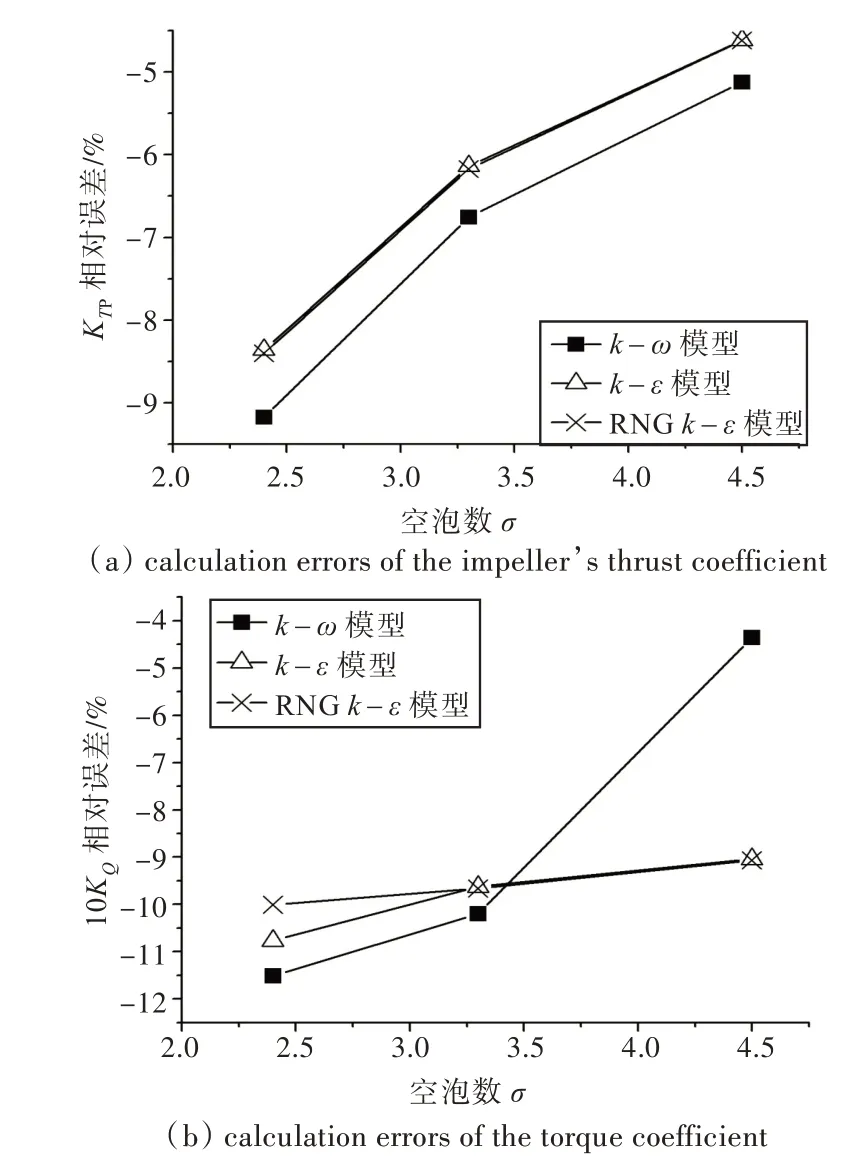
图7 J =0.7 时不同湍流模型计算相对误差波动Fig.7 The variation of calculation errors of different turbulence models at J =0.7
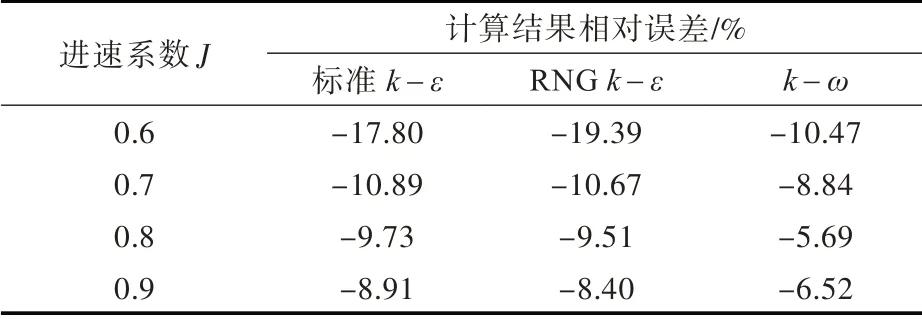
表3 σ =3.3 时3 种不同湍流模型计算导管推力系数的相对误差Tab.3 Calculation errors of duct's thrust coefficent by different turbulence models at σ =3.3
5 结 论
本文借助于CFD 软件,采用结构化与非结构化网格相结合的方法,对导管螺旋桨的空泡性能进行了数值模拟,对比分析了不同湍流模型、不同空化数条件下的计算结果精度,得出以下结论:
1)在对导管螺旋桨进行不考虑空化的敞水性能计算时,3 种湍流模型的计算精度均较好,满足工程预报的精度要求。
2)对导管螺旋桨进行空化性能计算时,标准k-ω 模型更加稳定,计算所用时间更短,且更加容易收敛。但对于桨叶推力系数的计算,k-ω 模型的计算精度不及标准k-ε 模型与RNG k-ε 模型,但是三者的计算相对误差都在允许范围内。在对导管推力系数的计算中,尤其是在低进速系数下,标准k-ε 模型和RNG k-ε 模型严重失真,但是k-ω 模型的计算精度仍然能够得到保证。综合以上情况,k-ω 模型相比标准k-ε 模型和RNG k-ε 模型更加适合导管螺旋桨的空化性能计算。
3)在空化数或进速系数较低时,空化的发生相对来说会较剧烈,在这种情况下进行空泡性能的计算计算精度不理想。若想提高精度,需要选取更为精确的空化模型,或进一步调整网格,提高网格质量。
4)在不同空化数条件下,标准k-ε 模型与RNG k-ε 模型计算的相对误差波动较小,而k-ω模型则较大。这说明在计算时,k-ω 模型对空化数σ 比较敏感。
[1]吕晓军,周其斗,纪刚,等.导管螺旋桨敞水性能的预报和比较[J]. 海军工程大学学报,2010,22(1):24-30.LV Xiaojun,ZHOU Qidou,JI Gang,et al. Prediction and comparison of open water performance of ducted propeller[J]. Journal of Naval University of Engineer⁃ing,2010,22(1):24-30.
[2]曾文德,王永生,刘承江. 混流式喷水推进器水动力性能的数字模拟[J]. 武汉理工大学学报,2010,32(6):95-100.ZENG Wende,WANG Yongsheng,LIU Chengjiang.Numerical simulation of hydrodynamic performance of the mixed flow pump for marine waterjet propulsion[J]. Journal of Wuhan University of Technology,2010,32(6):95-100.
[3]YAN Weicheng,SHI Depan,LUO Zhenghong,et al.Three-dimensional CFD study of liquid-solid flow be⁃haviors in tubular loop polymerization reactors:The ef⁃fect of guide vane[J]. Chemical Engineering Science,2011,66(18):4127-4137.
[4]杨琼方,王永生,张志宏. 螺旋桨空化崩溃性能图谱的多相流模拟[J]. 华中科技大学学报(自然科学版),2012,40(2):18-22.YANG Qiongfang,WANG Yongsheng,ZHANG Zhi⁃hong. Multiphase flow simulation and propeller cavita⁃tion breakdown performance maps[J]. Journal of Hua⁃zhong University of Science and Technology(Nature Science),2012,40(2):18-22.
[5]杨琼方,王永生,张志宏. 非均匀进流对螺旋桨空化水动力性能的影响[J].水动力学研究与进展,2011,26(5):538-550.YANG Qiongfang,WANG Yongsheng,ZHANG Zhi⁃hong.Effects of non-uniform inflow on propeller cavita⁃tion hydrodynamics[J]. Chinese Journal of Hydrody⁃namics,2011,26(5):538-550.
[6]杨正军,王福军,刘竹青,等. 基于CFD 的轴流泵空化特性预测[J]. 排灌机械工程学报,2011,29(1):11-15.YANG Zhengjun,WANG Fujun,LIU Zhuqing,et al.Prediction of cavitation performance of axial-flow pump based on CFD[J]. Drainage and Irrigation Ma⁃chinery,2011,29(1):11-15.
[7]余云超,张伟,陈红勋. 轴流泵模型汽蚀特性的数值模拟[J].上海大学学报(自然科学版),2011,17(5):653-656.YU Yunchao,ZHANG Wei,CHEN Hongxun. Numeri⁃cal simulation of cavitation behavior of axial pump mod⁃el[J]. Journal of Shanghai University(Natural Sci⁃ence),2011,17(5):653-656.
[8]钱忠东,黄社华.四种湍流模型对空化流动模拟的比较[J].水科学进展,2006,17(2):203-208.QIAN Zhongdong,HUANG Shehua. Comparison and analysis of computed results for cavitating flow with four turbulence mode[J]. Advances In Water Science,2006,17(2):203-208.
猜你喜欢
流体机械(2022年8期)2022-10-13
大电机技术(2022年4期)2022-08-30
火箭推进(2022年2期)2022-05-14
上海交通大学学报(2021年8期)2021-09-02
数字海洋与水下攻防(2021年2期)2021-05-08
流体机械(2021年1期)2021-02-23
广东造船(2018年1期)2018-03-19
舰船科学技术(2017年11期)2017-11-27
船海工程(2015年4期)2016-01-05
建筑科学与工程学报(2014年1期)2014-08-08
