
基于TRIZ的含噪声图像目标边缘检测算法
2013-08-27 06:48吕文阁涂晓斌成思源骆少明谭志忠
计算机集成制造系统 2013年2期
吕文阁,涂晓斌+,成思源,骆少明,谭志忠
(1.广东工业大学 机电工程学院,广东 广州 510006;2.东莞诺丽电子科技有限公司,广东 东莞 523050)
0 引言
受电弓是电力机车运行时从电网中取电的装置。在机车运行中,受电弓滑板发生电气磨耗和滑动磨耗是不可避免的,当受电弓滑板磨耗到一定程度时,容易造成拉网或卡网,由此可能引发严重的铁路交通事故[1]。因此,对受电弓滑板磨耗状态进行检测,对于保证机车正常运行和电网安全都具有非常重要的意义。近年来,随着机器视觉相关软硬件技术的日趋成熟,采用机器视觉技术对受电弓滑板的厚度进行非接触测量已经成为一种可行的方法。采用机器视觉技术检测受电弓的形状,具有反应迅速、计算简单、易于存储和再现、抗干扰能力强和易于实时控制等优点[2]。
机器视觉技术对受电弓的检测主要是对拍摄到的受电弓图像进行分析处理,获得需要的数据。在图像分析过程中,噪声会影响受电弓边缘轮廓的提取。传统的检测方法中检测目标边缘主要是对图像中单一像素进行分析处理,该方法对噪声比较敏感,因此在检测中往往得不到正确的目标边缘[3]。基于Canny算子边缘检测的基本思想是先将图像使用高斯函数进行平滑,再由一阶微分的极大值确定边缘点。二阶微分的零交叉点不但对应着一阶导数的极大值,而且对应着一阶导数的极小值。换句话说,图像中灰度变化剧烈的点与变化缓慢的点都对应着二阶导数的零交叉点,因此Canny算子可能会引入伪边缘点[4]。基于Roberts算子的边缘检测采用对角线方向相邻像素之差近似检测边缘,其定位精度高,在水平和垂直方向效果较好,但对噪声敏感[5]。基于Sobel算子的边缘检测是利用像素的上、下、左、右邻域的灰度加权算法,根据在边缘点处达到极值这一原理进行边缘检测。该方法在抗噪声好的同时增加了计算量,而且也会检测伪边缘,定位精度不高[6]。基于传统边缘检测方法的各项不足,本文提出一种以矩形区域为检测模板的局部目标边缘的检测算法。依据发明问题解决理论(Theory of Invention Problem Solving,TRIZ)中的物质-场模型[7]构建算法的描述模型,确定出算法在计算量和效率上的冲突关系,然后根据TRIZ理论中的物理冲突和技术冲突对算法加以分析和改进,以提高计算效率。最后,用现场实际图像对算法进行可行性验证,结果显示该算法在不显著增加计算量的同时可以克服噪声的干扰,能够准确快速地检测到目标边缘。
1 算法描述
应用机器视觉技术进行检测分析的前期,关键是进行图像分割,以消除背景和获得目标。图像分割通常是进一步对图像进行分析、处理、压缩编码的前期步骤,是机器视觉中最基本的问题之一,它几乎应用在有关图像处理的所有领域。常见的图像分割方法有基于边缘检测的分割方法和基于区域的分割方法[8]。
基于边缘检测的分割方法是先检测图像中的边缘点,再按照一定的策略连接成轮廓,从而构成分割区域,它能够获得像素灰度的局部变化强度,但对噪声比较敏感;基于区域的分割方法是根据图像数据的特征(包括灰度、边缘和纹理等特征)将图像空间划分成不同的区域,能够检测特征的相似性与均匀性,但难以确定目标区域内的种子区域或种子点[9-10]。现将两者结合起来,先对图像分别进行局部边缘检测,获得区域生长种子,然后进行区域生长,同时获得目标边缘和目标区域。
经对检测图像的观察发现,其上方部位除了干扰噪声外没有其他目标,适合进行局部边缘检测。传统的局部边缘检测算法采用点模板,但点模板的局部边缘检测算法无法克服噪声的影响。因此,考虑采用矩形模板检测局部边缘,即将一个矩形区域沿特定方向进行搜索,对矩形区域内像素的灰度值进行统计,如果超过分割阈值的像素个数达到一个比例值,则认为找到了该方向的边缘。显然,采用区域模板进行局部边缘检测可以克服噪声的干扰。
采用矩形模板检测局部边缘的问题是需要对模板区域内的每个像素进行灰度判断和统计记数,因此采用矩形模板检测局部边缘的计算量将远远超过点模板的局部边缘检测算法的计算量,很难满足对处理时间具有较高要求的实时检测,有必要进一步改进矩形模板检测局部边缘算法,以降低算法的计算量,提高计算效率。
2 物质-场分析
用TRIZ理论的物质-场模型建立边缘检测算法的描述模型,以确定冲突,如图1所示。其中:S1为目标;S2为图像;Fv为点模板。由物质—场模型可以看出,如果图像中没有噪声,则算法应当很好地搜索到目标边缘;但如果图像中有噪声存在,则算法不一定搜索到目标边缘(不足作用),甚至有可能搜索到错误的目标边缘(有害作用);按TRIZ理论对物质—场模型基本类型的定义,原始物质—场模型是一个无效完整系统。
针对图1模型中点模板边缘检测算法的不足作用和有害作用,根据TRIZ理论的76个标准解的No.12(在一个系统中有用作用和有害作用同时存在,而且必须处于接触状态,增加新的场F2抵消F1的有害作用,或获得一个有用的附加有用作用),添加一个区域模板补充这个不足作用并消除有害作用[11]。加入新场后的物质—场模型如图2所示。其中:S1为目标;S2为图像;Fv1为点模板;Fv2为区域模板。


3 问题的解决过程
3.1 问题描述
根据上述对算法的描述和分析可知,为了提高边缘检测算法抵抗噪声的能力,可以采用区域模板,通过统计区域模板内像素灰度超过分割阈值的像素数量来判断边缘,提高了算法的抗噪声能力,但也显著增加了计算量,降低了计算效率,从而形成算法设计中的冲突。该问题的理想情况就是使得改进后的算法在不显著增加算法计算量的基础上还具有抗噪声能力。
3.2 问题求解
3.2.1 基于物理冲突的区域模板尺寸确定
通过添加一个区域模板使边缘检测算法具有抗噪声能力。大尺寸的区域模板具有较强的抗噪声能力,但也增加了算法的计算量;如果减小区域模板的尺寸,则能够降低算法的计算量,但抗噪声能力也随之下降,当减小到极限(点模板)时,算法将失去抗噪声能力。
根据TRIZ理论,该问题的实质是一个物理冲突。边缘检测算法对区域模板尺寸有一个相反趋势的要求,既希望区域模板尺寸是大的,又希望区域模板尺寸是小的。因此,可以采用多个尺寸的变尺寸区域模板,最小尺寸区域模板为点模板,最大尺寸区域模板以能够覆盖噪声为宜。针对受电弓半弓图像分辨率,最大尺寸区域模板设置为20像素×20像素。
3.2.2 基于技术冲突的解决方案
根据TRIZ理论,从技术冲突的角度分析,该问题的实质是既要具有抗噪声能力,又要不显著增加计算量的技术冲突。在TRIZ理论描述技术冲突的39个通用工程参数中可以找到对应的参数来提高抗噪声能力,即改进特性对应的工程参数是No.13(结构稳定性)、No.27(可靠性)和 No.35(适应性及多用性);计算量增加,即恶化特性对应的工程参数是 No.15(运动物体作用时间)、No.25(时间损失)和 No.39(生产率)[12]。
依据基于TRIZ理论发明问题解决过程的模型,可选择相应的发明原理来解决出现的矛盾[13]。查找冲突矩阵表,得到的发明原理有No.1(分割)、No.2(抽取)、No.3(局部质量)、No.4(增加不对称性)、No.6(多用性)、No.10(预先作用)、No.13(反向)、No.23(反馈)、No.25(自服务)和 No.35(参数变化)[14]。可以看出TRIZ理论提供了具有抗噪声能力的边缘搜索算法的多种创新方案,这些方案为构造算法提供了新的思路,同时能有效地提高边缘搜索算法的效率。按照具体问题的特点,可以采用适当的方法对算法进行相应的改进,如No.1(分割)、No.13(反向)和 No.35(参数变化)。
4 算法实现及计算结果
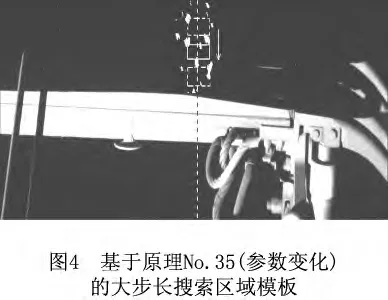
根据物理冲突解决方案和原理No.1(分割)重新构建算法,如图3所示,图3a所示为以点模板搜索边缘,其效果与传统的边缘检测方法相类似;图3b将区域模板尺寸增加到10像素×10像素,搜索边缘时,减弱小噪声的干扰,而且检测到的边缘相对于点模板更加清晰,但还是会受到较大的噪声干扰;图3c将模板尺寸加大到20像素×20像素时,完全可以检测到符合要求的边缘,这种通过加大模板尺寸在搜索区域移动区域模板来搜索边缘的方法,虽然可以得到清晰的边缘,但同时大大增加了算法的计算量。由于逐个像素搜索边缘的方法比较耗时,根据原理No.35(参数变化),以20像素×20像素的区域为模板加大搜索的步长,从而减少算法的计算量,算法原理如图4所示。由受电弓图像的分辨率,最大步长设置为30像素,步长设置过大会使搜索区域跳过检测目标而检测不到目标边缘。该方法每次都以一定的步长进行跳跃式搜索,当区域模板进入目标区域时,返回上一步的搜索点,并在该点开始逐个像素向下搜索边缘点。经过对跳跃搜索方法的实验与检测图像的观察发现,以适当的搜索步长检测目标时,模板进入目标时离所要检测的目标边缘很近,此时可以采用No.13(反向)原理在目标区域由内向外搜索边缘,算法原理如图5所示。相比前一种返回上一步后逐个像素搜索的方法,该方法更加节省计算时间,能够提高算法的计算效率。经测试,各算法检测到边缘所需的时间如表1所示,根据相应的数据绘制成的时间曲线如图6所示。


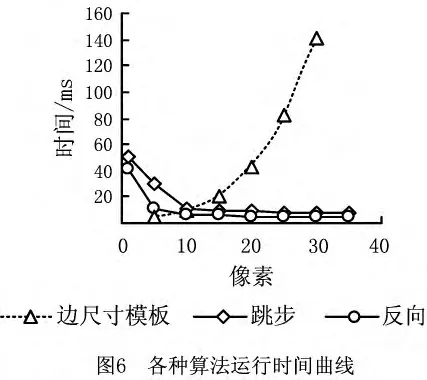
对表1和图6所显示的数据和实验结果分析可知,点模板虽然运行时间最短,但无法克服噪声的影响,在对含噪声图像的检测中一般很难发现正确的目标边缘;随着区域模板尺寸的加大,检测过程中受到的噪声影响减弱,当模板尺寸到达一个合适值(20像素×20像素)时,算法可以发现正确的目标边缘且受噪声的影响非常小,如果继续加大模板尺寸,则检测到的边缘会更加清晰,但由时间曲线可以看出,随着模板尺寸的增大,运行时间也显著增加,对处理时间有较高要求的实时检测系统很难满足要求。因此,可以得出将模板尺寸设置为20像素×20像素时,在得到清晰边缘的同时算法运行时间比较短。根据参数No.35(参数变化)在最大尺寸区域模板条件下,随着搜索步长的加大检测到边缘的时间呈递减趋势,步长越大,时间越短。通过大量实验总结出:加大搜索步长,步长为30像素时得到的检测效果最好,且检测效率最高。如果步长过大,则会使检测到的边缘线出现断点或检测不到边缘,该方法在一定程度上满足实时在线检测的要求。跳跃搜索方法的检测过程中区域模板进入目标区域内,此时应用参数No.13(反向)由目标区域内往外搜索边缘,由图6中的曲线可以看出,这种方法的运行时间相比跳跃搜索时间更短,同时检测到的边缘线更加准确,该方法完全可以满足实时检测的要求。

经由本文提出的算法检测到局部边缘后,沿着目标方向偏置一个距离,获得的像素点一定在目标区域内,以该像素为生长种子进行区域生长,就可以获得二值化目标图像,填充后的效果如图7所示。

表1 各算法运行时间
5 结束语
本文用TRIZ理论的物质-场分析构建出边缘检测算法的描述模型,根据TRIZ理论的冲突解决方法,构建了具有抗噪声能力的区域模板边缘检测算法。采用基于物理冲突解决方案、原理No.1(分割)、原理 No.35(参数变化)和原理No.13(反向)分别对算法进行重新构建,使得改进后的算法更适合使用在实时受电弓检测系统上。通过对实验结果的分析可知,改进后的算法在不损失抗噪声能力的同时,明显提高了计算效率。本文的创新点是将TRIZ理论与机器视觉中的边缘检测技术相结合,同时引入了区域模板的概念;难点在于如何准确构建出算法模型并通过TRIZ理论来提高算法的计算效率。以后的工作主要集中于如何提高算法的稳定性,进一步完善该算法针对更大噪声图像边缘检测的准确性。
[1] MA Li,WANG Zeyong,GAO Xiaorong,et al.Application of image processing in detecting the pantograph sliding[J].Electric Drive for Locomotives,2009(5):47-49(in Chinese).[马莉,王泽勇,高晓蓉,等.图像处理技术在受电弓滑板检测中的应用[J].机车电传动,2009(5):47-49.]
[2] RUAN Xiaohong,JI Xiaojun,CHEN Lesheng.Research of on-line detection system for contact components based on machine vision technology[J].Electronic Measurement Technology,2010(2):127-131(in Chinese).[阮晓虹,吉小军,陈乐生.基于机器视觉的触点零件在线检测系统研究[J].电子测量技术,2010(2):127-131.]
[3] ZHOU Changqing,PENG Wei.Evolution and application TRIZ theory of Su-Field model[J].Light Industry Machinery,2010(2):89-93(in Chinese).[周长青,彭 伟.TRIZ理论物-场模型的演化及其应用[J].轻工机械,2010(2):89-93.]
[4] ZHAO Hongzhong,ZHANG Yanchao.Image retrieval algorithm based on Canny edge detection operator[J].Electronic Design Engineering,2010(2):81-83(in Chinese).[赵宏中,张彦超.基于Canny边缘检测算子的图像检索算法[J].电子设计工程,2010(2):81-83.]
[5] DUAN Ruiling,LI Qingxiang,LI Yuhe.Summary of image edge detection [J].Optical Techique,2005,31(3):415-419(in Chinese).[段瑞玲,李庆祥,李玉和.图像边缘检测方法研究综述[J].光学技术,2005,31(3):415-419.]
[6] XING Jun.Edge detection of Sobel-based digital image [J].Microcomputer Development,2005(9):48-52 (in Chinese).[邢 军.基于Sobel算子数字图像的边缘检测[J].微机发展,2005(9):48-52.]
[7] KHASHMAN A.Noise-dependent optimal scale in edge detection[C]//Proceedings of the 2002IEEE International Symposium on Industrial Electronics.Washington,D.C.,USA:IEEE,2002,2:467-471.
[8] HU Xiaodan,TENG Zhongjian.Image segmentation method based on statistical model of noise[J].Computer and Modernization,2011(3):57-59(in Chinese).[胡小丹,滕忠坚.基于噪声统计模型的图像分割方法[J].计算机与现代化,2011(3):57-59.]
[9] MILAN S,VACLAV H,ROGER B.Image processing,analysis and machine vision[M].Iowa City,Iowa,USA:Thomson Learning and PT Press,2003.
[10] ZHANG Yujin.A course of image processing and analysis[M].Beijing:Posts & Telecom Press,2009(in Chinese).[章毓晋.图像处理和分析教程[M].北京:人民邮电出版社,2009.]
[11] TAN Runhua.Inventive problem solving theory[M].Beijing:Science Press,2004(in Chinese).[檀润华.发明问题解决理论[M].北京:科学出版社,2004.]
[12] YANG Mingliang,YANG Zhongqiang.Based on the theory of TRIZ in innovation design of the washing machine[C]//Proceedings of the 2011IEEE 18th International Industrial Engineering and Engineering Management(IE&EM).Washington,D.C.,USA:IEEE,2011,3:1838-1840.
[13] MICHAEL A .Inventive thinking through TRIZ:apractical guide[M].Berlin,Germany:Springer-Verlag,2006.
[14] ZHAO Min,SHI Xiaoling,DUAN Haibo.TRIZ introduction and practice[M].Beijing:Science Press,2009(in Chinese).[赵 敏,史晓凌,段海波.TRIZ入门及实践[M].北京:科学出版社,2009.]
猜你喜欢
小哥白尼(军事科学)(2022年2期)2022-05-25
China’s foreign Trade(2021年6期)2021-12-26
红领巾·萌芽(2019年8期)2019-08-27
中国与非洲(法文版)(2017年10期)2017-11-23
汽车与新动力(2017年3期)2017-06-29
通信产业报(2016年44期)2017-03-13
CHIP新电脑(2016年3期)2016-03-10
中华奇石(2015年5期)2015-07-09
电子设计工程(2014年18期)2014-02-27
雕塑(1999年2期)1999-06-28
