
几种自适应线性判别分析方法在肌电假肢控制中的应用研究
2013-04-29 07:08赵曜楠张浩诗徐礼胜李光林
集成技术 2013年4期
赵曜楠 张浩诗 徐礼胜 李光林
1(中国科学院深圳先进技术研究院生物医学与健康工程研究所 深圳 518055)
2(东北大学中荷生物医学与信息工程学院 沈阳 110004)
1 引 言
我国拥有数量众多的肢体残疾人口,肢体残疾人的生活质量问题一直是社会关注的热点问题[1,2]。
假肢是为弥补截肢者已失肢体和代偿部分功能而制造装配的人工肢体。传统假肢由于控制方法不实用,表现出功能单一、速度缓慢、动作不灵巧、不便于维护等问题。
随着先进的信号处理技术及高性能微处理器的出现,通过模式识别的方法对体表肌电信号进行解码、进而实现多功能假肢控制的思路已经成为了现代假肢控制的主要方法[3,4]。
适合用于表面肌电信号的模式分类的方法,总体上可归为基于统计的分类方法、模糊分类、模式聚类分类法、神经网络分类法等。线性判别分析(Linear Discriminant Analysis,LDA)方法由于具有实现简单、训练迅速、准确率较高等优点,在基于肌电模式识别的假肢控制系统中被广泛应用。
但是,大部分实际运用都存在一个突出问题,那就是模式分类器经过初次训练后就固定不变了,或者需要使用相当长一段时间才重新训练一次。在训练分类器时,样本的数量和代表性总是不够的。而且,肌电控制中的“训练”和“使用”是两个相互独立的过程。独立的训练数据所提供的信息能够保证肌电模式分类算法在整个肌电控制时间段内具有稳定识别效果的条件是:肌电信号的特性随时间推移能保持不变。当训练条件和测试条件存在某些偏差时,由训练数据估计得到的分类器模型将不能很好地预测该时刻的测试样本,可以预见肌电模式识别的效果将会变差。更糟糕的是,外部或人体内部环境会随时变化,使得肌电特征分布会具有时变特性[5,6]。
国内外有许多利用自适应方法解决时变信号模式分类的研究[7],而实现有效的在线非监督式学习一直是模式识别领域内的难点。对时变的肌电信号来说,由于其缺乏严格的理论模型,要实现这一点显得尤为困难[8]。
本文尝试在传统 LDA 模式分类器的基础上增加三种不同的自适应反馈机制,使分类器在尽量保持原有稳定性的基础上能够不断适应新的样本,具有更强的适应性。这三种自适应机制分别对应自增强线性判别分析分类器、循环训练集线性判别分类器和卡尔曼自适应线性判别分类器。本文比较了三种方法对多种肌电模式识别率的改善情况,并探讨了各个方法的优缺点。
2 算法原理
2.1 LDA 分类器
线性判别分析方法是以最小错误概率的贝叶斯决策规则为理论依据的模式识别算法[9]。
在 LDA 方法中,设第 k 种运动类型表示为 ck,x为每段肌电信号中计算的特征参数组成的特征向量。对于每一个信号,我们利用其特征向量 x 来判断其所属运动类型 ck。
依据贝叶斯公式,由特征向量 x 所判别的动作类型 ck可表示为[10]:

其中,p(ck|x)为特征向量 x 所对应的数据为第 k 类动作的后验概率,也就是希望得到的分类标准。对于一次动作,某一类的后验概率相较其他类最大,表明该类为 LDA 方法所得的最优决策。
p(ck)为第 k 类动作出现的先验概率,如果训练集中,每种动作是均匀分布的,各类的概率 p(ck)相同且为 1/N。p(x)为特征向量 x 的概率。p(x|ck)为该特征向量所对应的数据为第 k 类动作的条件概率,可以被看做类条件概率密度函数,即对于已知类型 k,样本 x 的概率密度分布。
对于同一类型 ck,p(ck)和 p(x)的值均相同,故对于后验概率 p(ck|x)的估计问题可转化为对类条件概率密度函数 p(x|ck)的估计。
由于多元高斯分布有很好的性质,假设类条件概率密度函数 p(x|ck)满足多元高斯分布,故有:

其中,f 是训练集的维数,即训练集内特征向量的个数,μk是类型 k 的均值向量,C 是各个类型的协方差矩阵,协方差矩阵决定了分布的离散程度,C 越大,数据分布越分散。而在动作的分类过程中,每种动作所属的概率分布形状应该被认为是相同的,所以各个类型使用共同的协方差矩阵。
本文使用的训练集是由 150 ms 的时间窗截取的肌电信号所计算出的特征值组成的[11]。Hudgins 的研究[12]表明在肌电假肢控制模式分类中,仅需要提取 4 个时域特征就可以获得较好的分类结果。这 4 个特征分别是:平均绝对值(Mean Absolute Value,MAV)、过零率(Zero Crossing,ZC)、波长(Wave Form Length,WL)和符号改变斜率 (Slope Sign Change,SSC)。
为方便估计特征向量 x 所对应动作的最优决策,即 p(ck|x)取最大值时候的 k,对式(2)对数化,省略各类的相同项可得到线性判别函数:

对于每个特征向量 x,δ(k)最大值时所对应的动作k即为该段时间动作的最优决策。
2.2 SELDA 分类器
SELDA 分类器在每进行一次动作判别之后,新的特征向量会被加入到训练集中,用以更新线性判别函数的参数[13]。
但是,自适应数据由于是在非监督条件下获得,无法确切得知特征向量的类别。单纯的依靠线性判别结果,将其所属分类看作估计所得类型是不准确的。所以本文根据特征向量在各个类型上的后验概率分布来决定其对每个类型均值向量 μk和协方差矩阵 C 影响的权重,也就是利用后验概率 p(ck|x)对特征向量在不同的分类上进行加权[14](对于原始训练数据,由于其是在监督条件下得到的,类型已知,所以正确类型的p(ck|x)为 1,其他类型的p(ck|x)为 0)。所以,SELDA分类器中均值 μk和协方差矩阵C 被定义为:
根据贝叶斯公式,后验概率可以由先验概率求得,而先验概率由 LDA 判别函数补偿省略的各类相同项,并指数化得到:
所以 SELDA 方法中均值 μk和协方差矩阵 C 的更新公式为:


在每次判别之后,利用新的特征向量,根据公式(8)(9)进行更新。用更新后的均值 μk和协方差矩阵C 得到新的判别式用以下次判别,进而形成自适应反馈。其过程如图1 所示。
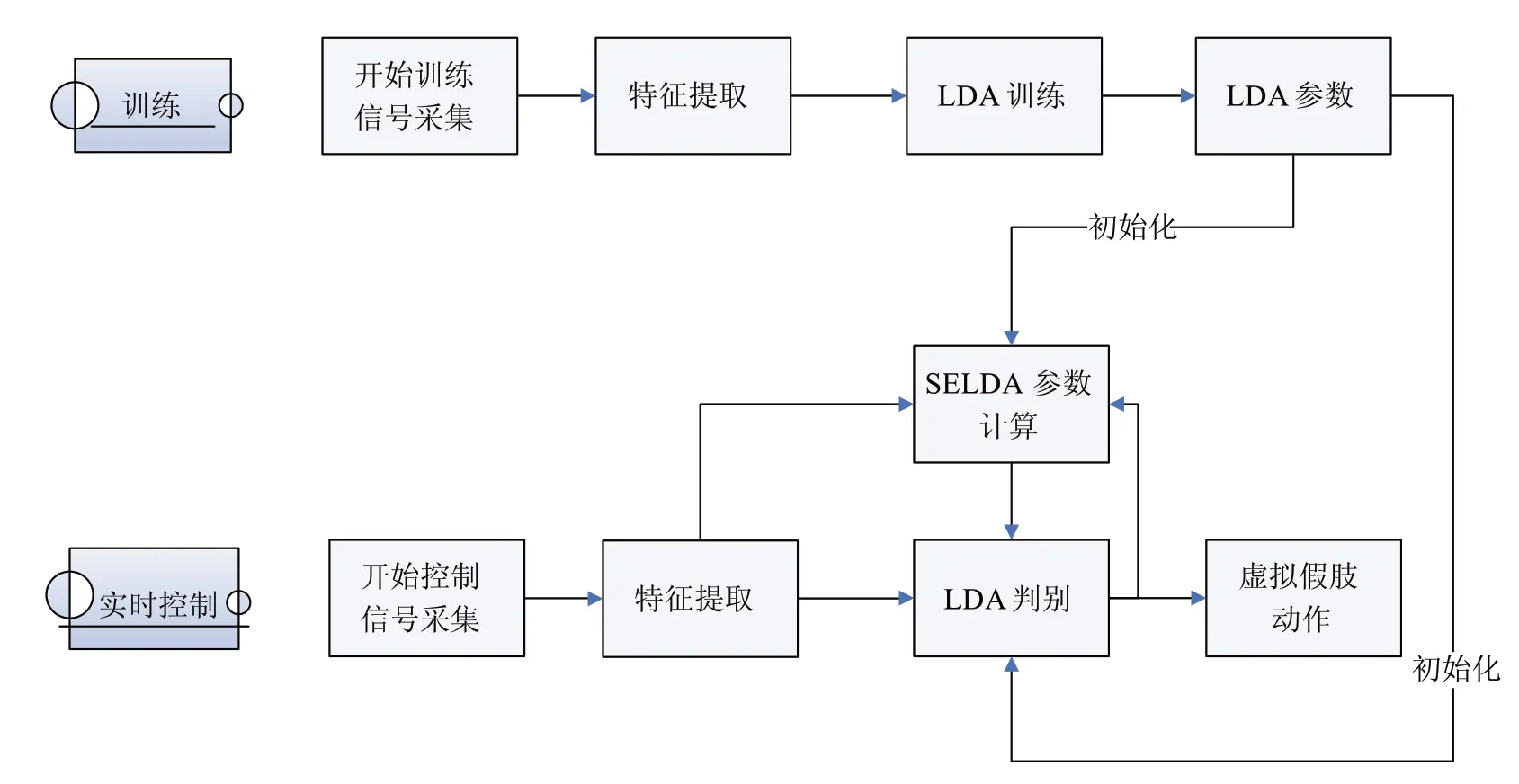
图1 SELDA 方法虚拟假肢控制系统结构图
2.3 CSLDA 分类器
因为假肢的实际使用是在非监管条件下进行的,新特征向量的类别属性要依靠 LDA 方法判断结果,而 LDA 方法自身发生的较严重的分类错误会在增量学习中产生持续影响。由于在肌电假肢控制中,时间窗短、数据更新快,相应的错误分类量也会比较多,所以在训练集每几分钟全部更新一次的情况下,本文尝试使用 CSLDA 分类器通过循环更新训练集的方法减小错误分类造成的持续影响。CSLDA 分类器在每次判别结束后,用实时数据代替相应类别训练集中旧的数据形成新的训练集,并用新的训练集重新训练分类器。
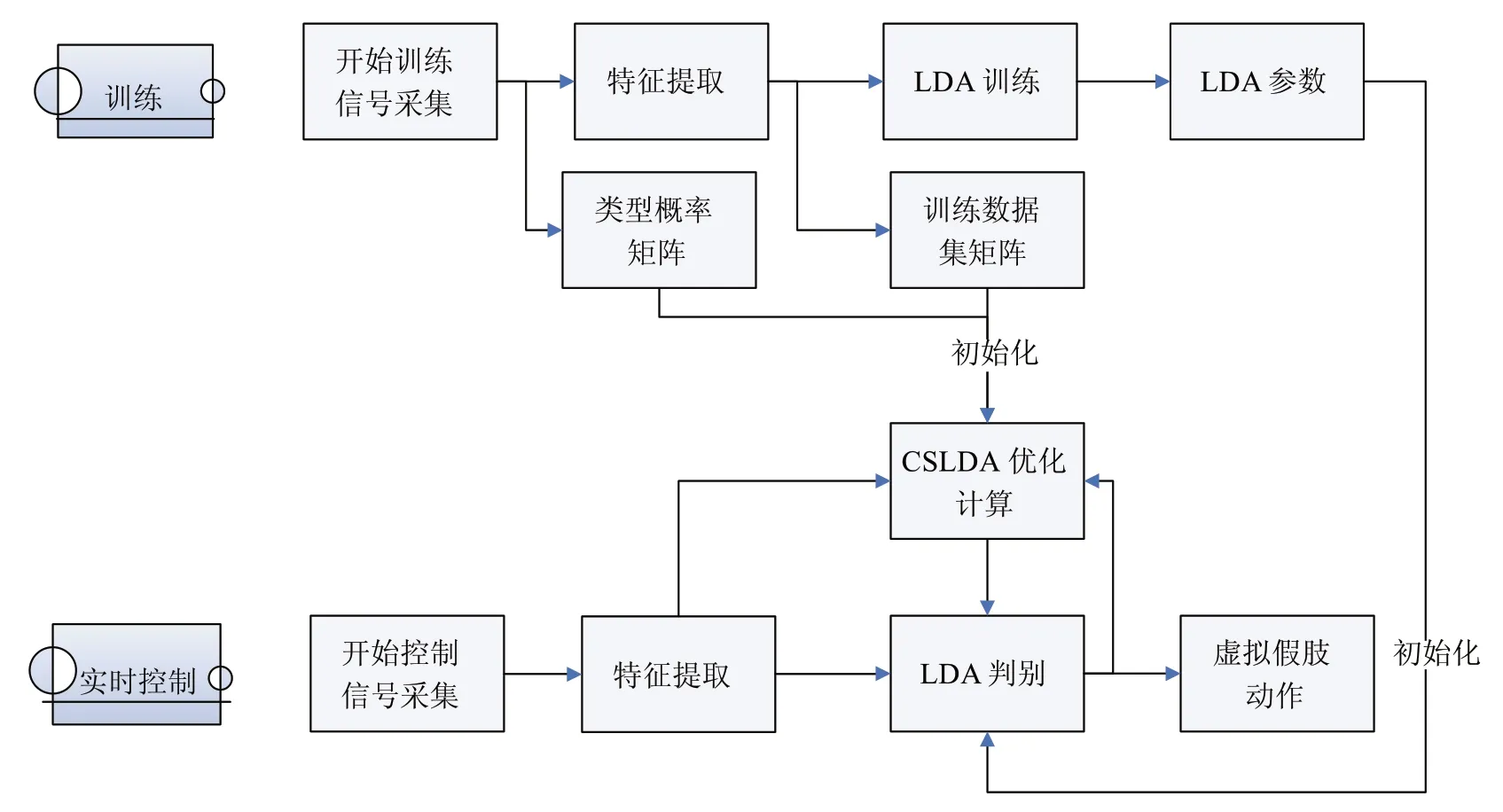
图2 CSLDA 分类器假肢控制系统结构图
为了保证自适应分类器的稳定性,避免在数据质量比较差的情况下得到的自适应分类参数偏差太大,造成无法自动纠正的误差,CSLDA 分类器要在自适应过程中保留部分原始训练集数据始终不被更新。
所以,CSLDA 训练集分成两个部分,保留部分一直保留部分原始训练集数据,而非保留部分不断循环更新。
同时,与 SELDA 一样,CSLDA 分类器需要利用后验概率加权对自适应数据进行加权。根据式(4)(5),在每次判别结束后重新训练分类器,具体实现过程,如图2 所示。
(1)在训练过程中,保存 LDA 训练集矩阵。
(2)根据各组训练数据所属类型形成概率矩阵,每行代表一个时间窗的数据,每列代表一种类型。训练集每组特征向量所属类型列值为 1,其他列值为 0 。
(3)在实时控制过程中,当新的特征向量进入到系统后,根据原有参数完成分类,记录这组特征向量和线性判别结果 δ(k)。
(4)根据 δ(k)计算后验概率向量 p(ck|x)。使用新的特征向量和后验概率向量更新原有训练集和概率矩阵,代替非保留部分估计分类组中对应类型的最旧的一组数据。
(5)根据新的概率矩阵和训练集,利用式(4)、式(5)求出新的 μk和 C,反馈给分类器,得到新的判别式,用于下一次判断。
(6)循环步骤 3 至步骤 5。
2.4 KALDA 分类器
卡尔曼滤波理论是一个最优化自回归数据处理算法[15]。其基本思想是:由量测值重构系统的状态向量,以“预测—实测—修正”的顺序递推,根据系统的量测值来消除干扰,再现系统的状态。采用信号与噪声的状态空间模型,利用前一时刻的估计值和现时刻的观测值来更新对状态变量的估计,求出当前时刻的估计值[16]。本文将卡尔曼滤波理论用于肌电假肢控制中,即 KALDA 分类器,其原理是根据新的特征向量及其分类结果,在前一时刻的 LDA 判别式参数的基础上对其进行最优化估计,得到新的 LDA 判别式参数[17]。
将根据式(3~8)得到的 LDA 判别式参数 wg和cg组成矩阵 X,并将特征向量 x 延长以适应参数矩阵 H:
KALDA 就是根据向量 Hk和上一状态的参数矩阵Xk-1及其协方差矩阵对现状态的参数矩阵 Xk-1进行最优估计,来更新 wg和 cg。
结合预测值与观测误差,根据卡尔曼滤波理论,可得现状态的最优化估算值:

其中,ek=Yk-p(ck|x) ,Yk为本次动作观测向量,表示为动作所属分类位置为 1,其他分类位置为 0 的向量。p(ck|x)是 Hk和 Xk-1的乘积对数还原后的结果,也就是线性判别方法中的后验概率。Kk为卡尔曼增益(Kalman Gain),根据卡尔曼滤波理论:

Ck为 Xk的协方差矩阵。UC 为卡尔曼滤波的更新系数,可以通过其调整卡尔曼滤波对判别式参数的影响程度。
这样,就得到了 k 状态下最优的估算值 Xk,将 Xk根据式(10)拆分即可得到更新后 LDA 判别式参数 wg和 cg,继而得到更新后的判别式。
为了使循环进行下去,更新 k 状态下 Xk的协方差矩阵:

总体来说,KALDA 方法就是将 LDA 判别式参数wg和 cg组成矩阵,并对这个矩阵进行最优估计,优化两个参数的取值。为了估计参数 wg和 cg,要根据旧的两个参数算出本次动作的后验概率,与观测到的结果作比较,比较的差值利用卡尔曼增益加权后补偿到原参数上,完成优化过程。整个过程如图3 所示。
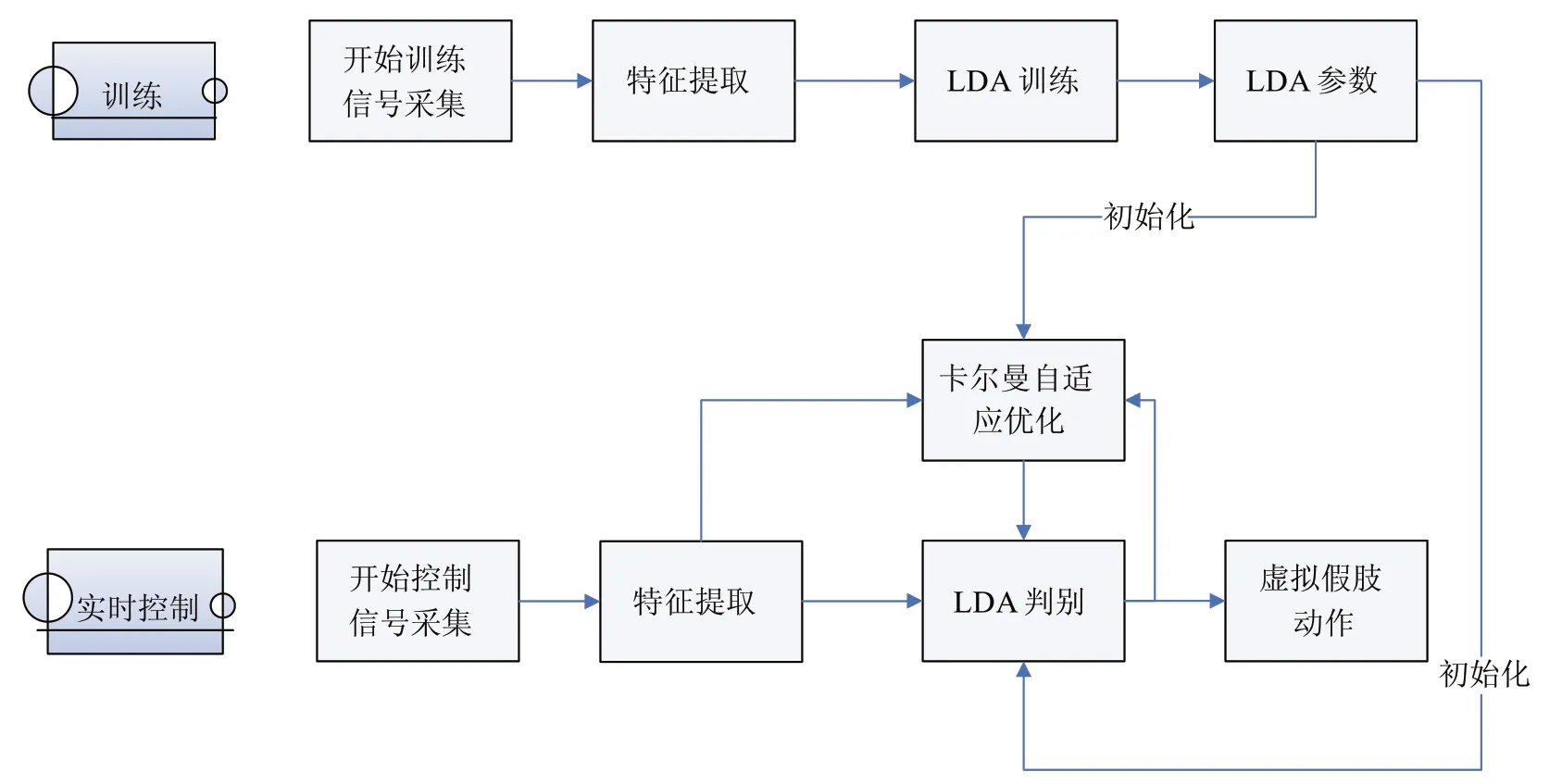
图3 KALDA 方法虚拟假肢控制系统结构图
3 实验分析
实验采集了 8 名受试者在执行 7 种手部或腕部动作时的手臂肌电信号,日常生活中的简单的动作大都可以由这些动作组合来得到。7 种动作包括4 种腕部运动(腕内、腕外展、腕内旋、腕外旋)、2 个手部运动(手张开、握拳)以及无运动的情况。
实验会播放各个标准动作的录像,每个动作状态保持 8 秒种,受试者依照示范进行动作,动作之间间隔 5 秒,受试者放松肌肉休息。动作如图4 所示。

图4 各个运动类型标准图示
信号采集完成后,首先对数据进行窗口分割。本研究采用的分析窗口的窗口长度为 150 ms,重叠部分为 50 ms,窗移为 100 ms。
利用经过窗口分隔后的 EMG 信号可以对每个窗口进行特征提取。计算出每一窗口的上文提到的四个特征参数值后,将其组成一个特征向量,再将所有通道在同一时间窗口下的特征向量级联形成一个 4×I维特征向量,I 为所有 EMG 信号通道的总数。
所得特征向量一部分用来训练,一部分用来测试,分别形成训练集和测试集。
实验结果如图5 所示。
实验表明:SELDA 和 CSLDA 相较于 LDA 方法可以明显的提高识别的准确率。LDA 方法的 8 组实验平均识别率为 90.6%,而 SELDA 和 CSLDA 可以分别达到到达 93.5% 和 94.4%,证明了这两种自适应方案的有效性,而 KALDA 实验结果不理想,识别率没有明显提升,只有 91.1%。
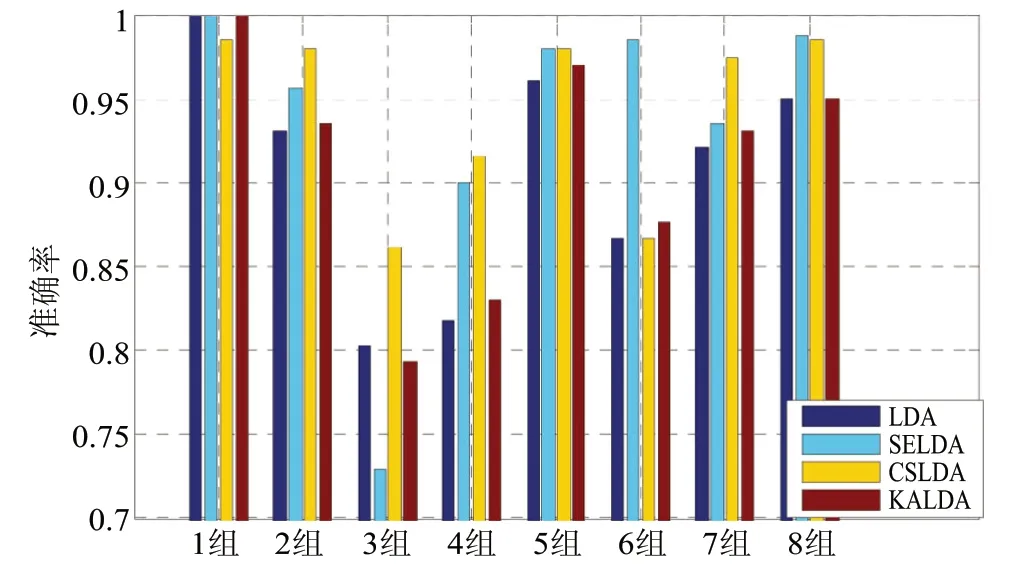
图5 LDA、SELDA、CSLDA、KALDA 的分类性能对比
其中,第三组数据 SELDA 效果不好,识别率低于 LDA,这组数据的具体分类情况如表1、表2、表3 所示。
对表1、表2、表3 进行对比,可以发现:由于训练或测试时受试者动作比较模糊等原因,分类器对于个别动作产生了较严重的分类错误,腕内旋与腕内收、腕内收与手张开分别发生了混淆。SELDA 和CSLDA 分类器对于 LDA 分类中混淆严重的腕内收动作都无能为力,且自适应过程依赖 LDA 分类结果,这就更加强化了分类错误。针对混淆程度较轻的腕内旋错误,CSLDA 分类器的表现要优于 SELDA 分类器。这是由于 CSLDA 的循环机制可以降低错误分类对分类器的持续影响。但是 CSLDA 的运算量和需要储存的数据要远远高于 SELDA,对设备的要求比较高,不如 SELDA 简便快速。
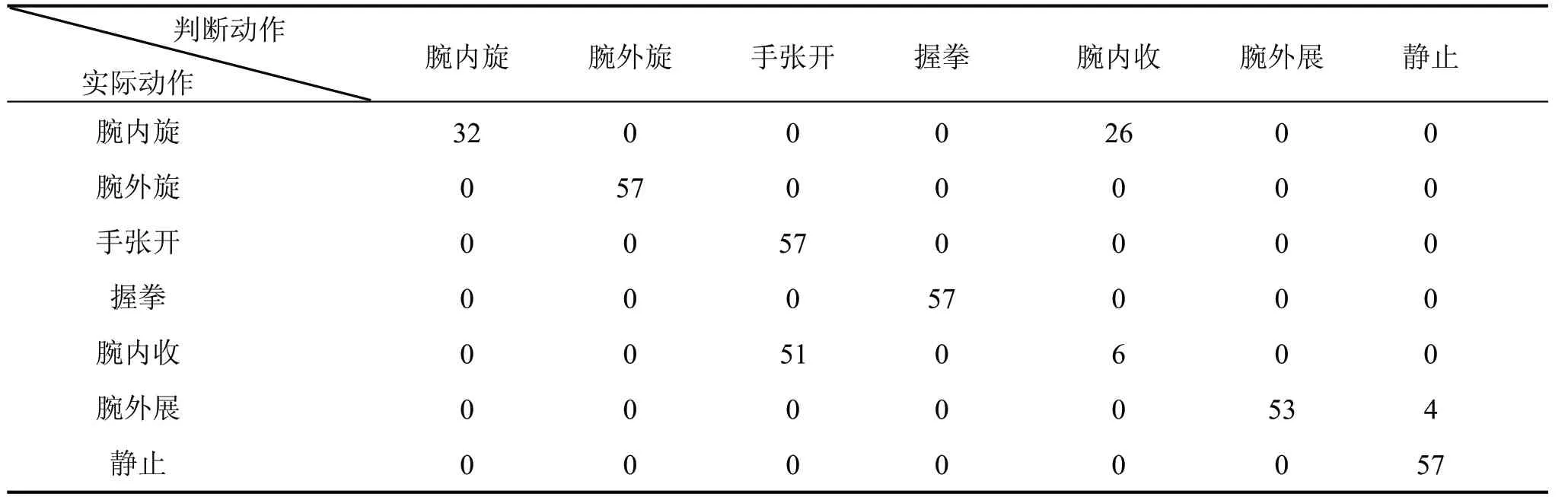
表1 LDA 方法对第六组数据的判断
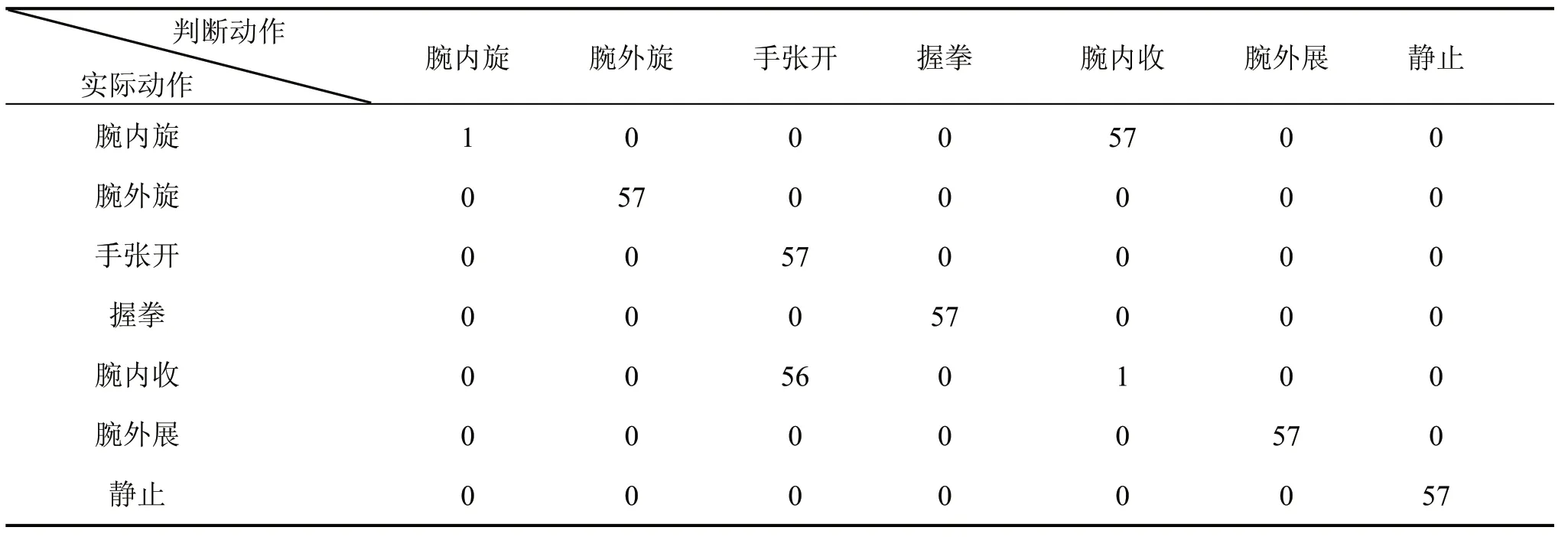
表2 SELDA 方法对第六组数据的判断
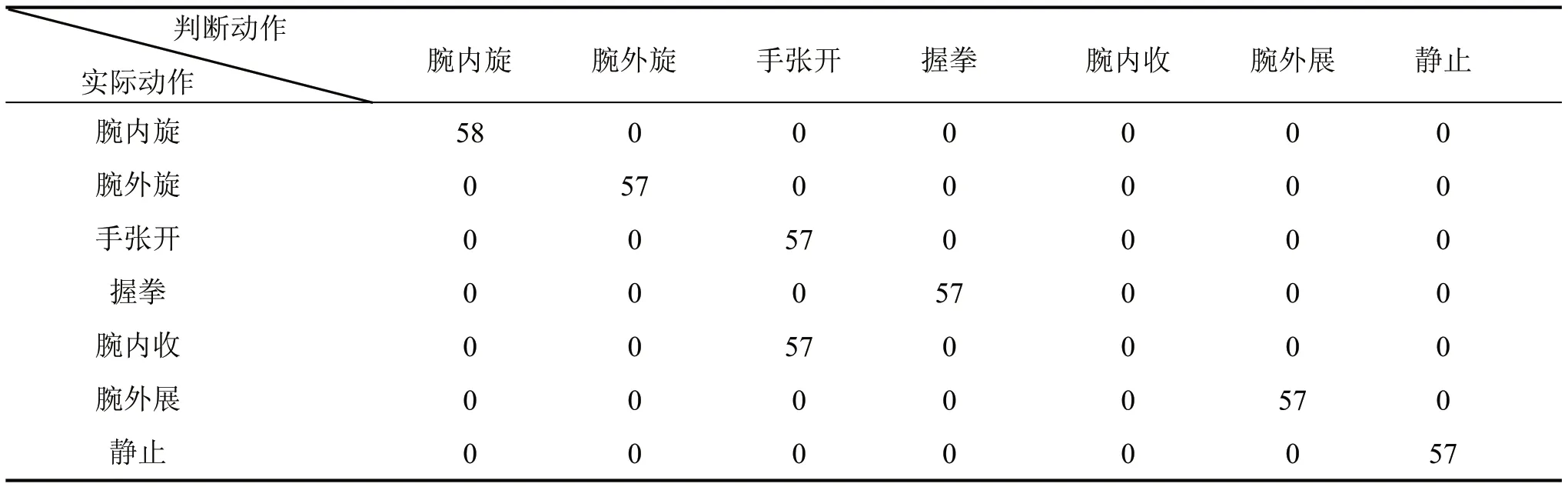
表3 CSLDA 方法对第六组数据的判断
KALDA 优化效果并不明显,因为在卡尔曼滤波过程中,需要使用 LDA 判断结果作为观测结果。所以,KALDA 分类器的效果受限于 LDA 的识别能力,只是对 LDA 分类器的一个优化,很难有质的提升,除非在有监督的条件下进行自适应过程。但是由于卡尔曼滤波的结果是使 LDA 判别得到的后验概率趋近于 1和 0,所以 KALDA 可以优化类交叉区域的分类效果,使交叉区域分类更加明确。而 LDA 和其他自适应方案的核心是计算正态分布的均值和协方差,也就是确定各类的相对位置和形状。所以,卡尔曼滤波具有的这一特性是另两种方法不具有的,可以达到互补的效果。故三种方案的结合是下一阶段研究的一个重点。
另外,实际使用过程中,对自适应数据进行筛选无疑是有助于提高自适应性能的。由于人类一个动作一般要持续 0.5 秒以上,而数据采集窗的移动速度是 0.1 秒,所以,本文在将数据用于自适应前,加入一个判断,使只有前后 2 次判断类型与本次判断相同时,才将其用于自适应优化。同时,当数据最优决策类型的后验概率值较小或者各类型的后验概率值差别不够大时,可以认为该数据类型特点不突出,分类比较模糊,不用于自适应优化。
4 总结与展望
自适应机制对于肌电假肢的实际应用是非常重要的,可以有效的提高识别准确性,提高假肢的性能和安全性。本文尝试了三种不同的自适应方案:SELDA可以较好的完成自适应任务,但是对于连续错误判断的应对能力不足;CSLDA 具有最佳的性能,但是需要占用较多的资源,代价最大;KALDA 具备其他两种方案不具有的对于交叉区域的处理能力,但是目前受限于 LDA 分类器本身的识别率,单独使用效果不理想。在实际应用中,应针对具体情况选择适当的自适应方案。不同方案的结合将是下一阶段的研究重点。
[1]宁志杰, 孙磊. 现代矫形器与假肢的应用 [M]. 北京: 军事医学科学出版社, 2004.
[2]Pinzur M S, Angelats J, Light T R. Functional outcome following traumatic upper limb amputation and prosthetic limb fitting [J]. Journal of Hand Surgery-American Volume, 1994,19: 836-839.
[3]Hargrove L, Englehart K, Hudgins B. A comparison of surface and intramuscular myoelectric signal classification [J]. IEEE Transactions on Biomedical Engineering, 2007, 54: 847-853.
[4]张志勇. 肌电信号采集与肌电假肢控制的研究 [D]. 哈尔滨:哈尔滨工业大学, 2010.
[5]Hudgins B, Parker P, Scott R. A new strategy for multifunction myoelectric control [J]. IEEE Transactions on Biomedical Engineering, 1993, 40(1): 82-94.
[6]Sensinger, Lock J W. Adaptive pattern recognition of myoelectric signals: exploration of conceptual framework and practical algorithms [J]. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2009, 17: 270-278.
[7]Kato R, Yokoi H, Arai T. Real-time learning method for adaptable motion-discrimination using surface EMG signal [C]// Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China,2006, 2127-2132.
[8]Oskoei M A, Hu H. Adaptive myoelectric human-machine interface for video games [C]// 2009 IEEE International Conference on Mechatronics and Automation, Changchun China, 2009: 1015-1020.
[9]华鹏. 贝叶斯决策及分析若干问题的研究 [D]. 山东: 山东大学, 2004.
[10]钟珞, 潘吴, 封筠, 等. 模式识别 [M]. 武汉大学出版社, 2006.
[11]余龙, 吴禄慎, 张志勇, 等. 基于虚拟现实技术的多功能肌电假肢控制系统开发平台 [J]. 计算机测量与控制, 2011, 19(3):609-612.
[12]Englehart, Hudgins B, Parker P A, et al. Classification of the myoelectric signal using time-frequency based representations[J]. Medical Engineering and Physics, 1999,21(6): 431-438.
[13]陈歆普. 基于肌电信号的多模式人机接口研究 [D]. 上海: 上海交通大学, 2011.
[14]Blumberg J, Rickert J, Waldert S, et al. Adaptive classification for brain computer interfaces [C]// The 29th Annual International Conference of the IEEE EMBS Cité Internationale,Lyon, France, 2007: 2536-2539.
[15]张友民, 戴冠中, 张洪才. 卡尔曼滤波计算方法研究进展 [J].控制理论与应用, 1995, 5: 65-74.
[16]最佳状态估计理论-卡尔曼滤波方法研究 [DB/OL]. http://wenku.baidu.com/view/753a86e59b89680203d825a3.htm L.
[17]Vidaurre C, Schlögl A, Cabeza R, et al. Study of on-line adaptive discriminant analysis for EEG-based brain computer interfaces [J]. IEEE Transactions on Biomedical Engineering,2007, 54(3): 550-556.
猜你喜欢
中国典型病例大全(2022年7期)2022-04-22
中国药学药品知识仓库(2022年1期)2022-03-23
海外星云(2021年6期)2021-10-14
中外文摘(2020年19期)2020-10-31
统计与决策(2019年6期)2019-04-22
意林·全彩Color(2018年7期)2018-08-13
雷达学报(2017年6期)2017-03-26
现代电生理学杂志(2016年4期)2016-07-10
中国康复理论与实践(2015年7期)2015-05-09
体育科学研究(2015年4期)2015-02-28
