
汽车驾驶员模型建立
2013-06-01 06:59河北联合大学迁安学院卢艳楠岳立喜梅桂静燕山大学
电子世界 2013年13期
河北联合大学迁安学院 卢艳楠 岳立喜 梅桂静燕山大学 马 雷
汽车驾驶员模型建立
河北联合大学迁安学院 卢艳楠 岳立喜 梅桂静燕山大学 马 雷
根据预瞄最优曲率理论及模糊控制理论,利用Matlab/Simulink软件建立模糊PID控制驾驶员模型,并引入对驾驶员预瞄时间的控制,分析预瞄时间函数对轨迹跟踪效果的影响,从更广的方面研究驾驶员的特性。通过仿真与实车实验证明,所建立的驾驶员模型具有较高的准确度,能够较好的拟合车辆的行驶轨迹,其操作特性与真实驾驶员较为接近。
驾驶员模型;模糊PID控制;预瞄时间函数
1.引言
驾驶员模型是个复杂的控制系统,它包括方向控制、驱动控制、制动控制等,其中方向控制是驾驶员模型研究的核心。自上世纪中期以来,基于传统控制理论、模糊控制理论、神经网络控制理论等,人们先后提出了各种驾驶员控制模型。Ashkens I I and Me Ruer D t提出的Crossover模型用来估计有扰动闭环控制系统的稳定性,但不适用于快速驾驶[1]。MarAdam C C提出了一种可以投入到实际应用工程中更灵活、有效的模型,但这些研究结果也存在弊端,表现在预瞄的固定时间无法适应车速的变化,导致预瞄的距离不确定[2]。郭孔辉院士于1982年提出了预瞄跟随系统理论[3],认为驾驶员的决策分为预瞄阶段和补偿跟随阶段,其驾驶员的校正环节依赖于汽车动力学模型,对整车方向控制至关重要。
上述这些驾驶员模型都是建立在传统控制理论基础上,通过大量的试验或仿真确定汽车的传递函数,然后再根据汽车的动力学传递函数特性来确定驾驶员模型。然而,对于汽车这种复杂的被控对象,不易建立精确的传递函数,并且在现有试验条件下通过系统辨识建立的传递函数同样存在精度低的缺点,甚至不可被用于驾驶员模型,不能满足车辆控制。模糊逻辑能比较好的解决无法建模的复杂问题,分析问题时更加符合人的要求。因此,本文在建立可调预瞄时间函数的同时,建立模糊PID控制驾驶员模型,将驾驶员的校正环节与汽车动力学模型分开分析。
2.驾驶员模型建立
2.1 道路偏差
驾驶员对汽车方向的控制源于预瞄点处道路偏差[4]的存在,在0时刻,汽车从大地坐标系原点处以速度u开始做平面行驶,汽车沿大地坐标系X轴方向的速度为Vx,沿Y轴方向的速度为Vy,则在任何时刻:


在预瞄点处的坐标为(Xp,Yp):

预瞄点处道路轨迹纵坐标:

道路偏差:

图1是车辆行驶轨迹偏差示意图。
2.2 驾驶员模糊PID控制器设计
模糊PID控制器根据偏差e和偏差变化率ec输出PID参数PK、IK、DK,或者PID参数的增量PKΔ、IKΔ、DKΔ,能够实现PID参数的在线整合,具有控制灵活及适应性强的优点,又具有PID控制精度高的特点,能够实现驾驶员模型对于车辆方向的良好控制。
2.2.1 输入输出变量的选取和量化
本文所建立的模糊PID控制驾驶员模型,其模糊控制部分基于预瞄点处道路偏差反馈,以预瞄点处道路偏差pe和偏差变化率 为模糊控制器的输入,PID参数的增量PKΔ、IKΔ、DKΔ为输出。输入、输出变量的变化范围,以及它们的量化等级、量化因子、比例因子见表1所示。选择各变量的隶属度函数为三角形函数。
2.2.2 模糊规则设计及解模糊
参数模糊自整定PID控制器在系统运行中,实时监测误差e及误差变化ec,并根据模糊控制原理对PK、IK、DK三个参数实行在线修改,以使其不断适应时刻变化的e和ec,使控制器具有一定鲁棒性能,且被控系统具有良好的稳定性[3]。根据他人对PID参数整定经验制定模糊规则:

表1 输入输出语言变量
通过间接法进行模糊推理,在得出模糊控制器的输出KP、KI、KD后,可实时计算PID的参数。

其中,Kp0,KI0,KD0为PID参数初始值。
建立PID控制驾驶员模型,并在一般弯曲道路上进行仿真试验,通过不断调整使轨迹误差达到最小的方法可以得到该初始值
进行大量的仿真试验,最终确定:Kp0=7,KI0=0.0002,KD0=0.001。
2.3 预瞄时间函数建立
驾驶员的预瞄距离因道路曲率的不同而发生变化,而道路曲率可以简化为道路偏差,因此有必要建立预瞄时间T对于道路偏差ep的较为理想的函数关系,并分析可调整预瞄时间T对车辆轨迹跟踪的影响。驾驶员预瞄距离调整过程如图2所示。
在t1时刻,预瞄距离为d1,预瞄点落在大地坐标系上的A1点,此时,道路偏差由小变大,驾驶员需要对预瞄距离进行调整;在t2时刻,车辆行驶距离为s,预瞄距离减小为d2,预瞄点落在A2处,预瞄距离变化Δd,由图得:s=s1+Δd。
对于调整后的预瞄点A2,可能落在A1的前方,也可能落在A1的后方。当A2落在A1的后方,即s1<0,预瞄距离不变与A2落在A1的后方相矛盾,此时预瞄距离发生严重振荡,因此必须保证A2落在A1的前方,即s1>0。设车速为u,预瞄距离的平均变化率为k,由Δd<s得:k<u。在车速u一定的情况下,可以用预瞄时间T代替预瞄距离d,当道路偏差ep>0时,T应该是关于ep的单调递减函数,并且随ep的增大,T逐渐趋于一稳定值。符合这些要求的函数有很多,图3列举其中两种。
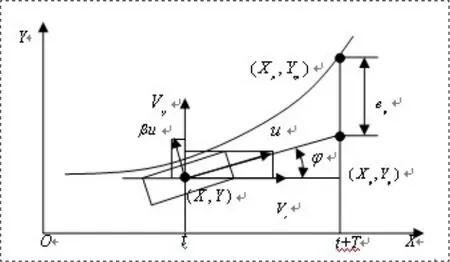
图1 车辆行驶轨迹偏差示意图

图2 驾驶员预瞄时间变化过程

图3 预瞄时间函数
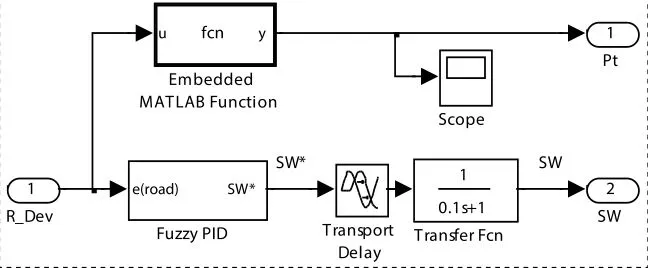
图4 驾驶员模型补偿校正环节

图5 仿真模型
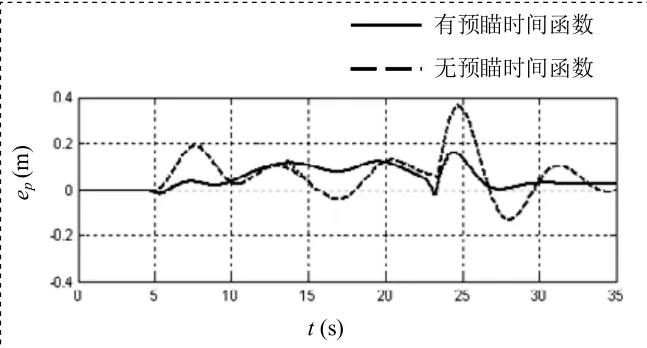
图6 轨迹偏差曲线
图(a)为sigmoid函数的变形,图(b)为概率曲线。图(a)中T在ep=0不可导,当ep由负变正的过程中,T由增大趋势迅速变为减小趋势,即预瞄点A由远离车辆迅速变为靠近车辆,易发生上述的s1<0的情况,因此这是应该避免的情况;图(b)中因为T在ep=0处可导,不会发生上述情况,因此选择图(b)中类型曲线作为预瞄时间函数曲线较为合适。经过仿真试验及参数调整,最终确定预瞄时间函数为:

2.4 驾驶员模型完整补偿校正
在建立驾驶员模糊PID控制器及预瞄时间函数之后,并且根据驾驶员神经反应滞后及手臂、方向盘惯量滞后的特点,可建立驾驶员模型补偿校正环节,如图4所示。
其中,输入为预瞄点处道路偏差,输出1为预瞄时间T,输出2为方向盘实际转角,驾驶员神经滞后环节td= 0 .3,惯量滞后环节时间常数th= 0 .1。
3.动力学仿真
3.1 仿真模型建立
完整的驾驶员模型,包括感知环节、预瞄环节、补偿校正环节[4]。感知环节根据车辆的y方向速度,及预瞄时间T,感知在T时刻后,车辆y方向的位置;预瞄环节根据当前车辆x方位向置,以及车辆方位角,计算预瞄距离d处的y坐标;补偿矫正环节根据预瞄点处y坐标偏差,计算出补偿该偏差的方向盘转角,并且进一步调节预瞄时间T。将在Matlab/Simulink仿真环境下建立的驾驶员模型放入到相同环境下的整车控制模型中,建立完整的仿真模型。如图5所示。
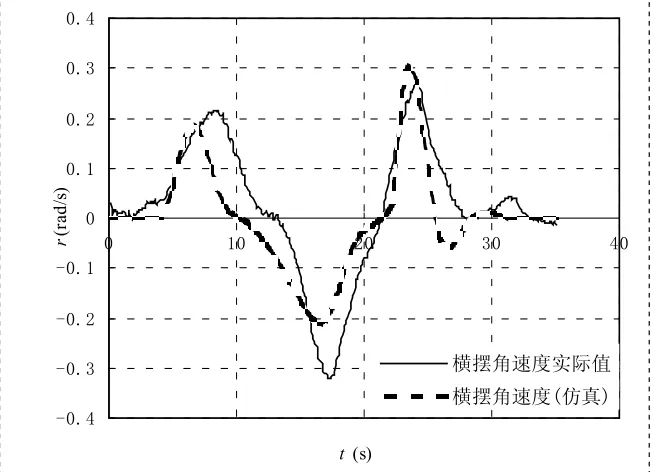
图7 方向盘转角曲线

图8 横摆角速度曲线

图9 轨迹曲线对比
3.2 仿真结果分析
本文以“偏置直线+半S”曲线作为车辆行驶道路轨迹,在其他参数相同的情况下,分别进行有预瞄时间控制的仿真,和无预瞄时间控制的仿真,以便研究可变预瞄时间对于车辆跟踪轨迹的影响。
图6对比了两种情况下的轨迹偏差,可以看出,无预瞄时间控制的偏差的几何平均值要远远大于有预瞄时间控制的情况,进一步验证了预瞄时间控制的优越性。
4.试验结果对比
图7、图8为跟踪“偏置直线+半S”时,熟练驾驶员操纵试验车真实情况,与驾驶员模型操纵车辆模型仿真情况对比图,为了便于对比两种情况,方向盘转角和横摆角速度仿真值都进行了取相反数处理。
从图7可以看出,在跟踪相同道路时,驾驶员模型与熟练驾驶员在方向控制上并不完全一样,在某一时刻,方向盘转角幅值并不相同,但是两条曲线的形状接近,变化趋势相似,图8的横摆角速度响应曲线也具有同样的特点。
图9为熟练驾驶员轨迹跟踪曲线、驾驶员模型跟踪曲线和目标轨迹对比图。
图9中驾驶员模型跟踪曲线与熟练驾驶员轨迹跟踪曲线比较接近。因此,可以认为,所建立的基于可调预瞄时间的模糊PID控制驾驶员模型具有较高的精度,其行为特性与熟练驾驶员较为相似。
5.结论
(1)依据预瞄最优曲率理论及模糊控制理论,建立了模糊PID控制驾驶员模型,将驾驶员的校正环节与汽车动力学模型分开分析,从更广的方面研究驾驶员的特性。
(2)建立预瞄时间函数,分析预瞄时间函数对轨迹跟踪效果的影响。通过仿真证明,验证了预瞄时间的可调性,且预瞄时间函数能够提高车辆轨迹跟踪品质。
[1]AshkenasIL,McRuer DT.A theory of handling qualities derived from pilot-vehicle system considerations A.Pro-ceedings of IEEE IndustryApplications Socicty Meeting[C].1962.
[2]MacAdam C C.An optimal preview control for linear sys-terns[J].Journal of Dynamic Systems,Measurement,and Control,1980,102(3):188-190.
[3]郭孔辉,马凤军,孔繁森.人—车—路闭环系统驾驶员模型参数辨识[J].汽车工程,2002,24(1):20-24.
[4]高振海,管欣,郭孔辉.驾驶员方向控制模型及在汽车智能驾驶研究中的应用[J].中国公路学报,2000,13(3):106-109.
卢艳楠(1985-),女,黑龙江哈尔滨人,河北联合大学迁安学院机电与信息系助教,主要研究方向:智能车辆、机电一体化。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
汽车实用技术(2022年4期)2022-03-07
学生天地(2020年6期)2020-08-25
读友·少年文学(清雅版)(2020年4期)2020-08-24
数学年刊A辑(中文版)(2020年2期)2020-07-25
读友·少年文学(清雅版)(2020年3期)2020-07-24
现代装饰(2018年5期)2018-05-26
中国三峡(2017年2期)2017-06-09
公民与法治(2016年4期)2016-05-17
系统医学(2016年8期)2016-02-20
