基于激光测距的自动防撞系统方案设计
2013-06-01 12:39康迂福
机电工程技术 2013年9期
康迂福,冯 桑,陈 爱
(1.河源职业技术学院,广东河源 517000);2.广东工业大学,广东广州 510090)
随着我国经济水平和百姓生活水平的提高,国内汽车产业不断壮大,越来越多的汽车进入普通家庭,每年新增大量驾驶员。汽车保有量的剧增,新增驾驶员的驾驶技术方面不够娴熟,使得交通事故的发生率大大提高,其中最为突出的就是汽车的碰撞。现有的车辆防碰撞系统只有停留在低速状态下基于超声波雷达的研究,其他防碰撞系统都由于其技术、经济性能等原因而没能普及。对交通事故应该尽量做到防患于未然,本文所研究的车辆防碰撞系统是一种主动式车辆事故规避系统,能够大量减少车辆碰撞事故,提高行车安全性。
1 测距原理
目前测距技术,主要采用超声波、红外线和激光测距。其原理基本相似,测距是对目标发射一个或一列很窄的脉冲,通过测量脉冲到达目标并由目标反射返回到接收系统的时间计算出目标的距离。设目标距离为S0,脉冲往返时间为t,测量脉冲在真空中的传播速度为v(在空气中传输受介质、气压、温度、湿度的影响可忽略),则目标距离为:

在脉冲测距中,t通常是通过测距计数器对从发射脉冲到目标并从目标返回到接收系统期间,累计进入计数器的时钟脉冲个数来测量的。
设在t 时间内,有N 个时钟脉冲进入计数器,则目标距离可由式(2)计算:

2 防撞系统整体方案设计
本文研究汽车自动防撞系统,根据系统功能原理,将系统分为数据采集、数据处理、声光报警以及执行制动若干个部分。系统原理图如图1所示。
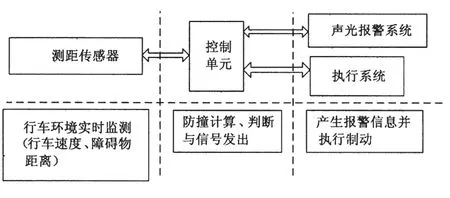
图1 系统原理图
3 ABS制动距离算法与建模
汽车制动距离是指对行驶中的汽车实施紧急制动,从踏制动踏板开始到完全停车为止,汽车所驶过的路程,即汽车需要紧急停车时,其行车制动系所能实现的最小停车行程[2]。
ABS(Anti-lock Braking System防抱死制动系统),其作用是在汽车制动时,防止车轮抱死,防止汽车在紧急制动时产生侧滑和跑偏,以提高汽车制动过程中的行驶稳定性的汽车安全控制系统。
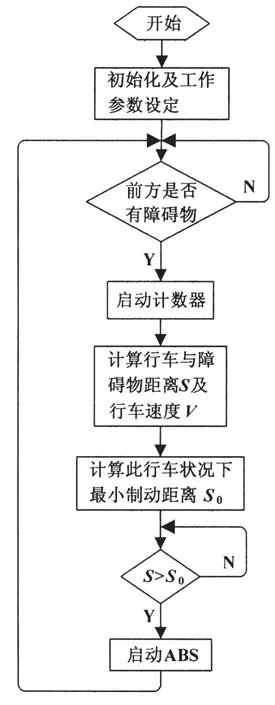
图2 控制单元工作流程图
从制动时刻开始,制动距离S、行驶速度vt,制动阻力f,车轮与地面的摩擦系数之间的关系分别为[3-4]:

在地面附着系数φ 与汽车行驶过程中的滑移率s 决定,通过文献[5]的研究结果,φ-s 的关系可用图3所示曲线描述。
综合算式(3)~(6)和图3,可以得到ABS制动距离的计算模型如图4所示。
该ABS 算法模型中设置车身参数,并将行驶过程中其他参数理想化之后,在模型中输入Initial Vehicle Speed v0(行车速度v0)后,经过计算便可得到Stopping Distance(制动距离S0)。
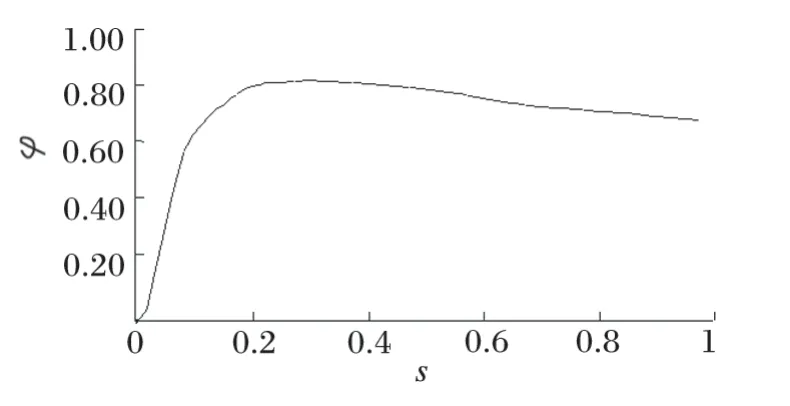
图3 附着系数和滑移率曲线
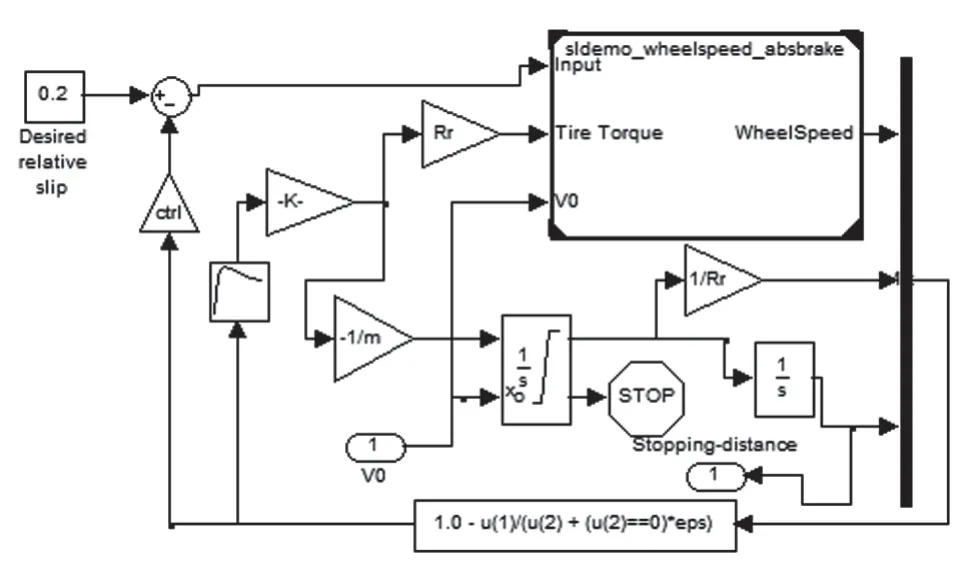
图4 制动距离算法模型
4 系统建模及仿真分析
根据行车的实时速度,可以得到一个在该车况下的ABS 制动距离S0。再将S0作为参考值,与激光传感器获取的行车与障碍物间的距离S 进行比较,当S ≤SS·S0(其中SS为安全系数)时,单片机向ECU 发出指令。当ECU 接收到指令时,ECU立即启动ABS进行制动。
因此,基于Matlab/Simulink 的建模,得到整个系统的仿真模型如图5所示。

图5 系统仿真模型
首先通过产生一个线性信号,模拟激光测距系统传送距离值,通过分析计算出此时的行驶车速。笔者设定初始速度为80 km/h的速度行驶,并且计算出在此行驶初速度下需要的最小制动距离S0,当实际行车与障碍物的距离小于最小制动距离S0的时候,单片机(MCU)向ECU 发出信号,要求ECU启动ABS制动。
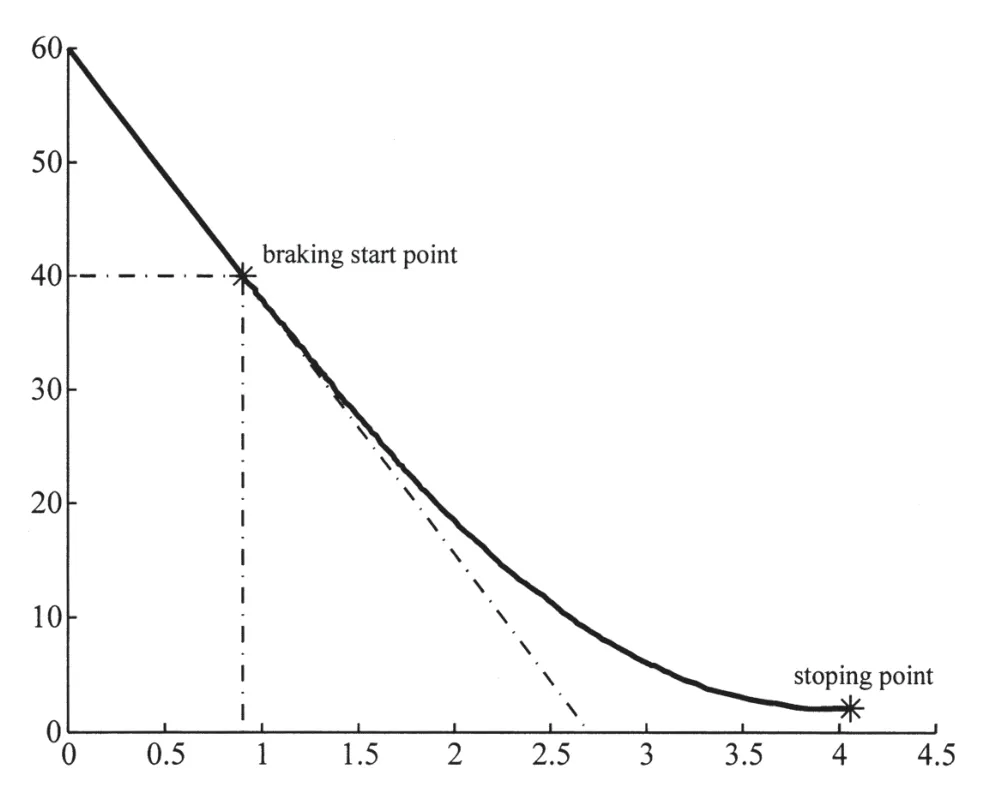
图6 行车与障碍物距离
5 实验仿真结果及分析
行车以80 km/h的初速度行驶过程中,当距离障碍物60 m时,系统检测到了前方有障碍物,并计算出制动距离S0,当行车与障碍物距离为SS·S0时(SS为制动距离安全系数),系统开始启动ABS进行制动,并且随之汽车开始减速,直至汽车完全停止。
根据文献[6]的大量数据实验分析,Jetta GTX轿车的实车紧急制动实验数据。其制动距离与制动初速(试验车速范围:30~80 km/h)的关系(拟合公式)为:

式(7)中,S—制动距离(m);v—制动初始速度(km/h)。
结果表明,在一定误差范围内,仿真结果和实验结果是一致的。通过该模型,根据行车初始速度计算制动距离,并做出预测,能非常有效地减少汽车行驶碰撞事故。
6 结束语
(1)通过基于Matlab/Simulink 的建模仿真,对ABS 制动系统进行仿真分析,结果表明,系统实现了ABS 的实时控制功能。在同一模型上,进行了车速与制动距离的仿真,仿真结果表明,该系统模型在理论计算上能够有效的实现防撞功能,从一定程度上减少交通事故的发生和损失。
(2)本系统模型基于干燥良好路面上进行计算分析,得到的模型会有一定局限性。下一步研究将综合考虑影响汽车制动距离的各种因素,改进制动距离模型算法,提高系统精度。
[1]刘岩川,王玲芬,栾慧,等.基于激光测距技术的汽车防撞系统的研究[J].仪表技术与传感器,2008(11):96-98.
[2]王万平,李强,廖胜.固定目标的运动单站被动测距[J].红外与激光工程,2008,37(1):185-188.
[3]GB12676-1999.汽车制动系统结构、性能和试验方法[S].
[4]吴诰珪,赵克刚,范刚,等.附着系数-滑移率曲线的测定[J].华南理工大学学报,2001,(29)9:20-22.
[5]王润琪,蒋科军.ABS 汽车制动距离分析与计算[J].中南林学院学报,2005,25(2):70-74.
[6]罗新闻.汽车ABS 试验系统开发研究[D].天津:河北工业大学,2007.
猜你喜欢
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
科学(2020年3期)2020-01-06
小哥白尼(趣味科学)(2018年12期)2018-12-18
汽车工程师(2018年1期)2018-07-13
电子制作(2017年7期)2017-06-05
中国公路(2017年13期)2017-02-06
民用飞机设计与研究(2015年3期)2015-12-07
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
太空探索(2014年1期)2014-07-10