
基于VB和PRO/E的凸轮机构三维参数化建模和运动仿真分析
2013-08-22 07:34冯立艳刘迎娟谢文志
制造业自动化 2013年4期
冯立艳,刘迎娟,谢文志,周 雪
(河北联合大学 机械工程学院,唐山 063009)
0 引言
凸轮机构具有结构简单、紧凑、设计方便和易实现预期运动等特点,因而在各种自动机械中都有着广泛的应用。
凸轮可分为盘形凸轮(沟槽式和平板式)、移动凸轮、圆柱或圆锥凸轮(沟槽式和端面式)等几种常见类型,从动件有直动和摆动两种运动形式,从动件的端部结构有尖顶、滚子、平底、球面等。从动件的运动过程一般包括推程、远休止、回程和近休止四个阶段,从动件在推程、回程常见的运动规律有等速运动、等加速等减速运动、摆线运动、简谐运动、五次多项式运动等。从动件的运动规律决定了凸轮的廓线形状,利用三维设计软件设计凸轮时,既要考虑从动件的运动规律,又要考虑各基本参数对凸轮轮廓的影响,这正是凸轮参数化三维建模的意义所在。
虽然Pro/E中的program能实现凸轮参数化三维建模,但整个建模过程不能脱离Pro/E软件,给操作带来诸多不便,故本文利用VB开发独立的程序界面,将输入值赋给AGW,再由AGW驱动Pro/E的自变量参数,即可生成新凸轮模型;将凸轮机构中的各参数和机构中零件的对应参数关联起来,自动实现尺寸驱动,生成新凸轮机构的三维模型。这种方法操作简便,效率高。基于VB和Pro/E的凸轮机构三维参数化建模和运动仿真分析的过程如图1所示。
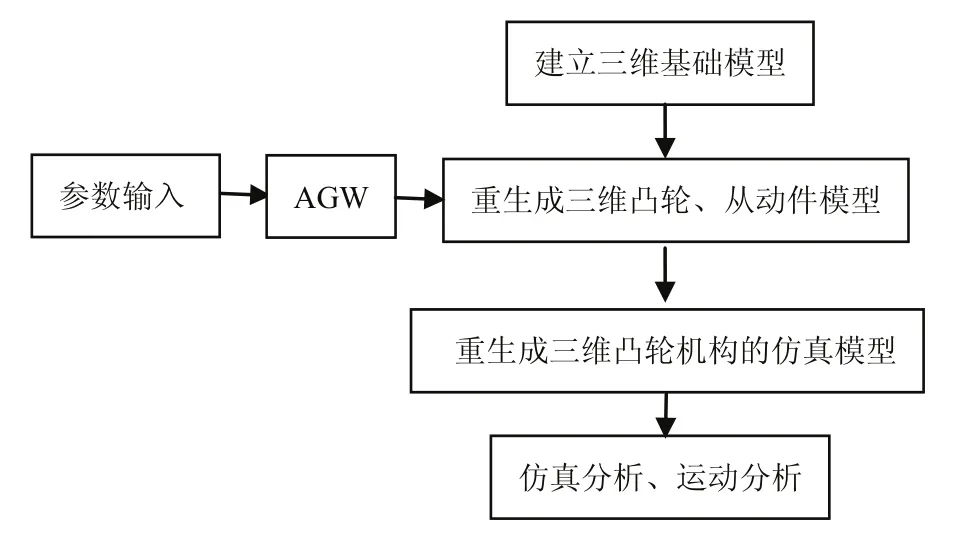
图1 凸轮机构三维参数化建模和运动仿真分析流程
1 凸轮的三维参数化建模
不同种类的凸轮需要的基本参数不同,现以偏置直动滚子从动件盘形凸轮机构为例,说明建模过程。
1.1 三维基础模型的建立
1.1.1 基本参数的设置
启动Pro/E环境,选择【工具/程序】命令,在INPUT和END INPUT语句中间输入图2所示的语句,存盘后,输入各参数初值。基本参数及程序中对应的变量代号如表1所列,其中的初始值任意给定,但要保证推程角、远休角、回程角、近休角之和为360°。

表1 凸轮机构基本参数的名称、变量及初始值
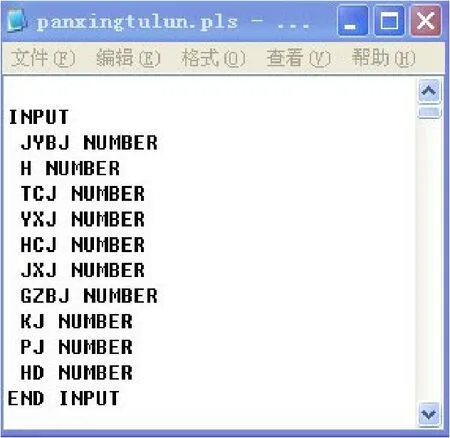
图2 自变量的名称及类型
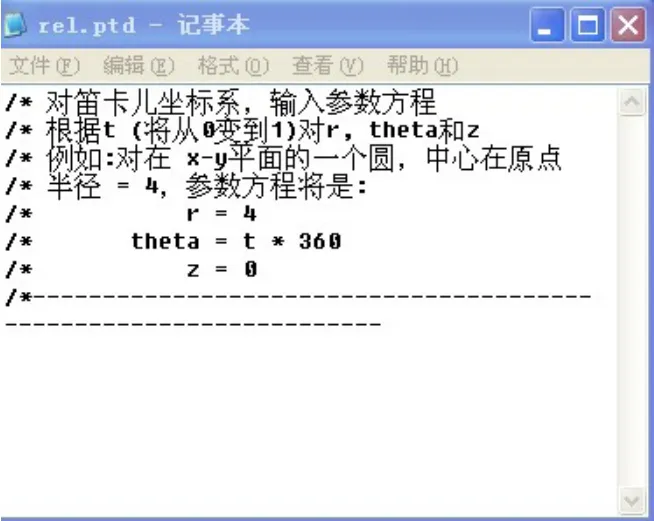
图3 凸轮廓线数学表达式的输入
1.1.2 凸轮廓线的创建
选择【插入/模型基准曲线】命令,选取【从方程】选项后,再单击【完成】选项,选择系统默认坐标系PRT-CSYS-DEF,选择坐标类型为圆柱坐标(r,theat,z),单击【确定】则系统自动弹出图3所示记事本应用程序,在其下面输入推程段凸轮理论廓线的数学表达式,如式(1),然后保存,退出记事本应用程序,就完成了推程段凸轮廓线如图4所示。
theta1=TCJ×t
r0=sqrt(JYBJ×JYBJ-PJ×PJ)
r1=r0+S1 (1)
theta=theta1+atan(PJ/r0)
r=sqrt(PJ×PJ+r1×r1)
z=0
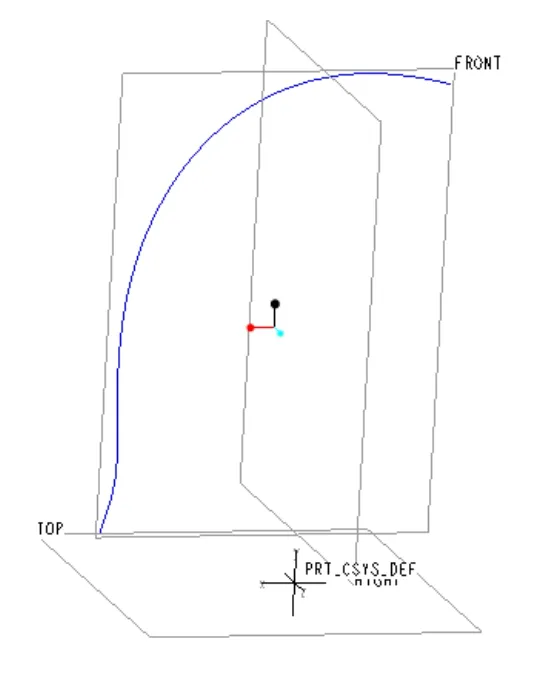
图4 推程段凸轮廓线
式(1)中的S1是推程的位移,若从动件推程为正弦加速度运动规律,则其推程运动方程为:S1=H×(t-sin(360×t)/2/pi)
改变式(1)中的theta1和S1(如远休止时theta1=TCJ+YXJ×t ,S1=H),其余不变,即可绘制凸轮其他三段(远休止、回程、近休止)的轮廓曲线,曲线绘制完成后凸轮的理论廓线如图5所示。
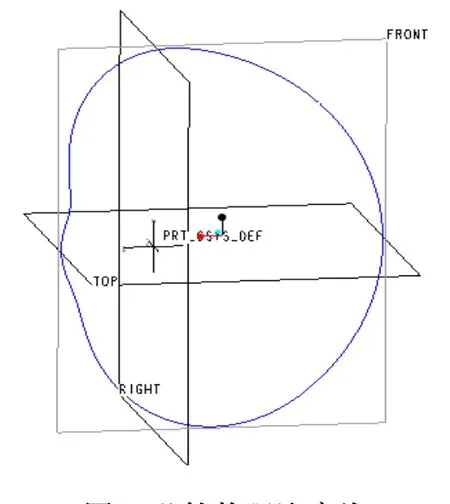
图5 凸轮的理论廓线
1.1.3 三维基础模型的生成
单击工具栏中的拉伸按钮,按凸轮的厚度拉伸理论廓线,就完成了凸轮理论廓线的实体建模;扫描一个与凸轮理论廓线相距为滚子半径的曲线,并向外拉伸,得到凸轮的实际轮廓曲面;点击拉伸,点击去除材料创建凸轮中心孔,完成与表1中的各初始值相对应的三维凸轮基础模型,如图6所示。
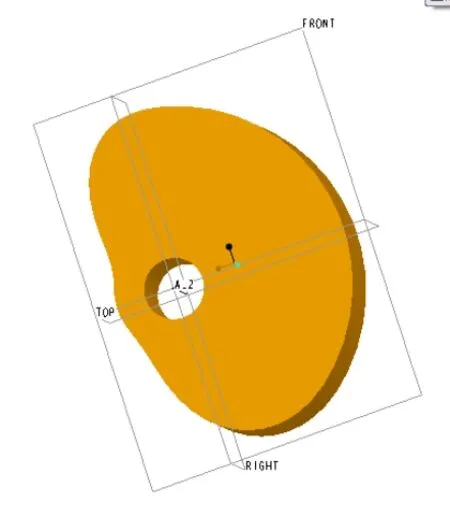
图6 凸轮的三维基础模型
1.2 新三维模型的生成
改变参数即可生成对应参数的凸轮三维模型。
如图7所示,运行VB程序,输入各参数,点击“确定参数”按钮,即可把输入的值通过AGW赋给Pro/E基础模型中的各变量,实现VB和Pro/E的连接,VB源程序如下:
Public gateway1 As New GWayAX ;'在VB的通用中添加
Dim JYBJ,H,TCJ,YXJ,HCJ,JXJ,GZBJ,KJ,PJ,HD As Single
Private Sub Command1_Click() '单击“确定参数”按钮对应的程序代码
Dim newwindow As EnumBool
modelName =" "& App.Path & " gbcs.asm"
newwindow = YES
gateway1.ModelRetrieve (modelName)
fb = gateway1.SessionSetCurrentModel(modelN ame, newwindow)
JYBJ = gateway1.ParamSetValue("JYBJ",Form1.Text1.Text)
H = gateway1.ParamSetValue("H", Form1.Text2.Text)
TCJ = gateway1.ParamSetValue("TCJ", Form1.Text3.Text)
YXJ = gateway1.ParamSetValue("YXJ", Form1.Text4.Text)
HCJ = gateway1.ParamSetValue("HCJ", Form1.Text5.Text)
JXJ = gateway1.ParamSetValue("JXJ", Form1.Text6.Text)
GZBJ = gateway1.ParamSetValue("GZBJ",Form1.Text7.Text)
KJ = gateway1.ParamSetValue("KJ", Form1.Text8.Text)
PJ = gateway1.ParamSetValue("PJ", Form1.Text9.Text)
HD = gateway1.ParamSetValue("HD", Form1.Text10.Text)
gateway1.ModelRegenerate '模型再生
End Sub
改变输入参数,立即生成凸轮的三维模型,生成的新凸轮如图8所示。
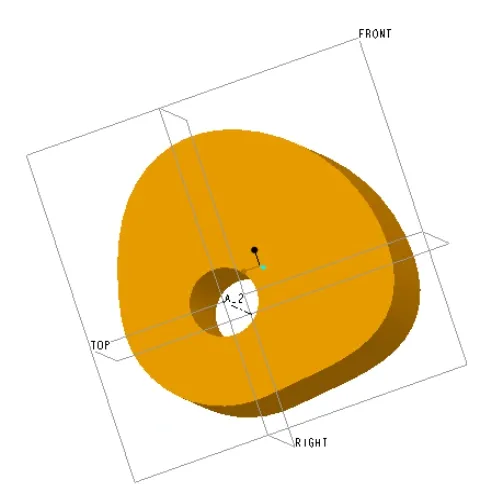
图8 与图7中参数对应的再生凸轮
2 凸轮机构的三维参数化建模方法
凸轮机构的参数化建模是将凸轮机构中各零件分别建立三维参数化模型,并使其相关参数关联起来,用参数化尺寸驱动整个凸轮机构。除了上述凸轮外,再分别建立滚子直动从动件盘形凸轮机构的机架、推杆、滚子、联接用销钉的三维参数化模型,分别调入各零件模型,将它们装配成凸轮机构tulunjigou.asm。
设置tulunjigou.asm的各参数,在RELATION和END RELATION之间输入如下语句:
EXECUTE PART GUNZI;
GZBJ = GZBJ
HD = HD
END EXECUTE
退出并保存,即完成了装配图中的参数与零件名称为GUNZI的滚子半径(GZBJ)和厚度(HD)的尺寸关联,逐一添加凸轮机构与机架、推杆、凸轮、销钉的各尺寸参数的关联,进而实现整个凸轮机构的参数化,与图7参数对应的凸轮机构如图9所示。
3 凸轮机构的运动仿真及运动分析
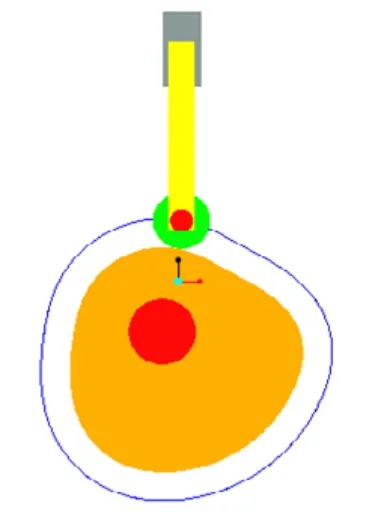
图9 凸轮机构的动态仿真
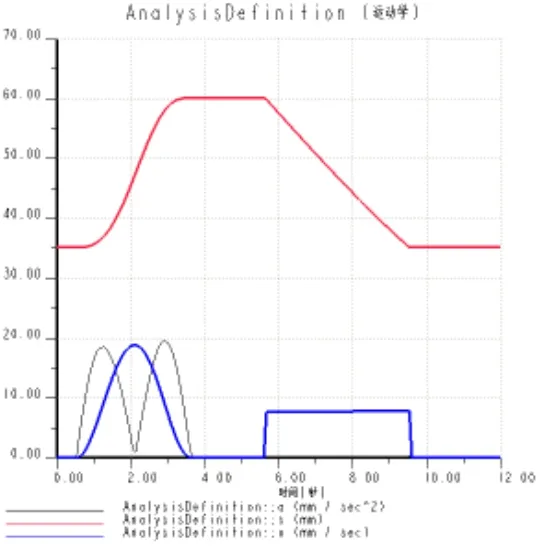
图10 一个周期内位移、速度、加速度与时间的关系曲线
利用Pro/E应用程序中的机构模块对凸轮机构进行运动学仿真和分析,设置凸轮的转动角速度为50度/秒。分别点击图7的“动态仿真”、“位移分析”、“速度分析”、“加速度分析”按钮,得到动态仿真过程,如图9所示,运转一周(12秒)的位移、速度、加速度分析结果如图10所示。图中,从动件推程作等加速等减速运动,回程作等速运动。
4 结束语
本文利用AGW实现了Pro/E和VB的数据传递,相比于使用Pro/E中的program更改参数,可操作性更强,设计者不必熟悉Pro/E软件即可完成凸轮的设计计算、三维实体建模、运动仿真及运动分析,大大地提高了设计的质量和效率。设计出的凸轮三维实体模型,可用于凸轮的设计、分析、数控加工等。本文的设计方法完全适应于其他类型的凸轮及凸轮机构。
[1] 黄恺,李雷,等.Pro/E参数化设计高级应用教程[M].北京:化学工业出版社,2008.
[2] 刘圣才,李春葆.Visual Basic 程序设计题典[M].北京:清华大学出版社,2002.
[3] 张继春. Pro/ENGINEER二次开发实用教程[M].北京:北京大学出版社,2003.
[4] 郭玉华.基于Pro/E的等加速等减速凸轮三维模型设计[J].煤矿机械, 2007, 28(6).
[5] 张友湖,夏秋华.基于Pro/E的圆锥凸轮机构参数化设计及运动仿真[J].机械传动,2011, 35 (1):31-33.
猜你喜欢
科学技术创新(2022年24期)2022-08-06
哈尔滨轴承(2021年1期)2021-07-21
哈尔滨轴承(2021年1期)2021-07-21
哈尔滨轴承(2021年4期)2021-03-08
哈尔滨轴承(2020年3期)2021-01-26
铁道学报(2020年9期)2020-10-09
天文学报(2019年6期)2019-12-10
制造技术与机床(2019年8期)2019-09-03
华东师范大学学报(自然科学版)(2019年3期)2019-06-24
华东师范大学学报(自然科学版)(2018年3期)2018-05-14
