
新型汽车扭振减振器扭振特性试验研究
2013-02-13 06:34徐红亮龚宪生杨俊杰
振动与冲击 2013年6期
徐红亮,龚宪生,廉 超,杨俊杰
(1.重庆大学 机械传动国家重点试验室 机械工程学院,重庆 400044;2.天津中德职业技术学院,天津 116622)
扭振减振器是汽车传动系减振、隔振和缓冲振动的重要控制装置[1],是改善汽车发动机工作质量,提高寿命,降低噪声的重要保证[2]。它的实际工作特性直接影响着汽车乘坐的舒适性和运行的平顺性。传统的离合器从动盘式扭振减振器(Clutch Torsional Damper,CTD)[3]因其扭转角度小、刚度大、占用空间大等原因,不能满足日益提高的减振需求,取而代之最典型的双质量飞轮扭振减振器(Dual Mass Flywheel,DMF)[3],目前虽然在国外得到了广泛应用[4-5],但在国内由于受到各种因素的制约还不能量产,主要以引进的方式应用于中高级轿车[5]。因此,笔者与某公司合作研发了一款新型汽车扭振减振器,并对该减振器的动态工作特性进行试验,建立减振器混合阻尼动力学模型,研究其动力学扭振特性,掌握影响此类扭振减振器自身功能的因素,为汽车减振器的动力学设计和动力优化提供必要条件。
1 动态扭振试验研究
1.1 试验背景
扭振减振器的工作特性可能随动态条件的变化而变化,并且由于扭振减振器的恢复扭矩对激励频率、扭转振幅的敏感特性[7-8],有必要对其动力学特性进行深入研究,优化设计出高性能的扭振减振器,为此需要对减振器进行动态条件下的扭振试验:
(1)获取扭振减振器动力学建模和参数辨识所需要的扭振振幅、扭矩等数据;
(2)通过试验数据分析处理得到扭振减振器的刚度、阻尼与振幅、频率之间的某些特性,为减振器的动态特性建模和参数辨识提供试验依据。
1.2 新型扭振减振器结构特点
新型扭振减振器弹性机构采用的是周向短直弹簧,并将三个短直弹簧并联形成组合弹簧,再借助于弹簧帽、滑块、驱动块将三组组合弹簧串联,周向均匀分布在弹簧室内,各组合弹簧对应的零件结构参数和布置参数均相同,弹簧室内涂抹有阻尼油脂,起到衰减传动系统通过共振区时的振幅。

图1 新型减振器结构示意图Fig.1 Structure of New type damper
新型扭振减振器主要由主动端、弹性机构和从动端组成。主动端包括外壳一、外壳二和驱动块,其中驱动块通过铆钉与外壳一和外壳二相连接,然后两个外壳通过螺栓连接为一个整体,从而构成主动端,在车辆轴系中,主动端通过螺栓与发动机输出飞轮连接在一起;从动盘通过花键与变速器输入轴相连接,构成减振器的从动端。主、从动端通过滑动轴承连接可以实现两部分的相对转动;弹性机构由一级弹簧和二级弹簧组成,其中二级弹簧的扭转刚度大于一级弹簧的刚度。新型扭振减振器的结构如图1所示。
1.3 试验设计及数据采集
为获得减振器恢复扭矩与各振动参量之间的关系,可从一般振动系统微分方程[9]出发:

其中:J为减振器的转动惯量;Q为激励扭矩;T为减振器恢复扭矩,是角位移θ、角速度、振幅φ和激励频率f的非线性函数。于是进行减振器系统在不同频率与不同振幅组合作用下的正弦加载试验,预定扭振试验激励频率为 2-10 Hz,振幅分别为 5°、10°、15°、20°、26°、27°、28°、30°(根据试验设备允许的条件选取)。加载过程首先固定激励频率,不断增加扭转角度,直至某一频率状态下再也不能增加振幅为止;然后换一个新的频率重复上述步骤,得到不同工况下的转角-时间、扭矩-时间历程曲线及数据。
试验研究工作是在某减振器公司试验中心进行的,采用的是计算机控制电液伺服扭转疲劳试验机(型号:ZYS-BJQPL),试验测试结构系统如图2所示,减振器的主动部分与试验机的摆动盘联接,从动部分与试验机的固定支架固接,通过试验机摆动盘的往复摆动,使减振器处于往复摆动的正常工作状态。减振器的输出角度和扭矩信号由系统本身的角度传感器、扭矩传感器测取,经过放大后输入数据采集系统,数采系统并对这些信号进行分析处理。

图2 测试系统Fig.2 Test system
1.4 试验结果分析
为了使试验结果的表达更直观,文中仅从众多试验结果中选出部分工况进行分析。
(1)激励频率对减振器性能的影响
对扭振减振器进行动态扭振试验,图3(a)为减振器在激励频率分别为 2、3、…、9、10 Hz,振幅为 5°时的迟滞回线;图3(b)为减振器在激励频率分别为2、3、…、6、7 Hz,振幅为 10°时的迟滞回线。
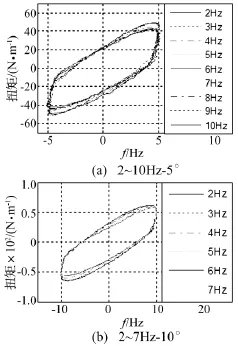
图3 振幅为定值,频率变化时迟滞回线Fig.3 Constant amplitude hysteresis loops
由图3中迟滞回线比较可知,在不同激励频率振动下扭振减振器的各迟滞回线有变化,迟滞回线所包围的面积随着频率的增大而相应减小,也就是随着频率的增大减振器阻尼耗能相应减小,即减振器的阻尼耗能与频率变化有关;不同激振频率对减振器各迟滞回线之间平行度影响甚微,于是可知减振器扭转刚度随频率的变化不明显,可以认为减振器的扭转刚度与频率的变化无关。
(2)扭振振幅对减振器性能的影响
对扭振减振器进行动态扭振试验,图4(a)所示为减振器在激励频率为 2 Hz,振幅分别为 5°、10°、15°、20°、26°、27°、28°、30°时的迟滞回线;图 4(b)所示为减振器在激励频率分别为 3 Hz,振幅为 5°、10°、15°、20°、26°、27°时的迟滞回线。

图4 频率为定值,振幅变化时迟滞回线Fig.4 Constant frequency amplitude variation hysteresis loops
由图4中迟滞回线比较可知,随着振动幅值的增大,扭振减振器迟滞回线所围成的面积越来越大,也就是减振器的阻尼耗能与振幅变化有关,表明扭振减振器在振动中随着振动幅值的增大,消耗的能量也随着增大,其减振特性逐步增强;随着振幅的增大减振器各迟滞回线之间倾斜程度逐渐变的平缓,也就是其扭转刚度逐渐减小,即减振器动扭转刚度与振动幅值有关。
2 扭振特性数学模型
在对干摩擦模型[10]、双线性模型[11-12]、一阶非线性微分方程[13-15]、迹法模型[16]等非线性动力学模型及减振器动态试验迟滞回线研究后可知,在低频率低振幅的情况下,迟滞回线近似于干摩擦数学模型,随着频率及振幅的增大,在它们综合作用下,兼有摩擦阻尼及粘性阻尼特性;双线性模型与减振器的动态迟滞回线外形相近,故其动态迟滞回线则适宜以双线性模型为基础来描述,同时对双线性模型进行一定改进,即可将系统刚度系数处理成线性刚度,阻尼处理为混合阻尼模型[6,17],足以描述减振器的非线性迟滞动态振动特性。于是可以认为迟滞回线是由作为基架线的弹性扭矩部分和作为迟滞环的阻尼扭矩部分组成

其中,T为减振器恢复扭矩,Tk为弹性扭矩部分,Tc为迟滞阻尼扭矩部分。
考虑一般情况,由动态试验研究可知,减振器恢复扭矩数学模型是频率f和振幅φ的函数;并且减振器扭转刚度是振幅的函数,阻尼系数是频率及振幅的非线性函数,于是建立减振器恢复扭矩数学模型[18-20]如下

在处理具有阻尼的振动系统问题时,以粘性阻尼处理最为方便,因此要将它转换成在效应上与粘性阻尼相当的粘性阻尼系数。粘性阻尼系数确定方法是:在每一循环振动中,非粘性阻尼耗散的能量与粘性阻尼耗散的能量相等时计算的阻尼系数,则减振器恢复扭矩数学模型可以进一步表示为

其中K(φ)为减振器扭转刚度函数,C(φ,f)为减振器阻尼函数,φ 为扭振角度,φ·为扭振角速度。其中K(φ),C(φ,f)是多种函数的泛函问题,它们到底采取那种函数形式与具体迟滞系统有关,这些函数的确定可由以下步骤进行:首先求出各频率,各振幅下的迟滞回线的拟合曲线,得到式中对应的刚度,阻尼系数等随频率,振幅的变化规律,从而假设他们的函数关系表达式,再利用参数识别算法求出其中各参数。于是按照此思路以式(4-10)为基础,对每一迟滞回线进行参数辨识,可以得到刚度系数,粘性阻尼系数在每一工况下的值,求出各工况下的减振器刚度及阻尼的变化规律,分析其趋势后提出刚度、阻尼系数与频率、振幅的函数关系表达式为

式中p,q,β,a,b,c,d是待识别参数。在建立减振器恢复扭矩数学模型及参数辨识工作的过程中,对减振器试验结果进行深入研究分析后,提出了减振器恢复扭矩数学模型新的表达式

其中,Tc=C(φ,f)|n(φ,f)sgn(φ)为迟滞部分恢复扭矩,sgn)为符号函数,K(φ)表示系统的扭转刚度,控制基架线的形状;C(φ,f)控制纯滞后环的面积;n(φ,f)是阻尼成分因子函数:从减振器恢复扭矩数学模型及动态扭转曲线可以看到,n(φ,f)值越大,阻尼扭矩对角速度的变化越敏感,反之,阻尼扭矩对角速度的变化较迟钝。由此可知当n(φ,f)=0时,阻尼扭矩仅与速度符号有关,系统阻尼表示的是干摩擦阻尼;当n(φ,f)=1时,系统阻尼实际上简化为线性粘性阻尼;当n(φ,f)在(0,1)范围内变化时,表示干摩擦阻尼与线性粘性阻尼的混合阻尼模型;因此用n(φ,f)来表示系统内部阻尼成分函数。于是利用减振器动态扭振试验数据,根据已经建立的减振器恢复扭矩数学模型,进一步对扭振系统研究分析可得其阻尼成分因子函数为

式中h,g,μ,v,δ为待识别参数。按照一定估计准则,对减振器恢复扭矩数学模型中参数进行识别[20]如下


3 模型验证
为了验证参数识别及所建动力学模型的可靠性,通过减振器恢复扭矩动力学模型可以重构出不同频率和振幅下的恢复扭矩迟滞回线,于是选出部分由恢复扭矩数学模型重构绘制的扭矩-角度迟滞回线,与对应的试验迟滞回线相比较,如图5(a)、(b)、(c)、(d)所示,图中虚线为理论迟滞回线,实线为试验实测迟滞回线,由图中迟滞回线比较可知,理论迟滞回线和试验迟滞回线吻合较好,由此表明,提出的双线性混合阻尼恢复扭矩数学模型及其参数识别过程具有实用性和有效性。

图5 迟滞回线验证Fig.5 Hysteresis loops verification
4 结论
(1)由减振器动态扭振特性试验可知,恢复扭矩与扭振振幅成典型的迟滞非线性;并且其动刚度是振幅的非线性函数;阻尼是振幅、频率的非线性函数,阻尼成分较丰富,既有干摩擦阻尼,又有粘性阻尼;
(2)建立了减振器的扭振特性动力学模型,该模型能很好的描述此类减振器的动态扭振特性,通过动力学模型重构减振器迟滞回线,其理论迟滞回线和试验迟滞回线吻合较好,验证了模型及其参数识别过程的实用性和有效性;
(3)通过对减振器的动态工作特性进行试验和理论研究,掌握了减振器的扭振动力学变化特性,可以以此为基础合理优化减振器各设计参数,研发出性能优良的汽车减振器,为工程实际应用提供理论依据。
[1]丁 原,潘毓学.双质量飞轮式扭振减振器扭振模型分析[J].武汉理工大学学报,2009,31(8):133-6.
DING Yuan,PAN Yu-xue.Analysis of a dual-mass flywheel damper model on torsional oscillation[J].Journal of Wu Han University of Technology,2009,31(8):133-6.
[2] Reik W,Seebacher R,Kooy A.The Dual Mass Flywheel[P].6th LuK Symposium.1998.
[3]李 伟,史文库.双质量飞轮_DMF_的研究综述[J].噪声与振动控制,2008,10(5):1-5.
LI Wei,SHI Wen-ku.Summery of studies on dual mass flywheel(DMF)[J].Noise And Vibration Control,2008,10(5):1-5.
[4]张世义,胡建军,李光辉.汽车动力传动系统双质量飞轮式扭振减振器特性分析[J].现代制造工程,2007(9):120-124.
ZHANG Shi-yi,HU Jian-jun,LI Guang-hui.Analyzed of characteristic for dual mass flywheel type torsional vibration damper of vehicle powertrain system[J].Moder Manufacturing Engineering,2007(9):120-124.
[5]宋立权,赵孝峰,何泽海.引入摩擦的周向短弹簧汽车双质量飞轮分析模型及扭振固有特性[J].机械工程学报,2009,45(11)99-105.
SONG Li-quan,ZHAO Xiao-feng,HE Ze-hai.Analysis model and inherent characteristics of torsional vibration of the dual mass flywheel-circumferential short spring introduced friction[J].Journal of Mechanical Engineering,2009,45(11)99-105.
[6]唐一科,龚宪生,顾乾坤.聚氨酯泡沫塑料振动性能的试验研究[J].西南交通大学学报,2003,38(5):497-500.
TANG Yi-ke,GONG Xian-sheng,GU Qian-kun.Experimental investigation on vibration performance of polyurethane foam plastic[J].Journal of Southwest JiaoTong University,2003,38(5):497-500.
[7]辛士勇,朱石坚,曾 懿.金属橡胶隔振器隔振性能的试验研究[J].中国舰船研究,2008,3(6)13-16.
XIN Shi-yong,ZHU Shi-jian,ZENG Yi.Experimental study of the vibration reducing performance of metal rubber isolators[J].Chinese Journal of Ship Research,2008,3(6)13-16.
[8]江征风,陈 雷,吴 波.双质量飞轮动态试验方法研究[J].武汉理工大学学报,2008,30(10):117-119.
JIANG Zheng-feng,CHEN Lei,WU Bo.Research on method of dual mass fly-wheel dynamic experimentation[J].Journal of Wu Han University of Technology,2008,30(10):117-119.
[9] Den Hortog J F.Forced vibrations with combined coulomb and viscous friction[J].Transactions of the ASME,APM,1931(9):107-115.
[10] Iwan W D.The dynamics response of Bilin-Earhy steretic System [R]. California:Califo-mia Institute of T-echnology,1961.
[11]张强星,Sainsbury M G.干摩擦系统的简化[J].振动与冲击,1987,21(1):42-58.
ZHANG Qiang-xing,Sainsbury M G.The linearization of frictionally damped vibration system[J].Journal of Vibration and Shock,1987,21(1):42-58.
[12] Bouc R.Forced vibration of mechanical system with hysteresis[C].Proceedings of the Fourth Conference on Nonlinear Oscillations,Prague,Czech-oslovakia,1967.
[13] Wen Y K.Method for random vibration of hysteretic systems[J].Journal of Engineering Mechanics,ASCE,New York,1976,102(EM2):249-263.
[14] Wen Y K.Equivalent linearization for hysteretic system under random excitation[J].Transactions of the ASME,APM,1980,47(1):150-154.
[15] Badrakhan F.Dynamic analysis of yielding and hysteretic system by polynomial approximation[J].Journal of Sound and Vibration,1988,125(1):23-42.
[16]白鸿柏,张培林,郑 坚,等.滞迟振动系统及其工程应用[M].北京:科学出版社,2002,01.
[17]龚宪生,唐一科.一类迟滞非线性振动系统建模新方法[J].机械工程学报,1999,35(4):11-14.
GONG Xian-sheng,TANG Yi-ke.New method for modeling of a nonlinear vibration system with hysteresis characteristics[J].Journal of Mechanical Engineering,1999,35(4):11-14.
[18]赵荣国,徐友钜,陈忠富.一个新的非线性迟滞隔振系统动力学模型[J].机械工程学报,2004,40(2):185-188.
ZHAO Rong-guo,XU You-ju,CHEN Zhong-fu.New dynamic model for nonlinear hysteresis vibration isolation system[J].Journal of Mechanical Engineering,2004,40(2):185-188.
[19]李冬伟,白鸿柏,杨建春.非线性迟滞系统建模方法[J].机械工程学报,2005,41(10):205-209.
LI Dong-wei,BAI Hong-bai,YANG Jian-chun.Modeling of a nonlinear system with hysteresis characteritics[J].Journal of Mechanical Engineering,2005,41(10):205-209.
[20]林瑞霖,吴家明,黄次浩.钢丝绳弹性联轴器特性建模[J].海军工程大学学报,2003,15(2):26-30.
LIN Rui-lin,WU Jia-ming,HU Ci-hao.Modeling for the characteristics of flexible wire rope couplings[J].Journal of Naval University of Engineering,2003,15(2):26-30.
猜你喜欢
吉林电力(2022年1期)2022-11-10
电力自动化设备(2022年3期)2022-03-17
军民两用技术与产品(2021年1期)2021-07-28
煤矿安全(2021年2期)2021-03-04
铁道通信信号(2020年6期)2020-09-21
股市动态分析(2016年24期)2017-01-07
股市动态分析(2016年23期)2016-12-27
股市动态分析(2016年4期)2016-09-29
股市动态分析(2016年25期)2016-07-23
中国科技信息(2015年24期)2015-11-07
