神舟九号热控设计及在轨工作评价
2013-09-19 00:50于新刚黄家荣范宇峰
载人航天 2013年2期
于新刚,黄家荣,张 立,范宇峰
(中国空间技术研究院总体部,北京100094)
1 引言
首次载人交会对接任务由天宫一号和神舟九号(SZ-9)共同完成,即前者作为目标飞行器是对接目标,后者运输飞船是追踪飞行器。SZ-9载人飞船的飞行任务是在SZ-8飞船的基础上进一步验证航天员手控交会对接技术,在组合体状态下载人飞船与目标飞行器成为一个整体。在神舟九号任务中,热控设计的主要目标是:
①保证整船仪器设备和结构的温度,特别是大量交会对接关键设备的温度;
②在环控生保系统的配合下实现对密封舱内温湿度、风速的控制;
③保证对整船热量的收集、传输、利用;
④实现船上废热向外部空间的排散。
相比较“第一步”载人飞船,神舟九号增加了交会对接和停靠工况。分析任务需求,热控设计的难点在于下面几个方面:
①工作模式多,功耗变化大。飞船存在自主飞行和停靠两种工作模式,因此其功耗变化比较大,在对接前交会对接设备开机,功耗接近2kW,在停靠阶段只有少量平台设备开机,功耗只有几百瓦,此外,运输飞船是按照标准载人飞船设计,能适应0~3人;
②存在低温停靠模式。在与目标飞行器完成对接后绝大多数设备关机,飞船处于类似于“休眠”的状态,此时要保证整船的温度满足要求,对热控设计是个挑战;
③新增交会对接设备。有的功耗很大、有的无功耗、有的控温范围要求很严,因此也必须开展针对性的主被动热控设计。
2012年6月16 日神舟九号载人飞船搭载3名航天员顺利发射升空,飞行试验结果表明,在飞行各阶段,整船仪器设备温度及密封舱气体温湿度均满足指标要求,热控设计具有良好的调控能力和适应能力。
2 热控设计
在继承之前飞船热设计经验[1,2]的基础上,针对神舟九号任务需求进行了热控设计。设计的基本思想是三舱独立设计,然后通过流体回路来实现对三舱热量的收集、传输和统一排散。整个流体回路是一个双回路系统,内回路从密封舱内收集热量、通过中间换热器传递给外回路,由外回路统一排散,这也是目前大型载人航天器常用方案[3,4]。
交会对接任务组合体状态下,密封舱内热耗较少,热控设计重点采取了以下措施来提高密封舱内气体、设备温度:
①提高外回路控温点,沿用神舟八号飞行的成功经验,在组合体飞行阶段,通过注入指令调节控温点温度,在保证外回路工质温度高于冰点的前提下,减少辐射器散热,提高密封舱气体温度;
②提高返回舱热控涂层的吸收比,为增加返回舱吸收的热量,提高舱内温度;
③减少密封舱内冷板数量,并对冷板背面进行热控包覆。。
④轨道舱仪器板和舱体之间采取隔热措施。为减少舱体漏热在轨道舱仪器板和舱壁之间增加隔热垫,提高舱内温度。
⑤载人飞船与目标飞行器对接完成后,飞船轨道舱前舱门打开,与目标飞行器密封舱形成一体,航天员将目标飞行器一侧的热支持软管拉至飞船返回舱,从返回舱抽风,风量约为7m3/min。热气体从目标飞行器实验舱经过轨道舱,流至飞船返回舱,如此循环,形成目标飞行器对载人飞船的热支持。

图1 单相流体回路示意图
3 性能评价
3.1 密封舱气体温度

图2 返回舱气体温度
图2、图3分别给出了轨道舱和返回舱的气体温度。密封舱气体温度在20~25℃之间,适宜航天员的在轨生活和工作。在自主飞行期间由于返回舱功耗远大于轨道舱,因此其气体温度高于轨道舱,而在停靠之后由于返回舱外无多层隔热材料,漏热较多,而且目标飞行器的热支持送风先经过轨道舱,因此轨道舱气体温度高于返回舱。由于返回舱涂层吸收比提高,因此其温度比改进之前提高1~2℃。此外由于目前密封舱内气体温度未进行闭环控制,因此密封舱内气体温度随着设备开关机以及姿态变化等因素影响发生波动,特别是在自主飞行和停靠的工作模式转换时气体温度变化明显。

图3 轨道舱气体温度
在组合体运行期间,飞船密封舱与目标飞行器实验舱之间的气体温差在3~4℃之间,根据热支持的风量计算得到目标飞行器对运输飞船的热支持在350~500W之间,与设计值和热平衡试验结果相符,目标飞行器的热支持很好的保证了停靠期间飞船密封舱的气体温度。
3.2 密封舱湿度
密封舱内湿度控制在自主飞行阶段主要通过轨道舱和返回舱内的冷凝干燥组件实现,在停靠段飞船不除湿,主要由目标飞行器控制整个组合体的湿度。图4、图5为轨道舱和返回舱的相对湿度的变化,轨道舱的相对湿度50~70%之间波动,返回舱相对湿度在30~50%之间波动。轨道舱是航天员生活产湿较多的区域,因此其湿度大于返回舱湿度,另外一方面轨道舱湿度传感器由于比较靠近舱壁,其附近温度较高,导致相对湿度较高,轨道舱内大部分区域相对湿度低于这一数值。

图4 轨道舱气体相对湿度

图5 返回舱气体相对湿度
入轨后包括组合体飞行初期,密封舱内湿度较高,在目标飞行器采取深度除湿后,舱内的湿度显著降低,表明目标飞行器对组合体湿度控制的作用明显。此外由于密封舱内湿度没有闭环控制因此随着人员活动和在轨工作模式的转换有所波动。
3.3 流体回路
流体回路系统是主动热控的核心,在流体回路系统中通过温控阀的动作调节通过辐射器和辐射器旁路的工质流量,从而实现对回路温度的控制。图6给出了流体回路控温点的变化,以及对应温控阀角度的变化。在自主飞行阶段控温点为8℃,停靠阶段为提高舱内温度,控温点改为12℃,温度控制良好,控温的精度在0.5℃以内。在热控预冷阶段,控温点设置为2℃,此时温控阀已开至最大,说明已达到回路系统的调节极限。
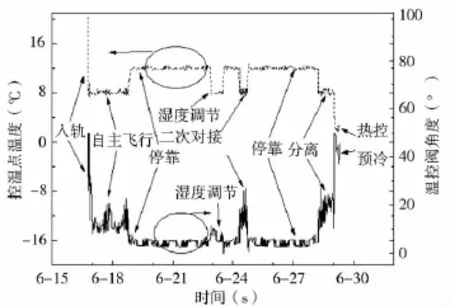
图6 流体回路控温点温度及温控阀角度
流体回路系统通过连接内、外回路的中间换热器将回路中密封舱内的热量转移至辐射器进行排散。图7表示了通过中间换热器的换热量,停靠期间通过中间换热器的换热量约为200W,自主飞行期间约为600W。在停靠期间由于冷凝干燥组件未工作,因此不从气体中带走热量,而内回路冷板上开机的设备功耗约为70W,因此流体回路管路以及冷板上设备导致的不可控漏热达到了130W。所以通过提高热控外回路温度从而进一步减少密封舱漏热提高密封舱气体温度仍有余量。
3.4 交会对接设备
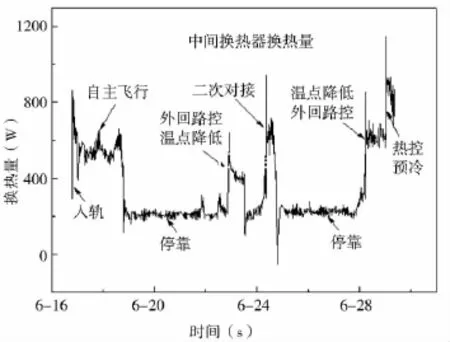
图7 内回路和外回路之间换热量
大量交会对接设备是交会对接任务的关键设备,这些设备大部分时间处于关机封存状态,交会对接期间开机,功耗变化很大,需要采取针对性的热控措施。交会对接设备在轨温度变化如图8所示,从图中可以看出设备温度良好,高低温段均满足设备工作温度要求,且有余量,可以满足交会对接任务需要。
微波雷达主机、交会对接灯等均是交会对接新增设备,微波雷达主机功耗超过70W,交会对接灯功耗超过50W,这些设备均在交会对接段集中开机,设备功耗大。为解决其散热问题,微波雷达主机热控采用了风机强制对流的方式散热;交会对接灯采取包覆多层,并开散热面的方式保证了高低温段的工作需求。飞行结果表明上述热控措施有效,证明了热控设计的正确性。
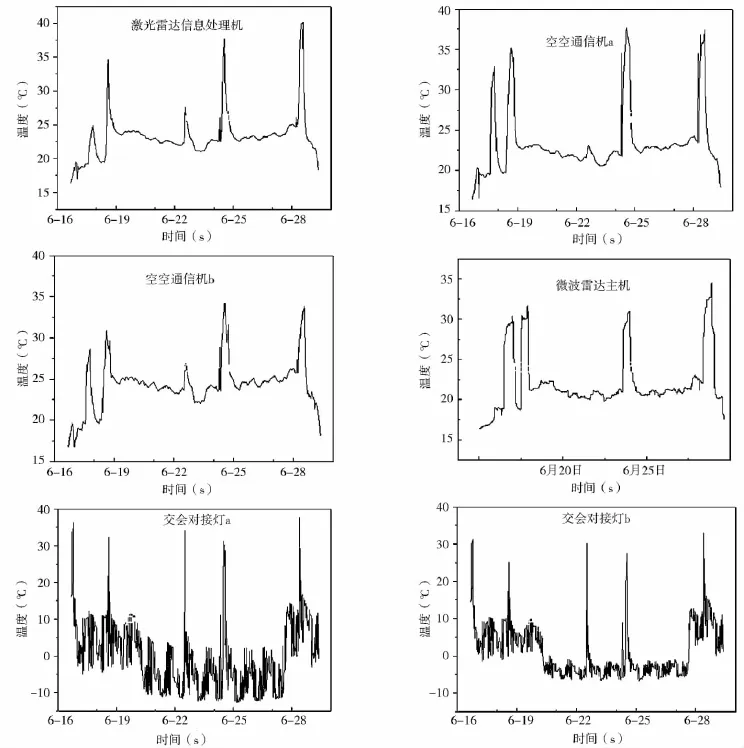

图8 交会对接设备温度
3.5 飞行数据分析及地面测试结果比对
热控系统在研制过程中为了验证热控设计进行分析和试验验证工作,热分析和热平衡试验的结果也得到了飞行数据的验证,所有仪器设备的分析值与飞行值以及热平衡试验与飞行值之间的偏差标准差小于2℃,这里重点给出密封舱内气体温度值的一个比较。从结果看,计算和热平衡试验的结果比较接近,差别均在2℃以内,验证了热分析和试验的正确性。
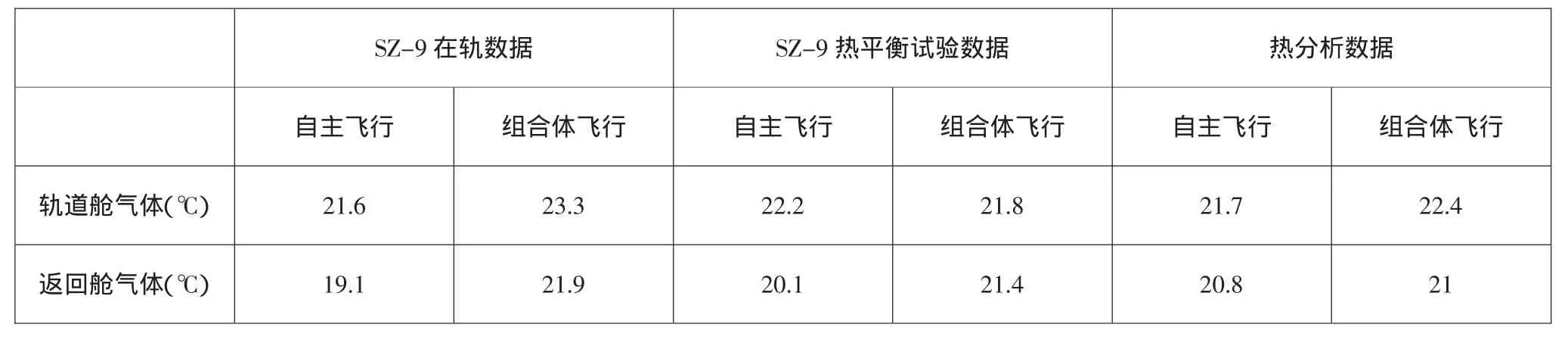
表1 密封舱内气体温度比对
4 结论
通过飞行任务经验,SZ-9载人飞船热控设计,可以得到以下的主要技术成果:
(1)首次验证了热控设计适应自主飞行和有人停靠的多种工作模式的能力
通过减少舱体漏热、灵活设置流体回路控温点、提高涂层的吸收比和通风热支持的方式,密封舱内气体温度大幅度提高,满足了3人飞行对热控分系统的控温控湿要求,满足交会对接任务的需求,此外在热控设计验证过程中形成的地面热试验中应用组合体热边界模拟技术,热、流动一体化集成仿真分析,将为后续的研制工作提供宝贵经验。
(2)高适应能力的单相流体回路设计与地面验证技术
通过采用流体回路工质脱气以及大容量补偿器的配置,实现了低温停靠时单相流体回路的正常工作,是对前期流体回路技术的一个突破,同时通过1:1流体回路试验,验证了交会对接高热负荷与停靠飞行低热负荷下流体回路控温算法和控温精度的方法也得到验证。
(3)载人飞船组合体飞行时,为减少流体回路带走热量,可考虑关闭内回路,从而提高密封舱内气体温度。
(4)对于载人飞船由于流体回路控温点设置较高,不利于除湿,舱内湿度高,要进一步降低舱内气体湿度,需要采取措施,降低回路控温点。◇
[1]黄家荣,范宇峰,刘炳清,卢威.神舟七号飞船热控分系统设计和在轨性能评估.中国空间科学技术,2009,10(5).
[2]范含林,黄家荣,刘庆志,张立.载人运输飞船流体回路方案研究.中国空间科学技术,2007,10(5).
[3]张加迅,李劲东,侯增祺.流体回路技术在大型航天器上的应用[C]//第六届空间热物理会议.广西:北京飞行器总计设计部,2003:9-14
[4] Joe Chambliss,Gary Rankin,Tim Bond.The State of ISS ATCS Design,Assembly and Operation[J].SAE,2003,1(1):5-18
猜你喜欢
北京航空航天大学学报(2022年7期)2022-08-06
军事文摘(2022年12期)2022-07-13
当代水产(2019年1期)2019-05-16
个人电脑(2016年12期)2017-02-13
电子制作(2016年19期)2016-08-24
太空探索(2016年5期)2016-07-12
太空探索(2016年9期)2016-07-12
太空探索(2016年7期)2016-07-10
空间控制技术与应用(2015年3期)2015-06-05
创业家(2015年1期)2015-02-27