
半潜钻井平台动力定位与锚泊混合定位控位能力分析方法研究
2013-06-12 06:54张本伟杨清峡梁园华
船海工程 2013年3期
张本伟,杨清峡,梁园华
(中国船级社 海工技术中心,北京100007)
在海洋油气开发中,选取半潜钻井平台的定位方式十分重要。常见的定位方式有锚泊定位和动力定位。锚泊定位一般适用在作业水深300~1 000 m的范围,动力定位方式理论上不受水深的限制,但是出于经济性考虑,常用在水深1 000 m以上的作业海域,二者随水深的成本变化见图1。
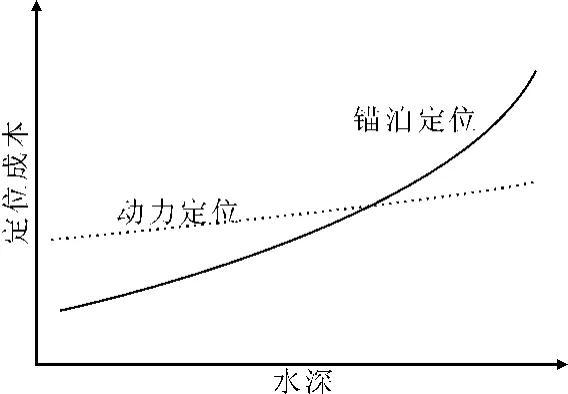
图1 锚泊与动力定位系统成本与水深关系
锚泊定位技术研究和应用比较早,分析和计算方法也有很多。动力定位技术的研究和应用比锚泊起步晚一些,但从目前全球对动力定位系统的使用和开发来看,动力定位也已成为一种比较常见的定位方式。锚泊定位和动力定位都有自己的优点和缺点,在具体应用中,通常根据不同的平台类型和区域作业要求,选择定位方式。
随着海洋开发区域的全球性发展,针对半潜式钻井平台工作的一些特殊海区,紧靠一种单独的定位方式,无法满足定位作业要求。二者的混合定位方式在近几年已经出现。比如在挪威北海Haltenbanken海区。该海域水深在300 m左右,其显著特点就是海况恶劣,挪威船级社在规范中明确要求,锚泊定位需要满足100年一遇的风和浪,及10年一遇的流,因此单独使用一种定位方式,平台的作业窗口期很短,极大地影响了平台的使用效率。同时,混合定位方式也可以节约成本[1]。
KONGSBERG公司早已开始动力定位和锚泊定位混合定位模式的研究,推出了成熟的混合定位模式产品DP-M,但是截至目前,国内对其内部的核心技术了解甚少。
本文结合位于挪威北海作业的某半潜钻井平台所使用的混合定位模式,研究一种半潜钻井平台混合定位模式下控位能力的分析方法。
1 锚泊定位
半潜平台锚泊定位示意见图2。锚泊分析分为准静态和动态分析,其中动态又分为时域和频域分析。
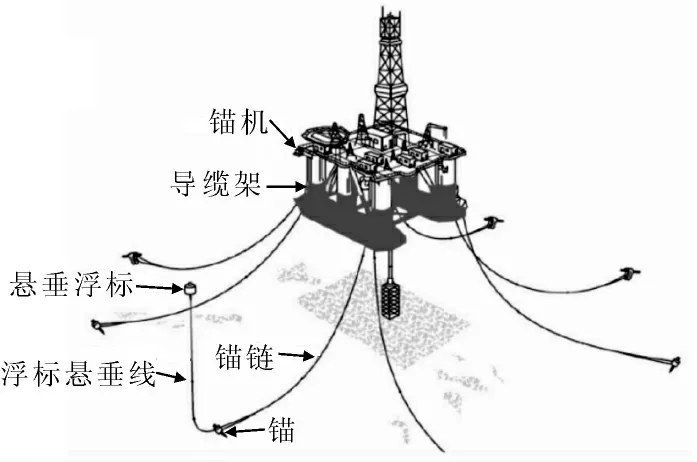
图2 半潜平台锚泊定位示意
在分析过程中,一般包括风、浪、流因素。其中风考虑为稳态风,流考虑为恒流,波浪的成分比较复杂,一般包括波频,低频,其中低频包括二阶波漂力,为定值。锚泊分析主要是对锚链强度和疲劳等进行分析。
分析工况包括在作业和自存海况下平台的完整、破损和瞬态(一根锚链断裂)工况。
系泊平台在风力(定常)、恒流力和波漂力的联合作用下将从无环境力作用时的初始位置偏移至新的平均位置,在此平均位置上,系泊系统的复原力将平衡环境因素对平台所施加的上述定常力。波浪还在此新的平衡位置上引起系泊平台的波频和低频运动。
波频运动和低频运动可由模型试验或计算分析求得。波频运动一般可与低频运动分开计算。在波频运动分析中,由于平台的纵荡、横荡和首摇运动的固有周期远大于波浪周期,一般可不考虑系泊系统质量及弹性对波频运动的影响。在低频运动分析中,一般可只考虑系泊平台的低频纵荡、横荡和首摇运动。系泊平台的低频运动为集中在系泊平台固有频率附近的极度狭带的响应。运动幅值取决于系泊系统的刚度和阻尼。
关于半潜钻井平台的锚泊定位系统的设计衡准、分析方法可以参考的材料很多,比如API RP2SK,API RP 2SM,ISO19901-7(2005),各大船级社规范,政府法规等等。
2 动力定位
动力定位技术最早开始于上世纪70年代,用于海洋开发,目前对其研究和应用已经比较成熟。
动力定位主要是利用计算机自动控制推进器抵抗风浪流环境力,保持平台/船舶的位置和艏向。这里所能抵抗的风浪流包括稳态风,海流力及波浪载荷中的二阶力波漂,其他运动载荷,动力定位系统不于考虑,其控制原理见图3。

图3 半潜平台动力定位控制原理
动力定位系统推进器发出的推力的使用分为两部分:一部分为抵抗静载荷,就是由风、流和二阶波漂力组成;另一部分为抵抗动载荷,控制平台运动位移及艏向。行业内对推进器使用的考虑一般是每个推进器可用推力的80%,用来抵抗静载荷,剩余20%用来抵抗动载荷。
目前,对于动力定位系统的控位能力分析都是基于上述原理进行的。可以参考的行业标准比较多,比如有API RP 2SK,以及国际海事承包商协会(IMCA)等推荐办法。
3 动力定位辅助锚泊定位
目前,对动力定位辅助锚泊定位系统的研究都是基于上个世纪对动力定位系统和锚泊系统的研究应用基础上进行的[2]。上个世纪90年代末,荷兰MARIN水池的Johan等从理论上研究过二者混合定位系统,并做过水池试验,最终因为难以开展水下锚泊系统试验研究,没有进行完整的相关模型试验。同时,挪威科技大学也开展了一系列涉及动力定位辅助锚泊定位模型试验研究,但是重点是控制方式的研究。近几年,国内上海交通大学也对该混合定位方式进行了理论研究。
动力定位辅助锚泊混合定位下的平台运动是一个复杂的过程,很难像单纯地使用锚泊定位或者动力定位模式下那样,建立一个精确的模型,单纯用静态或者动态方法,或者用时域和频域分析方法来分析其控位能力[3-5]。
从上述动力定位和锚泊定位能力分析对比可以看出,在动力定位与锚泊定位对环境的抵抗作用中,锚泊抵抗的环境力的成分更多,包含了波频及全部低频,对稳态风、流及二阶波漂力抵抗作用二者几乎是相同的。
锚泊定位下平台的波频运动一般可与低频运动分开计算。在波频运动分析中,由于平台的纵荡、横荡和首摇运动的固有周期远大于波浪周期,一般可不考虑系泊系统质量及弹性对波频运动的影响。在低频运动分析中,一般只考虑系泊平台的低频纵荡、横荡和首摇运动。系泊平台的低频运动为集中在系泊平台固有频率附近的极度狭带的响应。运动幅值取决于系泊系统的刚度和阻尼[6]。
如果动力定位通过试验或由厂家可以提交出其刚度和阻尼系数(动力定位系统的控制品质),同样也可以用与锚泊分析类似的方式进行分析,这样就简化了整个分析过程。通过试验可以得出动力定位控位能力的计算公式为

式(1)中等号右边第二项与第三项相位差为90°。
另外,由统计学和圆周运动公式可知

推荐混合定位的分析流程见图4。

图4 混合定位分析流程
4 计算实例
设计位于北海Haltenbanken海区作业的某半潜钻井平台的相关参数如下。坐标系采用常规的北东坐标系。
6个65 t全回转推进器的布置位置见表1,8根锚链布置位置见表2,选取的锚链的特性见表3,挪威海事局对锚链动态安全系数的要求见表4,依据挪威船级社规范要求,对工作在北海海区使用锚泊定位的半潜平台需满足100年一遇风和浪的工况(自存),对应的海况参数见表5,所配置的动力定位,即系统厂家提供的动力定位系统的阻尼和刚度系数见表6。

表1 某半潜钻井平台推进器位置 m

表2 锚链布置位置

表3 所选用锚链的特性

表4 挪威海事局对锚链安全系数的要求

表5 挪威北海Haltenbanken海区百年一遇工况

表6 DP厂家提供的DP特性
依据试验得出的环境力系数,所计算出平台在180°方向所受环境力的大小及计算流程见表7。

表7 180°方向平台所受环境力计算
在SESAM MIMOSA模块下频域分析可知平台横向标准偏差为7.9 m,跨零周期为165.4 s;纵向标准偏差为1.09 m,跨零周期为204.49 s;分别带入式(2)和(1)中,结合表6,求得平台在北东坐标系下180°方向动力定位系统最大需要提供推力为3 617 kN,小于3 635 kN,满足要求。
依据上述流程,可以依次算出在完整自存工况下其他角度动力定位的控位能力及锚泊分析。
见图5和图6。

图5 混合定位模式及完整自存工况下DP控位能力分析

图6 混合定位模式及完整自存工况下锚泊安全系数
5 结束语
半潜平台在动力定位辅助锚泊定位模式下的分析是一个复杂的过程。通过对比分析两种定位方式在定位过程中所抵抗的环境载荷成分的不同,把平台作业中所受的环境载荷分为静态力和动态力,静态力主要由动力定位来控制,动态力主要由锚泊系统来控制,基于此思想计算校核二者的定位能力。本文仅是从理论上给出分析,把环境载荷分开考虑是一种简化和理想的过程,实际控制过程远没这么简单,需要专业软件建模分析和水池试验等方法进行混合定位模式控位能力的真实分析。
[1]孙 攀.深水半潜平台锚泊辅助动力定位系统功率消耗研究[J].海洋工程,2010,28(3):24-30.
[2]杨 欢.锚泊辅助动力定位研究与进展[J].试验室研究与探索,2012,30(4):88-92.
[3]张 峰.锚泊辅助动力定位系统单缆失效影响研究[J].海洋工程,2012,30(3):29-34.
[4]周 利.船舶动力定位系统与锚泊辅助动力定位系统的时域模拟比较[J].船海工程,2009,38(4):154-157.
[5]PETER J.Design of automatic thruster assisted positioning mooring system for ships[J].Modeling,identification and comtrol,1998,19(2):61-75.
[6]JENMAN C.mixing dynamic positioning and moorings[C]∥Dynamic Positioning Conference,2005.
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
舰船科学技术(2022年20期)2022-11-28
船海工程(2021年6期)2021-12-17
船海工程(2020年3期)2020-07-31
船舶标准化工程师(2020年1期)2020-06-12
舰船科学技术(2020年3期)2020-04-22
船海工程(2019年3期)2019-07-03
船舶与海洋工程(2018年4期)2018-09-10
舰船科学技术(2018年8期)2018-09-02
科技经济市场(2017年2期)2017-05-22
