爆胎汽车的轨迹跟踪与稳定性控制
2013-02-23 05:28王菲刘柏楠郭洪艳陈虹
电机与控制学报 2013年11期
王菲, 刘柏楠, 郭洪艳, 陈虹
(1.吉林大学汽车仿真与控制国家重点实验室,吉林长春 130022;2.吉林大学控制科学与工程系,吉林长春 130022)
0 引言
由于在高速公路上汽车的行驶速度较快,发生爆胎事故的概率也随之增大。爆胎的发生会严重影响汽车的行驶安全,这是因为爆胎后,汽车会向爆胎侧偏航,尤其在汽车高速行驶的情况下,由爆胎引起的汽车运动特性的变化会使没有经验的驾驶员出现错误的操作行为,例如对方向盘进行过度转向或急刹车等。在轮胎泄气后,轮胎与轮辋的结合会变得较松,因此过大的转向或急刹车很可能会导致轮胎脱圈,轮辋卡地,侧向力急剧增加,甚至发生翻车。因此在很多情况下,并非爆胎本身,而是驾驶员的操作不当导致事故发生。
为了减轻或消除这种危害,越来越多的国家开始制定相关的交通规定,例如安装胎压监测系统(tire-pressure monitoring system,TPMS)。所谓胎压监测,就是对轮胎气压、温度进行即时监测,并向驾驶员做出信息预警[1],但是由于它仅仅限于信息预警,是一种被动的预防技术,并不能对已经发生爆胎的汽车实行主动控制。因此,面对越来越多的爆胎事故,对汽车爆胎后的安全控制问题的研究成为了近几年的研究热点。文献[2]通过对两款SUV(sport utility vehicle)型汽车进行实车测试,发现汽车在发生轮胎胎面分离后,电子稳定性控制系统能够提高汽车的横摆稳定性,降低汽车发生冲撞的可能性。文献[3]通过分析爆胎后汽车偏航的主要原因,以及驾驶员采取不同的操作引起的整车运动性能的变化,同样验证了传统的汽车稳定性控制系统对于爆胎汽车的操作难度起到了减轻的作用。文献[4]通过分析爆胎后汽车运动特性所发生的变化,在传统汽车稳定性控制方法的基础上,提出了一种差动制动控制方法,但是该方法需要针对某种特定车型,给出前后轴等效侧偏刚度与汽车侧向加速度的关系,不仅提高了控制器的设计成本,也使得设计出的控制器不具有普遍适用性。文献[5-7]通过建立爆胎汽车动力学模型,分别采用模糊控制方法和基于微分平坦的模型预测控制方法以及最优控制方法对爆胎汽车进行主动转向控制,虽然主动转向控制方法具有一定的有效性,但是较大的前轮转向角容易使高速行驶的爆胎汽车失去稳定性甚至引发翻车等交通事故。
由于目前关于爆胎汽车的安全控制还没有相应的技术规范和法规要求,而且实车实验的危险性很高,因此,本文作为探索性学术研究,在国内外研究基础之上,提出了基于主动前轮转向和差动制动的爆胎汽车协调控制方法。该方法同时兼顾了差动制动与转向控制的优点,使汽车在爆胎后既能跟踪原始轨迹,又能保持其侧向稳定性,避免了由于转向过大而导致失稳或翻车等危险的发生,另外,采用该方法设计控制器时仅需要爆胎轮胎各项特性参数的名义值,减小了控制器的设计难度和成本。最后,通过veDYNA汽车动力学仿真系统验证了控制器的控制效果,仿真结果表明该方法能在实现爆胎汽车轨迹控制的同时,提高爆胎汽车的稳定性与安全性。
1 模型建立
根据低胎压轮胎特性试验可知[3],爆胎轮胎的侧偏刚度、侧倾刚度、纵滑刚度分别减小为正常轮胎的37.63%、40.34%和34.28%,轮胎的滚动阻力及其与路面的纵向附着系数分别增大为正常轮胎的10~30倍和1.082倍,轮胎的垂直刚度大约为正常轮胎的7.8%。上述爆胎轮胎特性的变化必然会导致汽车的运动状态发生改变,通常情况下,当汽车直线行驶时,爆胎轮胎滚动阻力的突然增大是导致汽车向爆胎侧偏航的一个主要原因[8],这是因为此时如若不施加任何操作,汽车四个车轮所受到的纵向力将无法平衡,从而产生一个横摆力矩Mf使汽车向爆胎侧偏航;而当汽车转向时发生爆胎,侧向力的变化是汽车运动状态改变的主要原因,前轮爆胎时汽车会出现不足转向特性,而后轮爆胎时汽车会出现过度转向特性[3]。由于爆胎轮胎的各项特性变化很难直接测量得到,而其对整车运动状态的影响又非常复杂,这导致很难建立精确的爆胎汽车动态模型,而执行机构饱和等约束条件的存在又使得采用较为简单的不基于模型的PID控制方法很难满足控制要求,因此本文选取模型预测控制方进行控制器设计,由于预测控制采用多步预测、滚动优化和反馈校正等控制策略,尤其适用于不易建立精确数学模型且存在约束条件的控制系统,为此首先需要建立用于控制器设计的爆胎汽车动态模型。
考虑到爆胎后如若不采取任何措施,汽车会向爆胎侧偏航行驶,导致汽车驶向其他车道或撞向路边,为了避免这种情况,需要对爆胎汽车进行转向控制,使汽车能够保持在原车道继续行驶直至停车,但是当高速行驶的汽车发生爆胎时,过大的转向角容易使汽车失稳,甚至导致翻车等交通事故的发生,为此还需要提高汽车的侧向稳定性。对于一般的通用型乘用车,其动态模型如图1所示。

图1 爆胎汽车动力学简化模型Fig.1 Simplified vehicle dynamics model after tire blow-out
在汽车上建立车身坐标系,其坐标原点位于汽车质心,汽车的x轴指向汽车的前进方向,y轴指向水平向左的方向,并与x轴垂直,z轴的正方向由右手螺旋定则确定,所有角度均取逆时针方向为正。为方便描述,前左、前右、后左、后右4个轮胎的编号用 i=1,2,3,4 表示,Fli,Fci,αi分别为纵向轮胎力、侧向轮胎力和轮胎侧偏角,ψ为横摆角,r为横摆角速度,δf为前轮转角,β为质心侧偏角,vx和vy为汽车纵向速度和侧向速度,v=(+)1/2为合速度,a,b,d1,d2分别为质心到前轴距离、质心到后轴距离、前轮轮距以及后轮轮距,M为车身质量,Iz为绕z轴的转动惯量,ΔMb为差动制动控制作用下产生的附加横摆力矩。为得到爆胎汽车的动力学描述,作如下假设[9]:
1)忽略转向系统的影响,直接以前轮转角作为输入;
2)忽略悬架的作用,认为汽车只做平行于地面的平面运动,即汽车沿z轴的位移,绕y轴的俯仰角与绕x轴的侧倾角均为零;
3)忽略轮胎回正力矩的作用;
4)忽略空气阻力的作用。
在上述假设下,汽车可以看做一个运动的刚体,根据刚体动力学基本理论[10],爆胎汽车绕z轴的横摆运动和沿y轴的侧向运动方程可以写为

另外,通过如下的坐标转换公式可得到汽车在惯性坐标系下的侧向位移为

根据上文的分析可知,若前轮发生爆胎,由滚动阻力Ffi引起的绕质心转动的附加横摆力矩为

若后轮发生爆胎,则有

其中,轮胎的滚动阻力与轮胎的垂直载荷Fzi成正比,比例系数为轮胎的滚动阻力系数Kfi,

车轮的垂直载荷由于受纵向加速度、侧向加速度、侧倾以及俯仰等的影响,其负载的转移包括静态转移、俯仰转移以及侧倾转移3部分,而汽车的侧倾运动对垂直载荷的影响较小,可以将其忽略,汽车的垂直加速度根据前面的假设可以认为是零,由此轮胎的垂直载荷可描述为
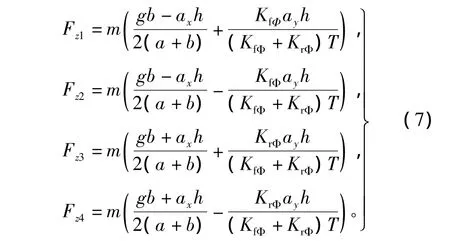
其中:KfΦ,KrΦ为汽车前、后轴的侧倾角刚度名义值;h为汽车质心到地面的距离;T为平均轮距,即
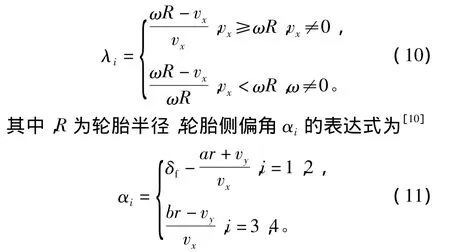
其中:λi为车轮的纵向滑移率;αi为轮胎侧偏角;μHi为轮胎-地面附着系数。假设车轮的轮速ωi和纵向车速为可测量,则纵向滑移率可表示为[11]由于侧向轮胎力与轮胎垂直载荷,车轮的纵向滑移率,轮胎侧偏角以及轮胎-地面附着系数的关系比较复杂很难用一个数学公式进行建模,因此本文采用数据图表的形式进行描述[12]。
本文假设汽车的轮速,纵向速度和纵向加速度为可测变量,而侧向加速度由

进行计算,则综上所述,爆胎汽车动态模型的状态空间方程可简写为

其中:状态变量为x=[vy,β,r,ψ,Y]T;测量输出为y=[β,r,Y,ay]T;控制输入为 u=[δf,ΔMb]。
2 控制系统设计
根据上文的分析可知,当汽车爆胎后,会由于爆胎车轮滚动阻力的突然增加等原因而产生一个使汽车偏航的横摆力矩Mf,为了平衡这一横摆力矩,本文首先设计基于状态(质心侧偏角和横摆角速度)反馈的差动制动内环控制器(制动压力为Pbi)作用于车轮,使汽车产生一个反向的附加横摆力矩ΔMb用以尽量抵消Mf的影响,并提高爆胎汽车的侧向稳定性。而外环控制器主要用于实现爆胎汽车的轨迹跟踪任务,因此以前轮转角作为外环控制输入,保证汽车爆胎后仍能继续行驶在原车道,上述控制系统原理图如图2所示。
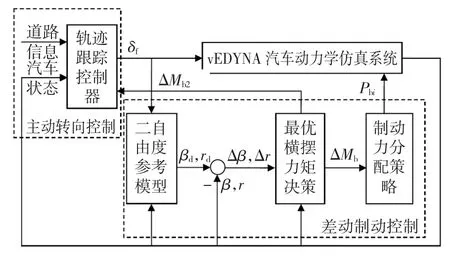
图2 控制系统原理图Fig.2 Control system schematic diagram
2.1 差动制动内环控制器设计
为保证爆胎汽车的稳定性,前轮可转向的范围及其变化幅度受到很大限制,这使得不能对爆胎汽车的轨迹控制达到期望的控制效果,但是如果减弱对于前轮转角的约束,又会造成爆胎汽车的稳定性变差,因此不能仅仅依靠主动转向来控制爆胎汽车的行驶轨迹。由于传统的稳定性控制系统对车辆的操纵稳定性能够起到积极的辅助作用,而在此基础之上设计的爆胎汽车稳定性控制系统能够降低驾驶员对于汽车爆胎后的反应操作难度[2-4],因此本小节在此基础之上研究提高爆胎汽车稳定性的内环控制方法。
根据上文的分析可知,Mf主要是由爆胎轮滚动阻力的突然增大引起的,因此可以通过式(4)~式(8)求取所需的附加横摆力矩,

但由于仅采用上式作为差动制动控制量时为开环控制,且仅考虑了滚动阻力的影响,而滚动阻力系数选取的是名义值,因此无法获得较好的控制效果,所以本文在此基础之上加入基于状态反馈的闭环控制,以二自由度汽车参考模型的运动状态作为理想运动状态[13],通过外环给定的前轮转角可以得到横摆加速度和质心侧偏角的期望值βd,rd有

其中,Cyf,Cyr为爆胎前汽车的等效侧偏刚度。
当汽车爆胎后,实际运动状态(β,r)和理想运动状态(βd,rd)会产生偏差,为了消除这一偏差,通过差动制动方式施加附加横摆力矩ΔMb2=ΔMb-ΔMb1使车辆恢复到理想的运动状态,则由式(14)可知

因此方程(1)中的Mf项被抵消掉,只剩下Mb2这一项。为了便于控制器的设计,在内环部分暂不考虑爆胎后轮胎侧偏刚度的变化,且认为轮胎工作在线性区,则通过对式(1)中的第二个和第三个公式在原点处进行线性化可得到

虽然这可能会导致模型误差变大,但由于外环控制作用,在下文的仿真实验中会验证该控制器的控制效果仍能满足要求,用式(16)减去式(15)后得到误差系统的状态方程为
其中,Δβ=β-βd,Δr=r-rd,这样转化后,就将原来的跟踪问题转变为原点的镇定问题,因此只需要设计一个状态反馈控制律,即
使得Ar-BK为赫尔维茨矩阵,即可使原点是渐进稳定的[14],从而使实际的β和r跟踪上期望的βd和rd。需要说明的是,差动制动的控制作用会使汽车的纵向速度发生变化,但是考虑到纵向速度不能为零,因此本文所设计的控制器只作用在vx>4 m/s的时候,当vx≤4 m/s时车速已经处于很低的情况,此时车内的驾驶员可以自行操纵汽车直至停车,另外,纵向速度的变化会导致Ar发生变化,为了保证获得较好的控制效果可以通过极点配置等方法实时计算状态反馈控制律。综合式(14)和式(18)得到最终的 ΔMb,即

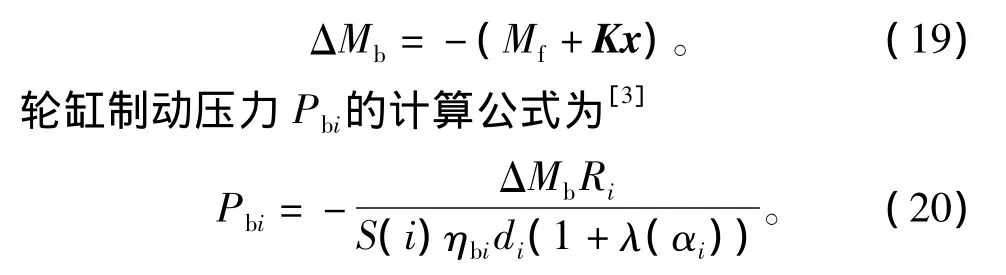
具体的计算方法及符号含义可参考文献[3]。为了避免过大的制动力对爆胎车轮造成的不利影响,本文采取对除爆胎车轮之外的其他3个车轮进行同时制动的制动策略,相比于文献[3],采用3个车轮进行制动可以减小分配到每个车轮上的制动力,降低其对侧向力的影响,同时更加安全稳定,所以本文所采取的这种简单而有效的制动策略更适合于爆胎这种紧急情况。
2.2 前轮转向外环控制器设计
在设计外环控制器时,需要将内环控制器和被控对象作为一个整体考虑,由于内环的控制作用,Mf已经由ΔMb1抵消掉,因此式(1)中的第三个公式应改为

其中ΔMb2这一项通过内环控制器已经计算出,在设计外环控制系统时将其作为已知量,则系统的输入量只剩下δf,而离散化后相应的状态方程变为

由于外环控制的主要作用是使汽车在安全稳定的前提下,尽量保持在原车道继续行驶,因此为了保证汽车能够稳定行驶,前轮的主动转向角不能过大,为了尽量避免轮胎力达到附着极限,对汽车的侧向加速度也要进行一定的限制,另外,前轮转角只要将能被限制在一定范围内,即可满足稳定性要求,为了能更好地跟踪期望路径,并未将前轮转角放在目标函数中而是作为时域硬约束进行控制问题求解。在一般情况下,行驶中的汽车无法预知整条道路的信息,但是可以借助传感器等测量估计手段感知行车环境信息及自身的位置信息[15],因此本文假设汽车前方一定范围内的道路中心线上的点的位置坐标(Xd,Yd)已知,由于跟踪的期望路径为直线,目标函数可以选为爆胎汽车与期望路径之间的侧向偏差,将式(22)作为预测方程,爆胎汽车轨迹跟踪的MPC问题可描述为
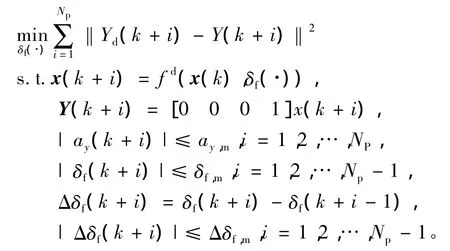
其中,Np为预测时域,通过求解上述优化问题,可以得到前轮转角的控制序列δf(·),由于扰动以及模型误差的存在,直接将整个控制序列作用于系统无法获得较好的控制效果,因此,本文选取控制序列中的第一项作为外环控制量对汽车进行转向控制。
3 仿真实验
在下文的仿真验证中,将采用德国TESIS公司的高精度汽车动力学系统veDYNA验证控制器的控制效果,该系统能够模拟爆胎后实际汽车的运动特性以及环境影响,包括:
1)非线性侧滑现象,非线性轴荷转移;2)垂直,侧倾以及俯仰动态;3)纵向,侧向以及横摆耦合动态;4)爆胎后轮胎各项特性的动态变化;5)轮胎具有一定的外倾角及内束角;6)风阻对高速行驶的汽车产生的影响。
该系统中包括多款车型,本次实验所选取的是一款后轮驱动,前轮转向的乘用型轿车,每个车轮的制动力可通过制动力分配单独控制。当爆胎发生后,控制器将对爆胎汽车的转向和制动进行控制,为了比较本文所设计的协调控制器的控制效果,下面分别仅采用转向控制器控制和转向-差动制动协调控制的控制效果进行了仿真实验,测试工况设置为:汽车行驶在路面质量良好的高速公路上,轮胎-路面摩擦系数为0.9,汽车行驶10 s时发生爆胎,爆胎前一时刻的车速为100 km/h。MPC控制器的参数设置为 ay,m=3.136 m/s2,δf,m=1.6°,Δδf,m=0.4°。由于爆胎前汽车沿直线行驶,因此驾驶员的方向盘转向输入设置为零,如果考虑驾驶员在爆胎后进行的转向操作输入,只需在外环控制器优化出的第一个控制量δf(k+1)中减去驾驶员的转向输入部分即可作为前轮转角控制量控制汽车的转向运动。
本文假设爆胎后,驾驶员保持爆胎之前的驾驶动作不变,图3~图16为汽车左前轮爆胎的仿真曲线,其中点画线(-.)表示无控制器作用下的仿真结果,虚线(--)表示主动转向-差动制动协调控制器作用下的仿真结果,实线(-)表示仅转向控制器作用下的仿真结果。
图3~图5分别为汽车的侧向位移、附加横摆力矩控制输入和前轮转角控制输入仿真曲线。

图3 侧向位移Fig.3 Lateral displacement

图4 附加横摆力矩Fig.4 Additional yaw moment

图5 前轮转角Fig.5 Front wheel steering angle
从图中可以看出,在无控制器作用时,汽车会向爆胎侧偏航,而采用主动转向-差动制动协调控制器时的汽车侧向位移不到0.08 m,降低到仅采用转向控制时的24%左右,而前轮转角控制输入的最大值为0.5°左右(图中为负值表示向右转向),是仅采用转向控制时的1/3,这说明协调控制器能够用较小的前轮转角实现更好的轨迹跟踪控制效果,由于前轮转角的大幅减小,极大地降低了轮胎脱圈的可能,避免由于前轮转角过大,导致高速行驶的爆胎汽车发生翻车等危险事故,而汽车的侧向偏移降低到0.08 m以内,也基本上消除了与车道上其他汽车发生碰撞的可能性。图6~图12分别为车身坐标系下的纵向车速、侧向车速、惯性坐标系下的侧向车速、侧向加速度、质心侧偏角、横摆角速度以及横摆角仿真曲线。可以看出无控制器作用时的爆胎汽车已明显失稳,而采用主动转向-差动制动协调控制器时,制动控制作用会使汽车的纵向速度逐渐下降,汽车的侧向速度、侧向加速度、质心侧偏角、横摆角速度以及横摆角均比仅采用转向控制时明显减小很多,这说明本文所提出的主动转向-差动制动协调控制方法能够起到提高爆胎汽车稳定性的作用。


图8 惯性坐标系下的侧向车速Fig.8 Lateral velocity in inertia coordinate system

图9 侧向加速度Fig.9 Lateral acceleration

图10 质心侧偏角Fig.10 Sideslip angle

图11 横摆角速度Fig.11 Yaw rate

图12 横摆角Fig.12 Yaw angle
图13~图16为汽车4个轮胎的轮胎侧偏角仿真曲线,可以看到,协调控制器作用下的轮胎侧偏角比仅采用转向控制器时的轮胎侧偏角更接近未爆胎时的值,且爆胎后4个轮胎的侧偏角均较小(1.1°以内),这说明轮胎并未与轮辋分离,避免了轮辋卡地这种情况的发生。

图13 左前轮轮胎侧偏角Fig.13 Left front tire slip angle
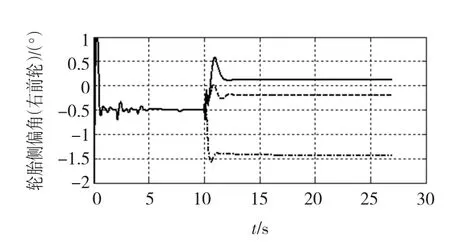
图14 右前轮轮胎侧偏角Fig.14 Right front tire slip angle

图15 左后轮轮胎侧偏角Fig.15 Left rear tire slip angle
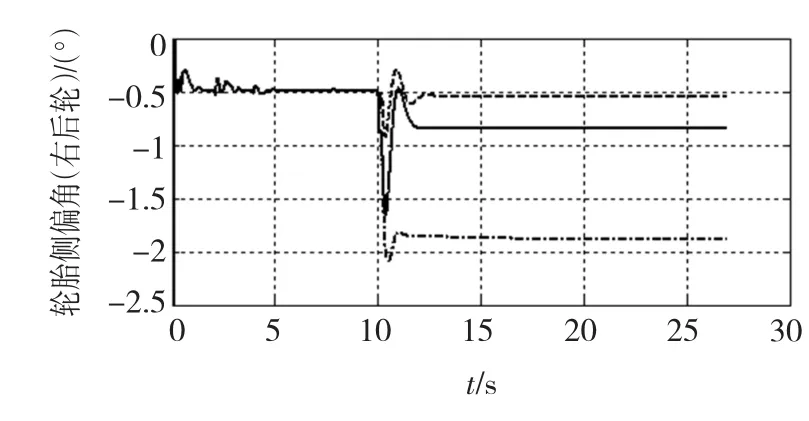
图16 右后轮轮胎侧偏角Fig.16 Right rear tire slip angle
4 结语
本文首先根据所要解决的控制问题建立了用于控制器设计的名义模型,并使用该模型首先设计后轮差动制动内环控制器,缓和爆胎后汽车的侧偏现象,提高汽车的横摆稳定性,但考虑到汽车爆胎后各项特性参数并非常值,而且有建模误差的存在,这使得所设计的差动制动控制器很难准确补偿由爆胎引起的附加横摆力矩,也无法控制住汽车爆胎后的行驶轨迹,因此本文加入前轮转向外环控制器,该外环控制器的控制量除了作为内环控制的输入量以外,同样作用于系统,实现转向-差动制动协调控制。通过仿真实验,验证了本文所提出的转向-差动制动协调控制方法比单独的转向控制更加安全可靠。这种协调控制方法不仅能控制爆胎汽车的行驶轨迹,使汽车保持在原车道继续行驶,还能减小转向所需的前轮转角,使汽车在较小的前轮转角控制作用下沿原车道继续行驶直至停车,避免汽车在爆胎后由于车速较高且前轮转角过大而导致失稳或轮辋卡地所引发的交通事故,保证了人车安全。
[1] WEI Changzheng,ZHOU Wei,WANG Quan,et al.TPMS(tirepressure monitoring system)sensor:monolithic integration of surface-micromachined piezoresistive pressure sensor and self-testable accelerometer[J].Microelectronic Engineering,2012,91:167-173.
[2] ARNDT S M,ARNDT M W,ROSENFIELD M.Effectiveness of electronic stability control on maintaining yaw stability when an SUV has a rear tire tread separation[J].SAE International Journal of Passenger Cars-Electronic and Electrical Systems.2009,2(1):120-140.
[3] 郭孔辉,黄江,宋晓琳.爆胎汽车整车运动分析及控制[J].汽车工程,2007,29(12):1041-1045,1109.
GUO Konghu,HUANG Jiang,SONG Xiaolin.Analysis and control of vehicle movement with blown-out tire[J].Automotive Engineering,2007,29(12):1041-1045,1109.
[4] 黄江,郭孔辉,宋晓琳,等.爆胎汽车的稳定性控制[J].中国机械工程,2009,20(16):2006-2010.
HUANG Jang,GUO Konghui,SONG Xiaolin,et al.Vehicle stability control method after tire blow-out[J].China Mechanical Engineering,2009,20(16):2006-2010.
[5] 张彦会,李晓萍,伍松.基于主动转向的爆胎汽车操纵稳定性模糊控制研究[J].机械设计与制造,2012,3:182-184.
ZHANG Yanhui,LI Xiaoping,WU Song.On active steering of tire-burst vehicle handling and stability fuzzy control research[J].Machinery Design and Manufacture,2012,3:182-184.
[6] GUO Hongyan,WANG Fei,CHEN Hong,et al.Stability control of vehicle with tire blowout using differential flat-ness based MPC method[C]//Proceedings of the 10th World Congress on Intelligent Control and Automation.July 6 -8,2012,Beijing,China.2012:2066-2071.
[7] PATWARDHAN S,TAN H S,TOMIZUKA M.Experimental results of a tire-burst controller for AHS[J].Control Engineering Practice,1997,5(11):1615-1622.
[8] WILLIAM B,TERRY D D,WESLEY D G.3-dimensional simulation of vehicle response to tire blow-out[C]//SAE Technical Paper,International Congress and Exposition,February 23 - 26,1998,Detroit,Michigan.1998:1 -15.
[9] IMSLAND L,JOHANSEN T A,FOSSEN T I,et al.Vehicle velocity estimation using nonlinear observers[J]. Automatica,2006,42(12):2091-2103.
[10] KIENCHE U,NIELSEN L.Automative control system[M].Berlin:Springer,2000:301 -349.
[11] FALCONE P,BORRELLI F,ASGARI J,et al.Predictive active steering control for autonomous vehicle systems[J].IEEE Transactions on Control Systems Technology,2007,15(3):566-580.
[12] 郭洪艳,陈虹,张华玉.车辆动力学数据机理建模及车速估计应用[C]//中国控制会议,7,22-24,2011,烟台,中国.2011:5304-5309.
GUO Hongyan,CHEN Hong,ZHANG Huayu.Date/physics modelling of vehicle dynamics and application to velocity estimation[C]//Proceedings of Chinese Control Conference,July 22 -24,2011,Yantai,China,2011:5304 -5309.
[13] 张金柱,张洪田,孙远涛.电动汽车稳定性的横摆力矩控制[J].电机与控制学报,2012,16(6):75-80.
ZHANG Jinzhu,ZHANG Hongtian,SUN Yuantao.The direct yaw control of electric vehicle stability control[J].Electric Machines and Control,2012,16(6):75 -80.
[14] HASSAN K K.Nonlinear systems[M].New Jersey:Pren-tice Hall,2002:111 -161.
[15] 胡平,郭景华,李琳辉,等.智能车辆纵横向反演变结构协调控制[J].电机与控制学报,2011,15(10):89-94.
HU Ping,GUO Jinghua,LI Linhui,et al.Study on coordinated longitudinal and lateral control of intel-ligent vehicles using backstepping variable control[J].Electric Machines and Control,2011,15(10):89-94.
(编辑:刘琳琳)
猜你喜欢
民用飞机设计与研究(2020年4期)2021-01-21
新课程·中学(2019年7期)2019-09-17
小学生学习指导·爆笑校园(2019年6期)2019-09-10
物理教学探讨(2018年1期)2018-02-13
下一代英才(酷炫少年)(2017年3期)2017-06-15
财经国家周刊(2017年1期)2017-01-23
公民与法治(2016年20期)2016-05-17
红蜻蜓·低年级(2015年11期)2016-02-02
中国自行车·骑行风尚(2014年4期)2014-10-10
铁道建筑(2010年11期)2010-07-30