
采用八方向Gabor滤波的指纹识别算法
2013-03-03 05:26毛元冯桂汤继生
华侨大学学报(自然科学版) 2013年2期
毛元,冯桂,汤继生
(华侨大学 信息科学与工程学院,福建 厦门361021)
随着身份鉴别技术在社会各个领域的广泛应用,生物特征识别技术成为近年来研究的热点.指纹特征因具备普遍性、长久性、唯一性和易采集性的特点,同时可以实现一对一比对和一对多的比对模式,使得指纹识别成为解决现代身份认证问题的有效方法之一.指纹中心点的计算精度和有效的提取指纹特征是影响指纹识别系统正确率的关键因素.目前,基于特征点的匹配算法[1-2]已被大部分自动指纹识别系统所采用,主要思想为根据指纹脊线端点和交叉点的坐标及方向信息进行匹配.此算法在一定程度上取得了较好的识别效果,但低质量指纹图像因细节点较难有效提取,其识别效果往往不佳.为解决平移不变问题和提高指纹识别性能,本文将指纹增强算法和复滤波器中心点定位结合使用,提出一种基于八方向Gabor滤波的指纹识别算法.
1 指纹识别算法原理
采用基于结构的特征提取算法不仅可以提取指纹局部脊线特征,而且考虑到全局纹理特征[3].算法主要有3个步骤:1)指纹图像增强;2)指纹中心点定位;3)确定感兴趣区域(region of interest,ROI)和特征提取.把围绕中心点作的同心环作为ROI并进行分扇区归一化,将八方向Gabor滤波器组与归一化后的ROI相卷积;最后将待匹配指纹的特征与指纹模板库进行最小距离匹配.图1为算法流程图.

图1 指纹识别算法流程图Fig.1 Algorithm flow chart for fingerprint identification
1.1 指纹图像增强
由于指纹在采集过程中可能会带来各种噪声,产生的一些低质量指纹图像,影响到指纹中心点的定位和识别系统的准确率.因此,需要先对指纹图像进行增强以获取更好的指纹脊线结构.采用Hong等提出的基于Gabor滤波的指纹图像增强算法[4-5]进行图像增强 .图2为指纹图像增强算法框图,该算法主要包括如下3个步骤.
1)方向场估算 .将图像划分为w×w的小块,并在每一小块中计算像素(i,j)处的梯度值∂x(i,j)和∂y(i,j),最后计算出以像素(i,j)为中心的方向θ(i,j).即

由于采集环境和手指本身状态等原因造成指纹图像含有噪声,所求方向场中因存在着方向突变块并不准确,故需用高斯低通滤波器进行平滑.
2)频率场估算 .根据指纹纹线在垂直于纹线的方向上灰度大致成正弦波的规律,可以计算出相邻峰值之间的平均像素数T(i,j),则纹线频率F(i,j)=1/T(i,j).
3)Gabor滤波 .以方向场和频率场为参数构造Gabor滤波函数,适当调整滤波器参数,则可以减弱脊线噪声,增强指纹图像.

图2 基于Gabor滤波的增强过程Fig.2 Process for image enhancement based on Gabor filters
1.2 指纹中心点定位
指纹中心点定义为指纹脊线曲率最大的点,其定位精度很大程度上影响匹配的正确率.定位指纹中心点是解决指纹平移问题的常用方法,而旋转不变问题可以通过循环旋转指纹码的特征值得到较好的解决[6].定位指纹中心点可以在方向图中进行,而Poincare索引数值法[7]是广泛应用的方法之一,但该方法的缺陷在于方向场较难提取或估计精度往往不够时,导致定位效果不理想.Nilsson等[8]提出利用指纹中心点的对称性对复滤波器的强响应,从而定位中心点的方法.该算法把指纹图像的块方向和脊线细节特征有机结合起来,相比仅依赖局部脊线结构的定位方法能有效地抵抗图像噪声,从而更好地定位中心点.文中采用该算法确定指纹中心点位置,有如下3个基本步骤.
1)计算原始指纹图像I(x,y)的复方向场,即有

式(4)中:fx和fy分别表示原始指纹图像在x方向和y方向的梯度.
2)由于仅对检测中心点感兴趣,故只需使用抛物对称形式的滤波器,即

3)将复方向场图像与中心点相匹配的滤波器进行卷积并取模,即

式(6)中:中心点是R(x,y)最大时所对应的像素点.
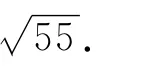
该算法较好地解决了低质量指纹图像中心点问题.3种不同低质量类型指纹增强后中心点定位效果,如图3所示.
1.3 感兴趣区域的确定和特征提取
当指纹中心点检测出后,中心点周围的区域被定义为指纹感兴趣区域(ROI).ROI经八方向Gabor滤波便可提取出指纹的全局和局部特征.具体算法有如下7个主要步骤.
1)确定指纹中心点位置,并围绕中心点裁剪指纹感兴趣区域(ROI).
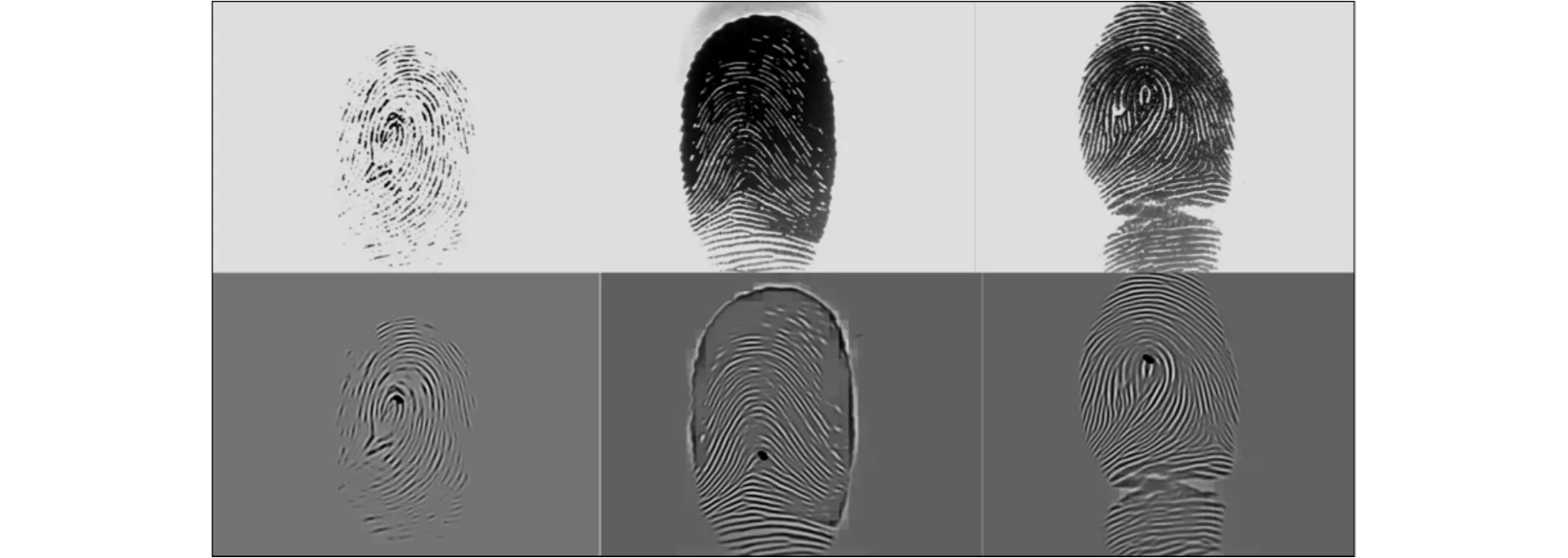
图3 3种不同低质量类型指纹图像中心点定位Fig.3 Reference point location on three different poor quality fingerprints
2)以中心点为中心作同心圆,分割ROI成B个环形区域,最后将每个环形区域分割成K个扇形区域.对于分辨率为500 dpi的指纹图像,取环形区域的宽度为20个像素宽,B=5,K=16.
3)为消除指纹噪声的影响,分扇区归一化指纹图像.
4)归一化后的ROI与八方向Gabor滤波器组分别进行卷积.
5)图像经滤波后,计算每个扇区Si内的平均绝对误差(average absolute deviation,AAD)特征值,其计算式为

式(7)中:Fi,θ(x,y)为扇形区域Si内的各个像素的灰度值;Pi,θ表示区域Si内像素灰度的均值;ni表示环形区域Si内的数目;i∈{0,1,2,…,79};θ∈{0°,22.5°,45°,67.5°,90°,112.5°,135°,157.5°};Vi,θ被称为平均绝对误差(AAD)特征值.其中,每一方向的滤波图像可由个数为5×16=80的特征向量来表示,故每幅指纹图像经8方向滤波后提取AAD特征个数为8×80=640,AAD特征向量表示的指纹特征被称为Finger Code.
6)设Finger Code 1从指纹原图像中提取获得,Finger Code 2通过将原图像旋转11.25°以后提取获得.将Finger Code 1和Finger Code 2分别旋转R×22.25°(R=0,…,15),来实现旋转不变性,旋转特征向量与将指纹图像先旋转再提取特征向量等价.对于偏转集中在±45°的指纹库,可以只将两个特征向量分别旋转0°,22.5°,45°,315°,337.5°;对于每个指纹,对应10个指纹模板保存在指纹模板库中.
7)计算输入指纹的AAD特征值与指纹模板库中每个指纹模板的欧式距离,并采用最小距离法进行匹配.
2 实验结果与分析
在CPU为3.40 GHz,3.39 GHz,内存为2.00 GB的PC和 Matlab R2006A的开发环境下,选用FVC2004DB1的指纹数据库(http:∥bias.csr.unibo.it/fvc2004)作为实验对象.该指纹库图像来自100个不同的手指,每个手指分别采集8次,共800幅,图像尺寸为480 px×640 px,分辨率为500 dpi.
1)选取DB1中5_3.tif为实验对象,其指纹中心点定位,ROI确定和归一化图像,如图4所示.

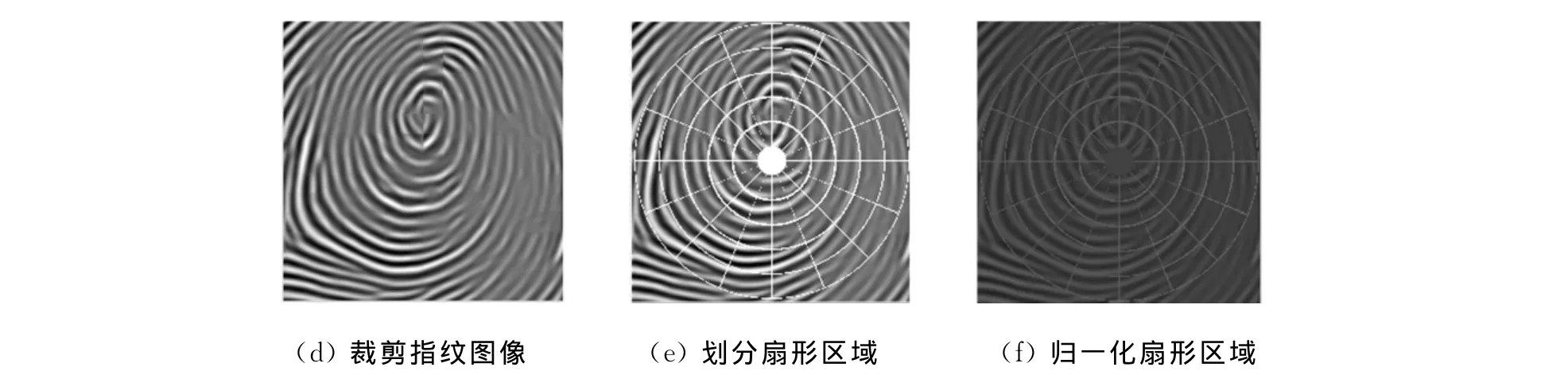
图4 确定特征提取区和图像归一化Fig.4 Area of interest and normalized image
2)八方向Gabor滤波及特征提取 .指纹图像与Gabor滤波器组卷积后,每一方向滤波后图像中各个扇区的AAD反映了指纹的局部特征,而扇区的有序排列则表征了指纹的全局特征.与滤波结果相对应的AAD特征,如图5所示.

图5 与八方向滤波结果相对应的AAD特征Fig.5 AAD feature corresponding to eight directions filtering results

实验中采用的每个手指是从8幅中选取5幅作为模板指纹,3幅作为输入指纹.FVC2004DB1的指纹数据库中指纹图像偏转集中在±45°,通过将原始指纹和旋转11.25°的指纹图像进行八方向Gabor滤波,提取到两个FingerCode特征 .分别将其旋转0°,22.5°,45°,315°,337.5°,与待验证指纹进行5×2=10次匹配,近似实现旋转不变性.
表1列出了单Finger Code[9]和本文算法(双Finger Code)两种匹配方法的识别率 .由表1可见:基于双Finger Code匹配算法(本文算法)比基于单Finger Code算法的更有效.
点模式匹配算法[10-11]和本文算法的实验结果对比,如表2所示.由表2可见:采用本文算法的识别率为92.67%,较点模式匹配算法识别率有所提高.

表1 单Finger Code和双Finger Code的识别率Tab.1 Recognition rate of single finger code and double finger code
3 结论
将指纹增强算法和复滤波器中心点定位结合使用,对指纹尤其低质量指纹图像取得良好的定位效果,较好的解决了平移不变问题.同时,循环移动双Finger Code特征值近似实现旋转不变性,算法取得了较好的识别效果.八方向Gabor滤波器组同时提取指纹的全局和局部特征,该算法优于基于单Finger Code特征和基于点模式的指纹识别算法.

表2 两种模式指纹匹配算法实验结果Tab.2 Experimental results of the different fingerprint identification algorithm
[1] RANADE S,ROSENFELD A.Point pattern matching using minutiae and by relaxation[J].Pattern Recognition,1980,12(5):269-275.
[2] JAIN A K,PRABHAKAR S,CHEN Shao-yun.Combining multiple matchers for a high security fingerprint verification system[J].Pattern Recognition Letters,1999,20(11/12/13):1371-1379.
[3] 回红.基于结构的指纹表达及匹配算法研究[D].杭州:浙江大学,2002:42-45.
[4] HONG Lin,WANG Yi-fei,JAIN A.Fingerprint image enhancement:Algorithm and performance evaluation[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,1998,20(8):777-789.
[5] 太艳荣.基于 MATLAB实现的指纹图像预处理[J].西南民族大学学报:自然科学版,2008,34(4):837-838.
[6] 贺颖,蒲晓蓉.应用 Gabor滤波的指纹识别算法的研究与实现[J].计算机工程与应用,2010,46(12):172-175.
[7] 田捷,杨鑫.生物特征识别理论与应用[M].北京:电子工业出版社,2005:213-218.
[8] NILSSON K,BIGUN J.Localization of corresponding points in fingerprints by complex filtering[J].Pattern Recognition Letters,2003,24(13):2135-2144.
[9] JAIN A K,PRABHAKAR S,HONG Lin.Finger code:A filterbank for fingerprint representation and matching[C]∥Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition.Colorado:IEEE Press,1999:187-193.
[10] 张志禹,佀薇.一种基于混合匹配的指纹识别方法[J].微型机与应用,2011,30(2):42-44.
[11] 罗希平,田捷.自动指纹识别中的图像增强和细节匹配算法[J].软件学报,2002,13(5):946-956.
猜你喜欢
计算机技术与发展(2020年8期)2020-08-12
电脑报(2020年12期)2020-06-30
电脑报(2019年4期)2019-09-10
长春理工大学学报(自然科学版)(2018年5期)2018-10-31
电子制作(2018年11期)2018-08-04
信息安全研究(2016年4期)2016-12-01
中成药(2016年8期)2016-05-17
现代工业经济和信息化(2016年8期)2016-05-17
中国科技信息(2015年6期)2015-11-10
大众摄影(2015年9期)2015-09-06
