作动系统健康状况对飞行安全影响的评估方法
2013-07-19 08:15谢文俊
计算机工程与应用 2013年15期
谢文俊,齐 蓉,肖 蕾
1.西北工业大学 自动化学院,西安 710072
2.空军工程大学 工程学院,西安 710038
3.西安卫星测控中心,西安 710043
作动系统健康状况对飞行安全影响的评估方法
谢文俊1,2,齐 蓉1,肖 蕾3
1.西北工业大学 自动化学院,西安 710072
2.空军工程大学 工程学院,西安 710038
3.西安卫星测控中心,西安 710043
1 引言
作战飞机的飞行安全性与飞行控制系统的可靠性密切相关。虽然飞行控制系统采用多余度设计技术,但往往是对控制系统的回路和控制计算机采用余度备份,而飞控系统的执行机构核心部件之一——机电作动系统,由于空间位置少、供电难和超重等原因,余度设置通常比较少,机电作动系统的故障往往给战机带来的是难以克服的“硬伤”,关系到飞行安全的飞行控制系统的执行机构的一次故障可能会导致灾难性的后果。因此,必须对飞控系统实施有效的健康状态进行量化评估[1-4]。
机电作动系统的健康状态是一个变化过程,它的运行状态可以分为四种情况:即正常状态、隐性异常状态、预防维修状态和失效状态。本文基于概率理论和极值理论对机电作动系统的健康状况进行评估,在此基础上通过对机电作动系统进行故障模式及影响分析,找出系统中最薄弱的环节,对其故障模式及分布规律进行仿真,综合研究机电作动系统故障对飞行安全的影响。
2 飞控系统飞行安全评估方法
飞行安全评估可以支持航空器寿命周期中各个阶段的安全管理。在航空器设计和研制阶段,可以评定系统的安全性是否符合有关标准和规定;在航空器使用阶段,可以考核既定的危险事件是否已经消除或控制在规定的可接受水平范围内;还可应用于评估新技术的使用对飞行安全的影响。
飞行安全的定量评估判据可以采用概率判据[5-6],概率评估判据可认为是对飞行风险提出的判断准则,根据风险的定义,可以采用等级标准、概率以及概率与经济损失三种方式,对风险进行判定。在此基础上,提出预防措施,有针对性地改进航空器设计,以防止同类事故的再次发生。
本文针对“机电作动系统-飞行控制系统”的故障模式,提出如图1所示的飞行安全评估方法。

图1 机电作动系统故障对飞行安全影响的评估方法
具体的实施步骤如下:
步骤1对机电作动系统进行故障模式及影响分析(Failure Mode and Effect Analysis,FMEA),找到系统中对飞行安全影响最大的薄弱环节。并对关键元件的故障模式和故障分布概率函数进行分析。
步骤2应用Monte-Carlo法进行故障随机性仿真,作为系统的不利因素输入,对飞行器运动进行仿真,得到决定性参数(迎角、过载等参数)的极值样本。
文献[3]建立了另外一个分析旋转物体动力学的方法,其思路是:(1)把旋转体的位移分为两部分,一部分是刚体运动(包括绕轴线的旋转)所引起的位移,另一部分是弹性变形所引起的位移;(2)弹性变形所引起的位移用物体不旋转状态下的振动模态进行叠加,而这些模态通过三维有限元分析得到。文献[3]在文献[4]中应用这个方法分析了旋转车轮与柔性轨道结构的非赫兹非稳态接触问题,在文献[5]中用来分析轨道曲线啸叫。文献[3]的方法需要用到三维有限元分析,尤其是不方便处理轮轨力沿车轮滚动圆的高速移动。
步骤3应用极值理论进行机电作动系统故障后驾驶员排除风险的概率定量评估。
步骤4求得机电作动系统的故障概率。
步骤5应用极值理论计算飞行安全概率。
缺乏文化背景知识是学生对英语思维方式感到陌生而无法正确组织学习过的语言知识的重要原因。“在跨文化交际中,第二语言学习者会发现,他们不仅外语交际能力受到了巨大的挑战,他们母语文化的交际规则和思维方式也常常行不通。他们的价值观念也常常受到误解或责难。”[2]英语学习者在交际中出现语法错误往往容易被谅解,但语用错误则可能被视为不礼貌不友好。对英语学习者而言,除了纠正语法错误,也要懂得用语得体,避免语用错误。无论是出于培养学生英语能力的考虑,还是出于提高学生综合素质的考虑,在英语教学中进行文化导入都是必要的。
3 飞行控制系统故障模型
若超出这个范围,则操纵面的输出值不再变化,因此有:

式中,x(t)∈Rn为状态向量;u(t)∈Rp为控制向量;y(t)∈Rm为观测向量(或传感器的输出向量);A∈Rn×n,B∈Rn×p,C∈Rm×n为相应维数的常数矩阵。
控制系统的故障一般反映在传感器故障、执行器故障、系统状态故障等几个方面[7-8]。机电作动系统故障属于执行器故障。为了便于研究,假设系统的传感器不发生故障,只有执行器发生故障,并考虑建模误差,用扰动表示,则故障系统模型可以用以下一般形式描述为:

宝宝说:“爸爸妈妈,请你们在帮我挑选东西前,好好查一查有关的安全标准,避免买来有安全隐患的物品,减少对我的伤害。”
定义1.3[14] 伪BCI-代数X的一个滤子F叫做X的一个反群滤子,如果(GF) (x → 1) → 1 ∈ F 或(x1)1 ∈ F ⟹ x ∈ F.
在飞行控制系统中,机电作动系统的主要功能是驱动舵面的偏转,因此广义上的机电作动系统,除了驱动电机、控制电路和机械传动装置,可以引申到舵面。
飞机机电作动系统的故障行为,会使控制系统的参数发生变化,从而影响系统的性能,通常情况下,飞机作动系统的故障主要体现在如下几个方面:
(1)由于机械传动装置的故障,造成操纵面的卡死,此时的故障模型为:
过去的半个多世纪,在‘创新’的名义下,小学数学标准被当作一项产品设计,任意改动,修饰.如今的小学数学充斥着不当的内容和方法,甚至许多错误;疮痍处处,面目全非.这是美加数学衰败的首要原因.自从小学引进了发现式数学,不但小学数学一落千丈,中学乃至大学的数学以及科学也受到影响.由于国民数学和科学基础太差,美国有很多工作岗位找不到合适的员工.更有人指出,美国前些年的房贷危机是由于上至总统,下至普通民众数学能力的极大欠缺所造成的,不无道理.
令uiout为第i个操纵面的实际输出,uiin为第i个操纵面正常时的输出。第i个操纵面卡死的故障模式可描述为:

式中,ai为常数,i=1,2,…,p。
式中,E∈Rn×l为扰动的分配矩阵;d∈Rl为扰动向量。
在以上研究基础上,基于极值理论计算机电作动系统故障条件概率的基本步骤如下:
在实际控制系统中,操纵面的输出有一个限制范围,即

飞行控制系统主要由感知对象状态的传感器、实施数据处理和执行控制功能的计算机以及操纵舵面运动的伺服作动系统等分系统组成,所以飞行控制系统是包含有几十个部件的复杂系统。依据飞行控制系统的基本组成,经常把系统的故障类型分为传感器故障、飞行控制计算机故障、伺服作动系统故障以及控显装置故障等几部分。通常情况下,飞行控制系统可以用下面的状态空间模型描述:
从而看出2010年到2012年CPA的人数逐年递减,这是由于行业不景气导致的,在2013年合并后CPA的人数在不断增加。CPA作为会计师事务所的关键人才,其数量愈多就表明审计的专业性有了更好的保证,专业性提高有助于提高审计质量。在合并之后业务收入有了明显的提高,因为审计质量的提高使事务所的声誉提升,才有更多的客户,审计质量的提升使审计工作也获得更多的报酬,因此业务收入的提高也就体现了审计质量的提高。A合并后的综合排名一跃而上,说明了合并对审计质量的提高有积极影响,但2014年虽相比合并前的排名占有优势,但排名较2013年下降,这也就表明合并后审计质量的提升并不明显。
果园生草是现代农业一致公认、必不可少的科学作务方法。但相当一部分地区没有发挥果园生草的积极作用,反而使其变为草害,成为与果树争肥争水、诱发病虫的一大因素。在长江流域如四川、安徽、浙江、江西等地区,因生草诱发的黑斑病、炭疽病、褐斑病严重发生,对猕猴桃树体健康和商品产量带来直接冲击,要引起高度重视。北方猕猴桃产区依然沿用果园清耕、寸草不生的传统作务法,对土壤改良和果品品质也有直接不良影响,这种南北极端化的果园生草管理,要尽快改进。只有科学生草,计划生草,才能化害为利,发挥效能。南方控草、北方促草要成为今后猕猴桃园科学作务的基本方针。

如果满足:

此情况表示操纵面停留在输出的最大(或者最小)状态,就是所谓的作动器开路失效。
(2)由于驱动电机的故障,造成驱动功率有所下降,此时的故障模型为:
令uiout为第i个操纵面的实际输出,uiin为第i个操纵面正常时的输出。第i个操纵面卡死的故障模式可描述为:

式中,αi为常数,αi∈[0,1],i=1,2,…,p。

第i个操纵面松浮的故障模式为:

另外,与故障模式(2)相类似的一种故障模式为:
(4)操纵面损伤的故障模型:第i个操纵面损伤的故障模式可描述为式(9)。

式中,βi为损伤比例系数,i=1,2,…,p,且βi∈[0,1]。当βi=0时,相当于第i个操纵面在uiin(t)处卡死的故障;当βi=1时,即第i个操纵面处于正常情况。
上述机电作动系统的四种(包含操纵面损伤故障)故障行为,将影响系统的动态性能,所以,对于飞行控制系统,作动器故障的一般故障模式表示为:

式中,G∈Rn×q为作动器的故障分配矩阵;fa(t)∈Rq为作动器故障的函数。对于上述四种作动器故障,fa(t)将以不同的函数形式给出。
4 机电作动系统故障概率量化
农业是我国社会经济发展的基础,可以有效促进人们的生活水平和社会经济的发展,随着互联网技术的快速普及,互联网在很多方面都已经得到了广泛的应用,农业经济的发展需要抓住互联网这一契机,通过“互联网+”实现对农业资源的整合,促进农业经济的发展,本文就“互联网+”时代下推动农业经济发展进行了简要的分析探讨,希望通过本文能够给相关工作者带来帮助。
对故障特征的提取,实际是对各特征量异常信息的提取。如图2所示,该特征值在正常工作的情况下,其观测值应该位于之间,并且其可能出现的最大值和最小值分别为的特征值取值分别记为“超出正常工作范围上限”和“超出正常工作范围下限”。
根据现地背景中裸露石块光谱反射曲线,采用计算机全光谱配色,配制出高仿真岩石涂料。用于仿石制作时表面喷涂。模拟周围背景裸露山石的光学特征。制作过程中添加微胶囊相变材料和无机泡沫吸波材料,最终制作出的仿石器材如图11所示。
特征量异常信息与故障发生概率之间存在着一定的关系,为了便于计算和分析,常采用线性映射方法,设特征量Si采样值为Ui,特征量Si所对应的故障发生的概率为,如果特征量Si的采样值为Ui超出正常工作范围上限,并且满足



4.2 故障发生概率标准化处理

其中,f(·)和g(·)分别表示对第i个部件的当前故障发生概率及未来故障发生趋势的计算函数,可采用最值法等方法;hi表示对第i个部件未来故障发生趋势的重要程度权重。
※ 3个月以下的宝宝用退热药一定要咨询医生。阿司匹林、安乃近、尼美舒利副作用大,不是儿科使用的退热药。
对于部件故障发生概率Pi的分布问题,可以根据实验或经验方法获得。在实际应用的过程中,由于故障特征预测单元输出的是预测状态的时间序列信息,因此,可通过上节变换成Pi的采样序列,记为Pi(k),k=1,2,…,n,n表示采样序列的长度。
4.3 基于极值理论条件概率计算
通过对故障发生概率进行区间分离,即可完成对系统健康状态的量化分级。假设定义多个健康等级,则可以通过定义每一个故障的发生频率、风险概率的上限和下限来定义健康性指标。
4.1 故障发生概率提取
将机电作动系统的健康等级规定为五级:一级健康水平为事故出现概率小于或等于10-9;二级健康水平为故障出现概率大于10-9但小于或等于10-7;三级健康水平为故障出现概率大于10-7但小于或等于10-5;四级健康水平为故障出现概率大于10-5但小于或等于10-3;五级健康水平为故障出现概率大于10-3。该五级健康等级中的故障发生频率、故障概率与机电作动系统的健康状态之间的关系如图3所示。
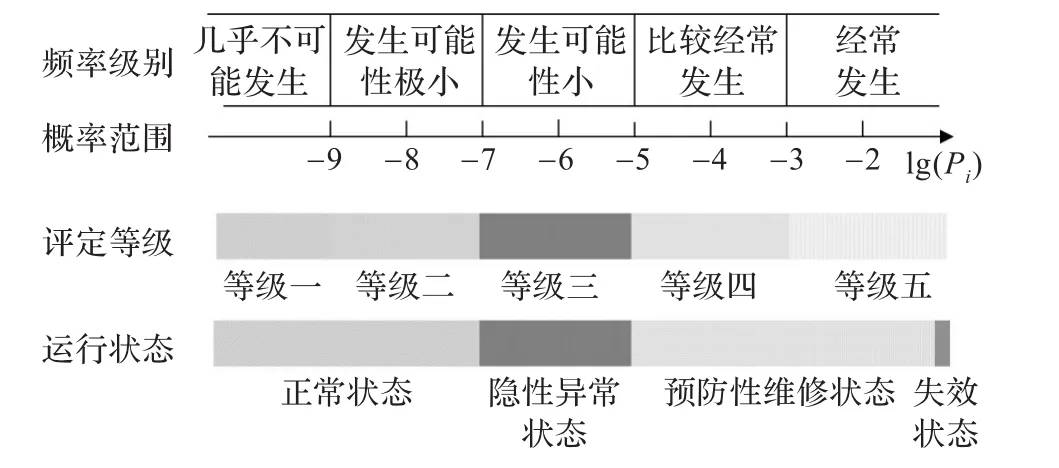
图3 机电作动系统健康状态量化等级及其与运行状态的对应关系
[2]I should bite my tongue off. (Goossens 1990:333)
步骤1确定样本容量n,获得样本的观察值Pi(1),Pi(2),…,Pi(n),分别表示第i个部件的故障发生概率的时间序列,序号i依次为1,2,…,k,表示第i个部件。

(3)由于机械传动装置的故障,造成操纵面松浮的故障,所谓的松浮是一种特殊的故障类型,表示操纵面不受控制,只是随着飞机飞行呈漂浮状态。此时的故障模型为:
步骤4将累积概率pi=i/n+1,i=1,2,…,n作为极值分布模型公式中分布函数G(x)对应的概率值,记z(i)=pi。

步骤6对所求出的模型作拟合优度检验,分析其拟和程度的优劣。
步骤7若通过拟合优度检验,则根据所求出的极值分布模型求解故障发生的概率P。

根据上述步骤可以得到Pi处于某一区间的概率P。P的含义表示为:发生某一等级故障的概率,如果概率越大,表示发生该等级的可能性越大,反之越小。
5 仿真实例
本章综合应用上述研究成果,计算由于机电作动系统故障引起的飞行安全综合概率。
假设飞行中副翼驱动舵机发生故障,飞行员在转弯时滚转动作过程中驱动舵机烧坏卡死,引起舵面卡于某一位置,造成了飞机的持续滚转。飞行员可以通过平尾的差动偏转来消除,但存在一定的滞后时间和随机概率。
瞬间卡死后假设机电作动系统出现故障后,其指示值是一个随机数,随机地分布在特定的限制范围内。一般情况下随机数的分布规律为均匀分布,其数学表达式为:

式中,xi为传感器的指示值,在(xmin,xmax)范围内;Rand(0,1)为(0,1)均匀分布随机数。
侧院十分狭窄,为一下沉式台地空间,因此以铺装为主,紧靠建筑一侧布置低矮花灌木,靠围墙一侧则贴墙种植竹丛,同时地形设计由建筑墙向侧庭中央倾斜,避免建筑墙基积水.这样侧院既可作为通道,也可作为休息场所观赏景物,实现了侧院的物尽其用.
机电作动系统故障的概率密度经Monte-Carlo得到的故障样本如图4所示。

图4 故障样本直方图
建立人-机闭环的SIMULINK仿真模型,进行仿真后得到决定性参数为滚转角速度ωx,采用Monte Carlo法对人-机闭环系统的动态特性进行仿真,得到ωx的50个样本极值。
将滚转角速度的极限值设定为ωxmax=90°/s,采用基于极值分布的最小二乘法估计分布参数,以累积概率的负双对数函数为横坐标,ωx的样本极值为纵坐标,得到样本极值分布如图5所示。其中,“+”表示横向通道滚转角速度传感器故障后的样本极值。
地热能大多埋藏到地下2000~5000 m,地热开发往往在比石油和天然气开发更加复杂的地质环境中进行,要面对恶劣的高温高压条件,所以对科学技术提出了很高的要求。在地热开发过程中,钻探工程费用可能占整个项目投资的一半以上,因此提升地热钻井效率尤为重要。
将滚转角速度的最大可能值设定为Max=90°/s,基于极值理论计算得到故障后驾驶员排除风险的概率为Q2= 0.035,样本极值分布如图6所示。

图5 样本极值分布图

图6 样本极值分布图
根据上述方法计算得到机电作动系统出现该故障的概率为6×10-3个/h,则该飞机1个飞行小时内的综合风险概率为2.1×10-4个/h。若以10-6个/h为该飞机的最低适航标准,则该飞机的机电作动系统发生该故障的最大概率不得超过2.85×10-5个/h。
6 结束语
本文研究了机电作动系统的健康状况对飞行安全的影响。在已知机电作动系统故障概率分布的前提下,综合机电作动系统故障模式及飞控系统故障模型,对飞行安全作出了合理的评估,并可利用该结论进行安全监控。
[1]孙瑞山,刘汉辉,张秀山,等.航空公司安全评估系统[J].中国民航学院学报,1999,17(3):45-48.
[2]刘金慰,姜斌.飞行控制系统健康监控技术研究与系统开发[J].科技通报,2011,27(5):32-37.
[3]王华伟,左洪福.航空公司安全评估研究[J].系统工程,2006,24(2):90-95.
[4]孙瑞山,刘汉辉.航空公司安全评估理论与实践[J].中国安全科学学报,1999,9(3):18-23.
[5]沙卡奇 P B.飞行安全教程[M].北京:空军飞行事故和实效分析中心,1998.
[6]Guidelines and methods for conducting the safety assessment process on civil airborne systems and equipment:US,SAE,ARP 4761[P].1996.
[7]闻新,张洪钠,周露,等.控制系统的故障诊断和容错控制[M].北京:机械工业出版社,1998.
[8]姜斌,冒泽慧,杨浩.控制系统的故障诊断与故障调节[M].北京:国防工业出版社,2009.
XIE Wenjun1,2,QI Rong1,XIAO Lei3
1.School of Automation,Northwestern Polytechnical University,Xi’an 710072,China
2.College of Air Force Engineering,Air Force Engineering University,Xi’an 710038,China
3.Xi’an Satellite Control Center,Xi’an 710043,China
Electro-mechanical actuation system failure often leads to disastrous consequences.Using a top-down design idea, this paper proposes electro-mechanical actuation system analysis approach of the impact on flight safety.Τhis paper combines electro-mechanical actuation system failure mode and the flight control system failure model together.It obtains failure modes and effects analysis of electro-mechanical actuation system.It uses the Monte-Carlo method to obtain the electromechanical actuation system failure probability.Application of extreme value theory is used to calculate the flight safety probability.Simulation experiments demonstrate that this method can be used as the basis for security monitoring.
electro-mechanical actuation system;failure probability;Monte-Carlo
机电作动系统的故障往往导致灾难性的后果。采用自上而下的设计思路,建立了机电作动系统对飞行安全影响的分析方法。综合机电作动系统故障模式及飞控系统故障模型,对机电作动系统进行故障模式及影响分析,用Monte-Carlo法对故障进行随机性仿真,求得机电作动系统的故障概率,应用极值理论计算飞行安全概率。仿真实验说明:该方法可以用做进行安全监控的依据。
机电作动系统;故障概率;Monte-Carlo
A
U2
10.3778/j.issn.1002-8331.1111-0332
XIE Wenjun,QI Rong,XIAO Lei.Assessment methods of electromechanical actuation systems health situation impact on flight safety.Computer Engineering and Applications,2013,49(15):242-245.
航空科学基金(No.20080896009)。
谢文俊(1974—),男,副教授,主要研究领域为自动控制,故障诊断;齐蓉(1962—),女,博士,教授;肖蕾(1974—),女,博士,高级工程师。E-mail:sirxwj@163.com
2011-11-18
2012-02-21
1002-8331(2013)15-0242-04
CNKI出版日期:2012-05-09 http://www.cnki.net/kcms/detail/11.2127.ΤP.20120509.0845.001.html
猜你喜欢
防爆电机(2022年4期)2022-08-17
新世纪智能(数学备考)(2021年10期)2021-12-21
河北理科教学研究(2020年3期)2021-01-04
铁道通信信号(2020年11期)2020-02-07
汽车与新动力(2019年5期)2019-11-07
中学数学杂志(2019年1期)2019-04-03
广东技术师范大学学报(2016年5期)2016-08-22
汽车维护与修理(2016年3期)2016-02-28
电子器件(2015年5期)2015-12-29
汽车维护与修理(2015年6期)2015-02-28