声呐拖体拖曳稳定性研究
2013-07-05 16:31洪有财陈小星龚凯朱城海
声学与电子工程 2013年2期
洪有财 陈小星 龚凯 朱城海
(第七一五研究所,杭州,310012)
声呐拖体拖曳稳定性研究
洪有财 陈小星 龚凯 朱城海
(第七一五研究所,杭州,310012)
对拖体静止悬吊状态进行受力分析,推导出计算拖体静姿态角和静恢复力矩的公式;分析水动力稳定性;讨论获得相关水动力参数的方法和途径。
拖曳稳定性;声呐;水动力参数;拖体静姿态角;拖体静恢复力矩
主被动拖曳线列阵声呐具有可通过变深获得最佳信道、主动工作频率低、探测距离远等优点,是探测安静型潜艇的有效手段,目前已在各国海军中普遍使用。该类声呐都拖曳一个主动发射探测的低频声源,由于发射换能器基阵本身不具有导流特性和拖曳稳定性,因此需要将其安装到具有低阻力、拖曳稳定的声呐拖体中,通过拖缆拖曳及收放使用。声呐拖体应同时具备两个基本要求,一是满足透声要求,二是满足拖曳稳定性要求。由于声呐拖体相对主动发射阵声中心不具有中心对称性,及拖体内部结构件的阻挡,与裸发射阵相比,发射时声场有所变化,如发射指向性变化、发送响应降低等。拖体的拖曳稳定性不仅仅影响声性能,还影响拖曳声呐的安全性。如果拖体拖曳时在水中不稳定,则会大幅度左右舷漂移,或大幅度的深浅变化,很难在某个位置稳定下来,作用在拖体上的水动力剧烈变化,导致拖体周围产生大量气泡,也影响拖体声源的声性能。要使拖体具有良好的拖曳稳定性,它先需要具有良好静姿态和尽可能大的静恢复力矩,然后再具有拖曳状态时的水动力稳定性。静恢复力矩对拖曳稳定性有着重要的影响。
1 静姿态及静恢复力矩分析
为了满足声呐拖体高速拖曳的稳定性和良好姿态,拖体一般是左右舷对称的,拖体(安装发射阵、水密舱等内装件之后)在水中的静姿态一般要求横倾角φ≤2°,纵倾角α≤5°。因此拖体设计完后,需要计算重力、重心、浮力、浮心[1],及其静姿态角,如果静姿态角不满足要求,需通过增加重块或浮块来调节。
拖体在水中静止悬吊时受3个力作用,一是重力G,二是浮力F,三是作用于拖点的拖力T。拖体处于零横倾、零俯仰时,以拖点为坐标原点[2],指向拖体首部为χ方向,指向拖体右舷为y方向,垂直向下为z方向,建立固定坐标系。通过计算可得到重心G坐标(a,b,c),浮心F坐标(d,e,f)。投影到中纵剖面内拖体的静态受力如图1所示。则重心到拖点的距离,浮心到拖点的距离如果拖体纵倾角为0,则由力和力矩平衡可知[3]:

如果拖体在水中静止时纵倾角不为0,抬首α角度后才达到力矩平衡,则浮心F运动到F′,重心G运动到G′,由力矩平衡可知:

通过式(3)可求得:


图1 在纵剖面投影的受力分析
如果拖体在水中静止时纵倾角为0,给一个初始扰动使其抬首α′角,扰动消除后产生的静恢复力矩L=F×r2sin(φ−α′)−G×r1sin(θ−α′)。经推导可得:

从后往前投影到横剖面内拖体的静态受力如图2所示。则重心到拖点的距离,浮心到拖点的距离tanγ=e/f。
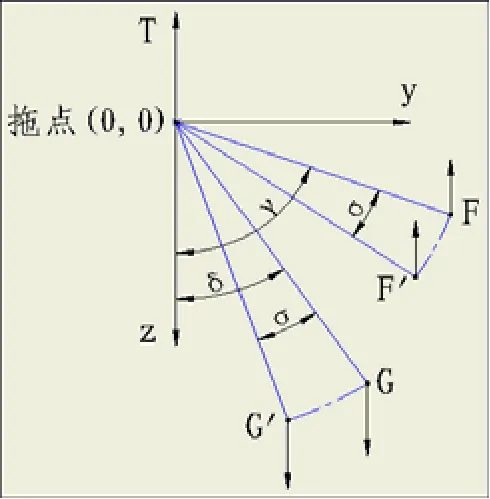
图2 在横剖面投影的受力分析
如果拖体在水中静止时横倾角不为0,右倾σ角度后才达到力矩平衡,则浮心F运动到F′,重心G运动到G′,由力矩平衡可知:

通过式(5)可求得

如果拖体在水中静止时横倾角为0,给一个初始扰动使其右倾σ′角,扰动消除后产生的静恢复力矩

经推导可得:

由式(4)、(6)可知,拖体重心越低、浮心越高、净重越大,则恢复力矩越大,静止悬吊时稳定性越高。静恢复力矩包括纵倾静恢复力矩和横倾静恢复力矩,横倾静恢复力矩对拖体拖曳稳定性尤为重要。
2 水动力稳定性分析
参照潜艇平面运动假设,将拖体的空间运动分解成两个平面运动。一个是不改变深度、主要研究航向保持与改变的水平面运动;一个是不改变航向、主要研究深度保持与改变的垂直面运动。拖体拖曳运动时,在垂直面内受到静态力及与速度有关的水动力作用。如果因受扰动使拖体产生额外的姿态角,静恢复力矩依然起稳定拖体的作用,这时拖体能否稳定还要看拖体水动力力矩的作用。如果水动力产生的是颠覆力矩,而且大于静恢复力矩,则拖体肯定是不稳定的。由于水动力及其产生的力矩随速度提高而迅速提高,而静恢复力矩是不变的,当速度足够大时水动力产生的力矩肯定会大于静恢复力矩。因此,要使拖体是拖曳稳定的,必须使水动力产生恢复力矩。
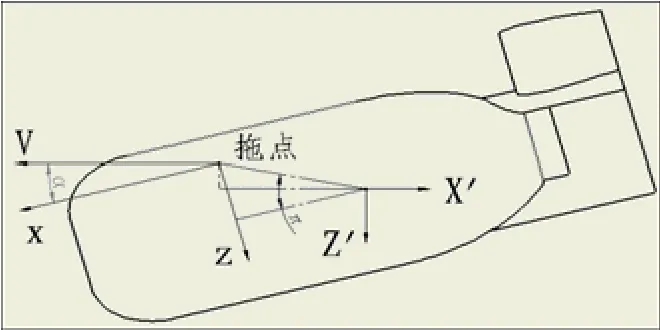
图3 垂直面内水动力受力分析(本文中,π为角度变量)
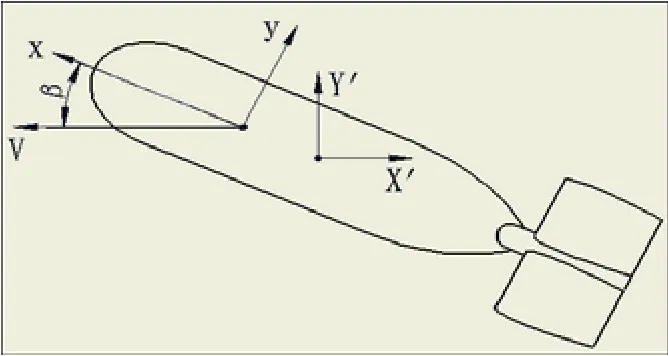
图4 水平面内水动力受力分析
为便于受力分析,在拖体处于零横倾、零俯仰、零偏航时,我们建立两个坐标系,一个是以重心为坐标原点o′,指向拖体尾部为χ′方向,指向拖体左舷为y′方向,垂直向下为z′方向,且固连于地球的定坐标系o′−χ′y′z′。一个是以拖点为坐标原点o,指向拖体首部为χ方向,指向拖体右舷为y方向,垂直向下为z方向,且固连于拖体的动坐标系o−χyz。水动力在坐标系o′−χ′y′z′上力的投影分别为X′、Y′、Z′,力矩的投影分别为K′、M′、N′。垂直面内拖体水动力分析如图3所示。假设拖体受扰动后产生埋首角α(抬首为正,埋首为负),则拖体受到的水动力有与速度V方向相反的阻力X′和与速度方向垂直的升力Z′;假设拖体水动力中心在o−χyz坐标系中的坐标为(g,h,i),则水动力中心到拖点距离为水动力对拖点产生的俯仰力矩:

由式(7)可知,如果水动力中心在拖点之后,则升力Z′产生的力矩力图使扰动引起的埋首角α减小,即升力产生了纵倾恢复力矩。反之,如果水动力中心在拖点之前,则升力Z′产生的力矩力图使扰动引起的埋首角α增大。由于拖体是流线型的,阻力X′较小;当纵倾角为0时,水动力中心在拖点下方,而且随着纵倾角α的增大,水动力中心往上移,阻力X′对拖点的力臂r5×sin(π−α)迅速减小,由阻力产生的力矩也迅速减小。当纵倾角α增大时,升力Z′增大,升力对拖点的力臂r5×cos(π−α)也增大。因此,只要水动力中心在拖点之后,必存在一个临界纵倾角ε,使得当纵倾埋首角α大于ε时,总水动力力矩M大于0,为纵倾恢复力矩。ε为固有拖曳角,不同速度对应的ε不同,这时拖体是拖曳稳定的。但一般要求ε≤5º,否则阻力会增长很快。如果拖体初始姿态为抬首,阻力X′产生的力矩也是恢复力矩。
水平面内拖体水动力分析如图4所示。假设拖体受扰动后产生偏航角β(右偏航为正,左偏航为负),则拖体受到的水动力有与速度V方向相反的阻力X′和与速度方向垂直的偏航力Y′。水动力对拖点产生的力矩:

由式(8)可知,如果水动力中心在拖点之后,则升力Y′和阻力X′产生的力矩都会使扰动引起的偏航角β减小,即产生了偏航恢复力矩,拖体是拖曳稳定的。反之,如果水动力中心在拖点之前,则升力Y′和阻力X′产生的力矩会使扰动引起的偏航角β增大,拖体是拖曳不稳定的。
由以上分析可知,只要水动力中心在拖点之后,拖体的纵倾、航向就是稳定的,而且还会产生水动力纵倾恢复力矩。水动力中心在拖点之后是拖体横倾稳定的必要条件,但拖曳时横倾振荡角的大小还与横倾静恢复力矩有关。
3 拖体水动力中心的计算
拖体设计时需要综合考虑声性能、尺寸、重量及拖曳稳定性,初步设计完成后必须确定拖点位置,计算拖体重力、浮力及重心、浮心、水动力中心的位置。获得拖体水动力中心位置有三种方法,一是通过拖体模型水动力试验来获得,这种方法最直接,可信度也最高,二是利用经验公式分析计算,三是利用流体动力软件进行数值计算。
3.1 利用经验公式分析计算
利用经验公式分析计算,需要简化假设条件及类似拖体水动力参数,这种方法比较廉价,但精度不高。拖体由主体和尾翼组成,主体用于安装主动发射探测声源、水密仓等,尾翼用于稳定拖体。将主体看作厚翼,计算侧向投影外形的平均弦长、展弦比,水平投影外形的平均弦长、展弦比,其升力系数取相应薄翼的A倍,A是大于零小于1的系数,这个系数要凭经验及类似拖体的水动力参数来取。计算尾翼水动力时,其升力系数取相应薄翼的B倍,该系数主要考虑了主体与尾翼组合的影响。薄翼的升力可采用布拉果小展弦比矩形机翼公式来近似计算[4]:

其中V表示速度,ρ是海水密度,S表示翼投影面积,α表示攻角。水动力在动坐标系o−χyz上力的投影分别为X、Y、Z,力矩的投影分别为K、M、N。在垂直面水动力计算时,需计算出产生微小纵倾角α时由主体和尾翼共同产生的纵向力X、垂向力Z、俯仰力矩M。如图3所示,则:

其中lα、hα是垂直面水动力中心在χoz坐标系中χ、z的坐标值,hα可取为拖体主体形心的高度。则

水平面水动力中心计算时,需要计算出产生微小偏航角β时由主体、尾翼共同产生的纵向力X、偏航力Y、偏航力矩N。如图4所示,则:
其中lβ是水动力中心在χoz坐标系中χ的坐标值,lβ=N/Y。
3.2 利用solidworks软件计算
Solidworks软件具有强大的实体设计功能和工程分析能力,利用其所设计的实体可以直接进行流体力学计算[5]。利用该软件进行流体力学计算时,先进行拖体实体的创建,计算出拖体零横倾、零偏航时的阻力X′、升力Z′、俯仰力矩M′。然后将拖体偏航10°,计算出阻力X′、侧向力Y′、偏航力矩N′。然后将拖体仅抬首10°,计算出阻力X′、升力Z′、俯仰力矩M′。建立上述三种状态下的力矩平衡方程,就可以计算出拖体水平面水动力中心的纵向位置及垂直面水动力中心的纵向位置。
利用该软件可进行多个偏航角和俯仰角度的流体力学计算,以研究拖体的非线性;而且还可计算拖体同时具有偏航、俯仰、横倾时的水动力特性。利用该软件计算拖体水动力稳定性最简便的方法,就是使计算域坐标原点与拖点重合,通过软件计算偏航力矩、俯仰力矩,并通过分析偏航力矩、俯仰力矩的作用来判断拖体水动力中心是否在拖点之后及拖曳稳定性,而不用计算水动力中心的绝对位置。
4 结论
声呐拖体的稳定性关乎声呐使用的安全问题,它与船舶稳定性有所差别,不同工程对拖体的姿态要求也不一样,因此需要认真研究。但只要做好静稳定性和水动力稳定性分析,就可以获得良好的拖曳姿态。
[1] 易杏甫, 曹海林. 新体系结构的拖曳体[J]. 声学与电子工程, 2001(3):27-32.
[2] 袁毅之, 徐一中, 蔡丽华. 带翼声呐拖体的稳定性问题及三点拖曳方式[J]. 海洋工程,1984(2): 48-57.
[3] 顾振福, 霍国正, 康炳坤, 等. 关于变深声呐(VDS)拖缆拖体系统漂移的研究[J]. 海洋工程, 1997, 15(1).
[4] 施生达. 潜艇操纵性[M]. 北京: 国防工业出版社, 1995.
[5] 吴高阳, 任国全. Solidworks 2010有限元、虚拟样机与流场分析从入门到精通[M]. 北京: 机械工业出版社, 2011.
猜你喜欢
中学生数理化·八年级物理人教版(2022年9期)2022-10-24
科学大众(2021年19期)2021-10-14
中国临床医学影像杂志(2021年6期)2021-08-14
北京汽车(2021年3期)2021-07-17
装备制造技术(2020年1期)2020-12-25
海洋信息技术与应用(2020年3期)2020-08-24
空间科学学报(2020年4期)2020-04-22
小学科学(学生版)(2019年10期)2019-11-16
北京航空航天大学学报(2016年3期)2016-02-27
沈阳航空航天大学学报(2014年5期)2014-08-29