校飞机载实时监控系统的设计与实现❋
2013-06-27 05:50周江潘高峰马楠
电讯技术 2013年7期
周江,潘高峰❋❋,马楠
(中国卫星海上测控部飞行器海上测量与控制联合实验室,江苏江阴214431)
校飞机载实时监控系统的设计与实现❋
周江,潘高峰❋❋,马楠
(中国卫星海上测控部飞行器海上测量与控制联合实验室,江苏江阴214431)
基于现行方案的比较,按照合作目标特性设计了相应的采控模块,实现了各类型合作目标接口的标准化。各模块采用Modbus协议级联在RS485总线上,通过数传电台构成船-机回路,实现船载端的实时监控。系统测试表明,所设计的系统完全满足使用要求。
测控设备;机载实时监控系统;校飞;采控模块;Modbus
1 引言
为对船载新研或新改造测控设备的动态跟踪性能、系统协调性、测量精度进行验证,目前必需的技术手段就是校飞,即用携带合作目标(应答机、信标机及光源等)的飞机,在预定航路上按照一定的飞行工况进行飞行,通过对被鉴定设备与标准设备跟踪参数的数据处理,评价被鉴定设备的动态跟踪性能和测量精度[1]。由于各测量船配备的测控设备不同,且测控设备型号众多,设备状态、工作模式也不尽相同,如何实现船载端对机上合作目标的有效监控,从而提高工作效率、节省校飞架次,并可根据各测量船情况进行合作目标的自由组合,成为亟待解决的课题。
本文针对这一需求,综合考虑现有设备状态和校飞需求,按照合作目标接口标准化的总体思路,设计了一套机载实时监控系统。系统搭建与测试表明,系统设计方法合理有效,船载端对机上合作目标的状态采集与控制可靠,满足了装机环境和校飞高效监控需要。
2 方案比较
2.1设备现状
船载测控设备主要包括S频段统一测控系统设备、C频段统一测控系统设备、雷达系统设备、卫通以及经纬仪等,一些测控设备又分为多种工作模式,比如S频段统一测控系统设备就包括标准TT&C工作模式、扩频工作模式、FM工作模式等[2],因此对应测控设备的机上合作目标包括适应船载测控设备各种工作模式的应答机、信标机等。而这些合作目标特性主要分为3种,一是仅仅提供模拟接口,简称模拟设备;二是提供串行RS232接口,简称数字设备;三是提供RS485总线接口,简称总线设备。
2.2 方案设计
本系统主要完成机上合作目标的状态采集、参数控制、开关机等,根据设备现状可以采用的方案有如下两种。
(1)方案一
采用研华等厂家生产的、支持Modbus协议的亚当功能模块,包括A/D模块、I/O模块、协议转换模块等,它的优点是系统利于集成,对于本系统而言主要缺点是无法解决扩展性和产品体积带来的问题,无法最优化地实现合作目标的自由组合。
(2)方案二
采用通用、统一的设备接口标准,针对合作目标特性设计相应的功能模块,它的优点是功能模块与合作目标作为一个整体级联在总线上,既可实现合作目标的有效控制,又可实现合作目标的自由组合。
根据设备现状和校飞任务需求,需要将这些接口形式各异的合作目标归一化为统一接口形式,以便于上位机进行统一管理。针对测量船配置的测控设备不同,通过合作目标接口的标准化即可实现自由组合,可以适应不同的任务需求,本文使用第二种方案进行系统设计。
3 系统设计
通过设计实现特定功能的采集和控制模块(采控模块),完成了新老合作目标的状态采集和有效控制,各采控模块采用工业现场总线技术实现了级联,船载端与机上监控微机通过数传电台完构成船-机回路,满足了系统设计的功能要求,原理框图如图1所示。
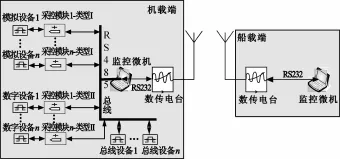
图1 机载实时监控系统原理框图Fig.1 Principle diagram of the real-time monitoring system
根据机上合作目标特性采用两种采控模块,类型Ⅰ是对模拟设备进行参数采集和开/关控制,类型Ⅱ是对数字设备进行协议转换和开/关控制,两种类型的对外接口均是RS485,接口协议采用标准的Modbus协议,与总线设备一起受控于机上监控微机。机上监控微机根据设备地址对所有级联在总线上的设备进行状态轮询,得到所需的参数数据,按照预定的帧格式,通过RS232发给机上数传电台;船载数传电台接收到数据,按照帧格式解析出数据,用于航迹显示和船指挥员判断。如需调整设备开/关等操作,船指挥员通过船载监控微机按照帧格式发出指令,机上监控微机收到指令后解析,按照Modbus
协议进行相关设备控制。
为保证系统的可靠性和操控性,设计时采用了基于Modbus协议的工业现场总线技术。Modbus协议是工业现场应用非常广泛的一种标准,通信采用主从结构,从设备只响应主设备发给自己的命令,从而实现了设备网络传输和确保了通信的可靠性,一般采用两种传输模式:ASCII或RTU,本文使用RTU
模式[3];同时,采用RS485总线进一步保证了系统信息传输的可靠性。
从图1可知,整个系统设计的关键技术就是两种类型采控模块的设计,包括硬件电路设计与软件设计。
3.1 硬件电路设计
由于本系统所设计的采控模块并不复杂,在硬件电路设计时,选用了积木式电路设计方法,将已知的单元功能电路进行合理地拼接,就像搭积木一样,整合实现模块功能。它减少了繁杂的计算,大大缩短了设计时间,只需在调试电路时对一些元件参数做少许修改,就可完成整个电路设计[4]。所谓合理地拼接,是指要考虑前后单元电路的输入输出阻抗、输入输出电平及电源电压等的匹配。
(1)类型Ⅰ采控模块设计
类型Ⅰ采控模块的功能是采集模拟设备的状态参数、控制模拟设备的开/关机以及参数的上报,其原理框图如图2所示。其主处理器选用STC89C52,它是一种低功耗、高性能微控制器,具有8 kB Flash、512 B RAM、32位I/O口、全双工串行口,最高运作频率35 MHz,与其最小电路形成通用的“主木头”。根据合作目标的接口电气性能,选用PCF8951对模拟信号进行采集。PCF8591是一个单片集成、单独供电、低功耗、8 b CMOS数据获取器件,具有4个模拟输入、1个模拟输出和1个串行I2C总线接口,与其外围电路形成通用的“A/D采集木头”。对于合作目标的开/关控制,采用松下的SRD继电器,驱动选用ULN2003,组合形成通用的“继电器木头”。MAX485芯片用于完成RS485串口的配置,与其外围电路形成通用的“RS485木头”。这些“木头”按照约定接口组合在一起,就完成了类型Ⅰ采控模块设计。

图2 类型Ⅰ采控模块原理图Fig.2 TypeⅠacquisition control module principle diagram
(2)类型Ⅱ采控模块设计
类型Ⅱ采控模块的功能是控制数字设备的开/关机、协议转换后的参数上报,其原理框图如图3所示。其主处理器选用C8051F020,它是Cygnal出品的一种混合信号系统级单片机,含有64 kB片内Flash程序存储器,4 352 B的RAM、8个I/O端口、5个16位通用定时器、两个UART串行接口等部分,这里主要是利用其双UART接口实现与合作目标的RS232通信和上位机的RS485通信,与其最小电路形成通用的“主木头”。MAX485和MAX232芯片用于完成串口配置,形成通用的“RS485木头”和“RS232木头”。与“继电器木头”组合在一起,就完成了类型Ⅱ采控模块设计。

图3 类型Ⅱ采控模块原理图Fig.3 TypeⅡacquisition control module principle diagram
3.2 软件设计
(1)模块软件设计
采控模块类型Ⅰ和类型Ⅱ软件设计均采用模块化设计思路,类型Ⅰ的软件功能包括:通过I2C总线采集A/D芯片状态数据并存储至内部寄存器,接收RS485总线指令,或发送合作目标状态数据,或通过I/O控制实现合作目标的开关机操作,其软件流程如图4所示;类型Ⅱ的软件功能包括:定时发送RS232命令采集合作目标状态参数并存储至内部寄存器,接收RS485总线指令,或发送合作目标状态数据,或通过I/O控制实现合作目标的开关机操作设定,其软件流程与类型Ⅰ基本相似,只是将采集状态部分变化为启动定时器,发RS232串口命令,得到的状态数据存入内部存寄存器。
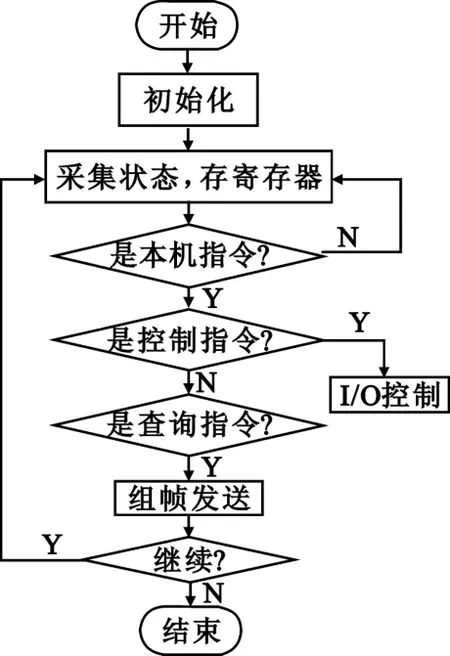
图4 类型Ⅰ采控模块流程图Fig.4 Flow chart of typeⅠacquisition control module
本文以类型Ⅰ软件开发为例,进行软件设计说明,模块主要包括采集模块、I/O控制模块和串口模块,采集模块采用I2C总线进行通信。I2C总线是一种高性能芯片间串行同步传输总线,仅需串行数据线SDA和串行时钟线SCL就实现了双工同步数据传输,它集成在STC89C52内部,极大缩短了设计时间[5]。I/O控制模块是根据指令进行STC89C52单片机I/O端口的高低电平变化。串口模块是根据指令按照标准的Modbus协议格式进行数据传输或I/O控制,如查询合作目标状态的帧格式如下:
上位机发送命令:
[设备地址][命令号][00][00][00][03][CRC低8位][CRC高8位]
模块终端回复:
[设备地址][功能号][数据长度][数据1][数据2][数据3][CRC低8位][CRC高8位]
(2)上位机软件设计
机上监控微机软件的功能是按照预定的帧结构发送轮询命令,得到各个合作目标的状态数据,并通过串口发给数传电台;当接收到串口指令后,对指令进行解析,按照设备地址发送相关命令。船载端微机软件的功能是串口接收机上数传电台发出的数据,对数据进行解析,进行航迹显示、状态了解以及数据处理等工作,船指挥员可以实时发送串口控制指令,通过数传电台发出,从而构成了天地回路,实现船载端对机上合作目标的监控。
4 系统测试与验证
为验证所建系统的性能、功能,笔者设计了采控模块,与相应的模拟设备、数字设备和总线设备,按照图1所示搭建了系统测试环境。测试项目包括天地间信息接口的一致性、天地间控制/采集命令的收发准确性和实时性、船载端监控软件的功能、机载端监控软件功能、采控模块的功能等,船载端监控界面如图5所示。测试表明,信息接口正确,数据传输可靠,控制执行及时稳定,采控模块功能正常,各项功能、指标满足设计要求。

图5 船载端监控界面Fig.5 TT&C ship software run interface
5 结束语
根据工作实际需要,通过对系统设计目标、控制对象和现有设备状况的综合分析,开发了基于工业现场总线的机上监控系统,最优化地实现了对机上合作目标的实时监控和自由组合,满足了船载端实时监控需求。本方案的优点是成本低,可操控性强,可靠性高,可扩展性好。系统测试表明,方案设计合理,各项功能、指标满足实际任务需要。本文对新老设备并存下,通过接口标准化实现接口统一,以及采用硬件积木式设计方法对其他类似开发具有一定的借鉴意义。
[1]钟德安.航天测量船测控通信设备标校与校飞技术[M].北京:国防工业出版社,2009. ZHONG De-an.TT&C measurement and control communication equipment of TT&C Ship calibration and the flighting fly technology[M].Beijing:National Defense Industry Press,2009.(in Chinese)
[2]江文达.航天测量船[M].北京:国防工业出版社,2002. JIANG Wen-da.TT&C Ship[M].Beijing:National Defense Industry Press,2002.(in Chinese)
[3]潘高峰,王珏.基于Modbus协议的校飞集中监控系统[J].遥测遥控,2008,29(6):59-61. PAN Gao-feng,WANG Jue.The Flighting Monitoring System Based on the Modbus[J].Journal of Telemetry,Tracking and Command,2008,29(6):59-61.(in Chinese)
[4]孙肖子.电子设计指南[M].北京:高等教育出版社,2010. SUN Xiao-zi.Electronic design guide[M].Beijing:Higher Education Press,2010.(in Chinese)
[5]郑峰.51单片机典型应用开发范例大全[M].北京:中国铁道出版社,2011. ZHENG Feng.51 microcomputer development example of the typical application[M].Beijing:China Railway Press,2011.(in Chinese)
ZHOU Jiang was born in Nantong,Jiangsu Province,in 1974.He received the M.S.degree in 2002.He is now a senior engineer.His research concerns aerospace TT&C technology.
潘高峰(1972—),男,辽宁锦州人,1995年获学士学位,现为高级工程师,主要从事智能仪器、自动测试系统方面的研究;
PAN Gao-feng was born in Jinzhou,Liaoning Province,in 1972.He received the B.S.degree in 1995.He is now a senior engineer.His research concerns intelligent instrument and ATS.
Email:pgfzhy@163.com
马楠(1976—),女,辽宁沈阳人,1999年获学士学位,现为工程师,主要从事航天测控总体技术方面研究。
MA Nan was born in Shenyang,Liaoning Province,in 1976. She received the B.S.degree in 1999.She is now an engineer.Her research concerns aerospace TT&C technology.
Design and Implementation of an Airborne Realtime Monitoring System for Calibration Flying
ZHOU Jiang,PAN Gao-feng,MA Nan
(Joint Laboratory of Ocean-based Flight Vehicle Measurement and Control,China Satellite Maritime Tracking and Control Department,Jiangyin 214431,China)
Under the current plans,acquisition&control module is designed based on the cooperative target in calibration flying tasks and standardization for different interfaces is realized.Each module is connected by RS485 based on Modbus.In the ship-airplane circuit by data radio,real-time monitoring comes true on ships. Tests show that the designed system satisfies the practical application.
TT&C equipment;airborne real-time monitoring system;calibration flying;acquisition&control module;Modbus
date:2013-01-22;Revised date:2013-04-15
❋❋通讯作者:pgfzhy@163.comCorresponding author:pgfzhy@163.com
V556;TP273
A
1001-893X(2013)07-0845-04

周江(1974—),男,江苏南通人,2002年获硕士学位,现为高级工程师,主要从事航天测控总体技术方面研究;
10.3969/j.issn.1001-893x.2013.07.004
2013-01-22;
2013-04-15
猜你喜欢
疯狂英语·新读写(2021年10期)2021-12-07
新世纪智能(英语备考)(2019年4期)2019-06-26
铁道通信信号(2019年11期)2019-05-21
测控技术(2018年2期)2018-12-09
测控技术(2018年6期)2018-11-25
测控技术(2018年8期)2018-11-25
山东工业技术(2016年15期)2016-12-01
山东工业技术(2016年15期)2016-12-01
太空探索(2016年12期)2016-07-18
空间控制技术与应用(2015年2期)2015-06-05