目标航迹的快速起始
2013-09-19 10:18卫青春赵华敏
无线电工程 2013年1期
卫青春,赵华敏,陈 镜
(中国电子科技集团公司第五十四研究所,河北石家庄050081)
0 引言
近程探测和跟踪设备,尤其是用于野战环境条件下末端拦截的地面搜索和跟踪系统,由于对方低空突防兵器发现距离较近,能够探测到的目标数据量非常有限,靠积累足够数量的探测数据后形成航迹,突防兵器往往已接近我防御目标,时间较为紧迫,因此要求对探测目标在获得2~3次的有效探测后,能以较高的正确率形成目标航迹,提供出目标指示参数[1,2]。
1 回波凝集和副瓣消除
为了使航迹快速起始,在获得有效探测数据后,首先要对点迹数据进行预处理,充分挖掘测量数据含有的有用信息,提高数据质量,需要使用稳健有效的方法对回波点迹数据进行质心凝集,提高数据精度,降低噪声和杂波的影响,同时要消除近距离波束副瓣引起的目标混淆。
1.1 点迹的稳健凝集
边搜索边跟踪的两坐标连续波探测跟踪系统,其探测目标的测量参数为:t、R、A、、V,分别对应探测目标的时标、径向距离、方位、径向速度、回波幅度,其测量周期为天线的回转周期T。当天线波束扫过覆盖目标时,会获得多次回波量测,受信噪比和测量误差影响,造成目标的多次量测在距离和方位上会在一定范围内发散。当距离较近或有强杂波的影响时,表现更为明显,因此需对目标回波进行质心凝集。
假设天线波束在第m个周期扫过覆盖目标时间内的n次连续回波序列为:
其回波幅度Vmi受天线方向图调制,常用的目标质心凝集方法为幅度加权法。
当信噪比较高时幅度加权法可获得较高的凝集质量,由于低空突防目标多为小目标和弱回波目标,其信噪比、信杂比较差,使得同一次扫过目标的连续回波幅度波动较大,且近程目标积累时间有限,实际工程中用幅度加权法造成了凝集结果波动较大,效果不理想。
利用目标回波的对称性,采用量测平均法,达到了稳健性较好的凝集效果。方法为:首先进行来自同一目标的连续回波序列判别,当连续回波序列同时满足:
则认为该序列为同一目标的回波。
在式(1)中,kt为连续2次量测的时标间隔门限。

kR为测距分散允许门限。

实际进行式(1)、式(2)和式(3)判定时,允许回波序列中漏测一点或两点,即在满足式(2)和式(3)后,当量测间隔不满足式(1),而适当放大门限kt时满足式(1),此时允许参数统计平均时插值补上一点或两点求平均。若回波序列中连续漏测三点,则认为目标回波结束。
对同一目标连续回波序列判定结束后,其回波质心凝集坐标取序列坐标的平均值为:
式中,n为参与回波质心凝集的点数,(tm,Rm,Am,,Vm)为凝集后的质心坐标参数,在进行后续的航迹处理时,其作为一个点迹对待。
1.2 副瓣回波的消除
近距离探测由于天线方向图副瓣的作用,出现副瓣探测到目标的情况,通过质心凝集后,如图1所示,其中B1、B2为应去掉的副瓣凝集质心。
副瓣探测到目标,其距离、方位、速度和回波幅度同主瓣探测同一目标的参数有关联,应区分后去掉。如果发现凝集后某2个目标质心:M(tm,Rm,Am,Vm)和W(tw,Rw,Aw,,Vw)的距离差、方位差、速度差、幅度差同时满足:

则认为其中幅度小的目标凝集质心为副瓣回波,可以去掉,无需参加后续处理。
在式(5)中,Δθ为天线主副瓣指向角度间隔;kθ为天线副瓣宽度参数。式(7)中,kV为增益差门限,与天线主副瓣增益比有关。

图1 3个目标A、B、C回波及凝集后示意图
1.3 辅助质心的消除
当副瓣回波消除后,若在同一测量分辩单元范围内,出现速度不同的多个目标凝集质心,则保留回波幅度最强的目标质心参与后续的航迹处理,其余为目标本身辅助部件运动状态不同引起的,可作为目标辅助识别使用,航迹处理可不考虑。
通过对目标质心的稳健凝集、副瓣回波消除和辅助质心消除后,保留了原数据携带的有用信息,有效滤除了数据的部分噪声,提高了数据精度,获得了高质量的目标回波点迹,减少了后续数据处理的工作量,为航迹快速起始奠定基础。
2 航迹起始模型和处理算法
点迹数据经过质心凝集、副瓣消除和辅助质心消除的预处理后,进入点迹匹配和航迹起始阶段[3]。在边搜索边跟踪系统中,对目标的探测周期为T,同一目标的第i次和第i+1次探测获得的距离、方位、径向速度具有很强的相关性。
2.1 两点起始航迹
假设目标为匀速或匀加速直线运动,其飞行方向的线速度,在连续2次天线扫过目标时不变或匀加速变化,连续2次探测结果示意图如图2所示。
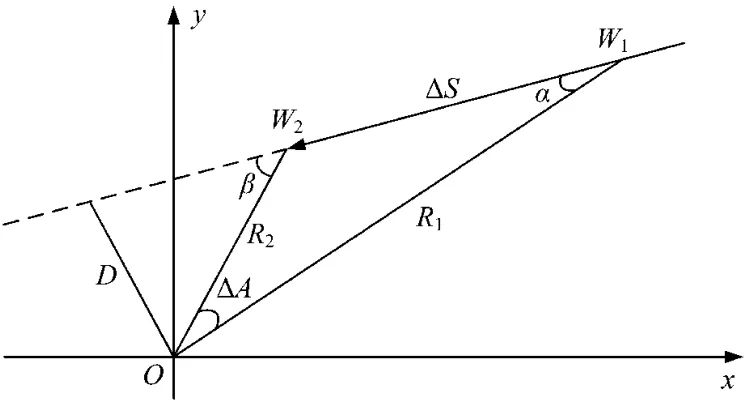
图2 W1、W2两位置示意图
假设t1时刻天线第1次扫过目标,位置点为W1;t2时刻天线第2次扫过目标,位置点为W2。
两时刻差为:
为天线帧间扫过同一目标的间隔。对应t1、t2两时刻的量测分别为:径向距离 R1、R2,方位角 A1、A2,径向速度,则通过以下的计算来判断两点的位置和速度相关性。
①计算两点的距离。

式中,ΔA=A2-A1为方位角差。
②计算α角。
③计算β角。
④计算W1点的瞬时线速度。
⑤计算W2点的瞬时线速度。

两点迹相关性判断条件为同时满足:
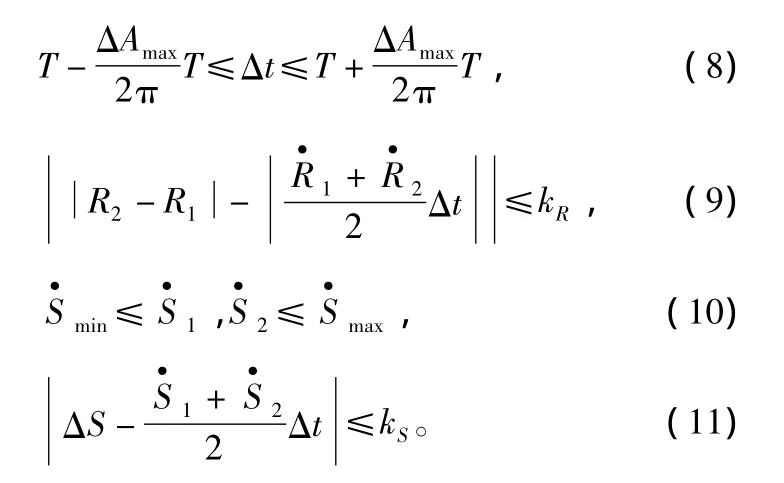
式(8)、式(9)、式(10)和式(11)分别为时间/方位相关、径向距离增量相关、线速度范围判定、点迹距离相关。
式(8)中,ΔAmax为在相邻探测帧时间内目标运动可引起的方位角最大变化量,式(11)中,kS为距离动态相关门限。
当相邻探测帧的2个回波点迹,同时满足式(8)、式(9)、式(10)和式(11),即表明2个位置点W1、W2在时间/方位、径向距离增量、线速度和点迹距离相关条件满足要求,可认为2个点迹是同一目标的2次帧间探测,航迹由此起始,建立起航迹头,依据航迹处理模型,滤波器开始工作,输出航迹数据。
实际应用中考虑到目标检测可能有漏警,当连续2帧没能满足起始条件时,考虑连续3帧中有2次有效探测,获得检测目标的情况。这时,
为2个探测周期,其他门限做出调整后,航迹起始仍可用式(8)、式(9)、式(10)和式(11)判定,满足条件后起始航迹。
2.2 三点起始航迹
在实际应用中考虑到建立较高质量快速起始航迹的需求,可采用三点起始航迹。在满足两点起始条件后,依据航迹处理滤波器模型,如α-β、α-βγ、Kalman 及交互多模型(IMM)滤波器[3-6]等处理方法,滤波器开始工作,利用起始两点外推预测第三点W3的预测参数值:径向距离、方位角。当天线在t3时刻第3次扫过同一目标时,获得W3点的实测值(R3,A3)。当 Δt=t3- t2满足式(8)后,按航迹与点迹相关波门判定,用
进行相关判定。
一旦式(8)和式(12)同时满足,则可满足三点起始航迹条件。三点起始航迹较两点起始航迹的质量为高,相当于在两点起始的基础上进行了第三点验证。
在之后的航迹处理中,按照滤波模型,进行航迹预测,航迹预测点与实测点迹的相关匹配、航迹平滑和滤波,输出航迹数据。
3 工程实践验证
在多个项目实践中,两点和三点快速起始航迹都得到了验证,典型的两点和三点起始航迹实测处理图如图3和图4所示。
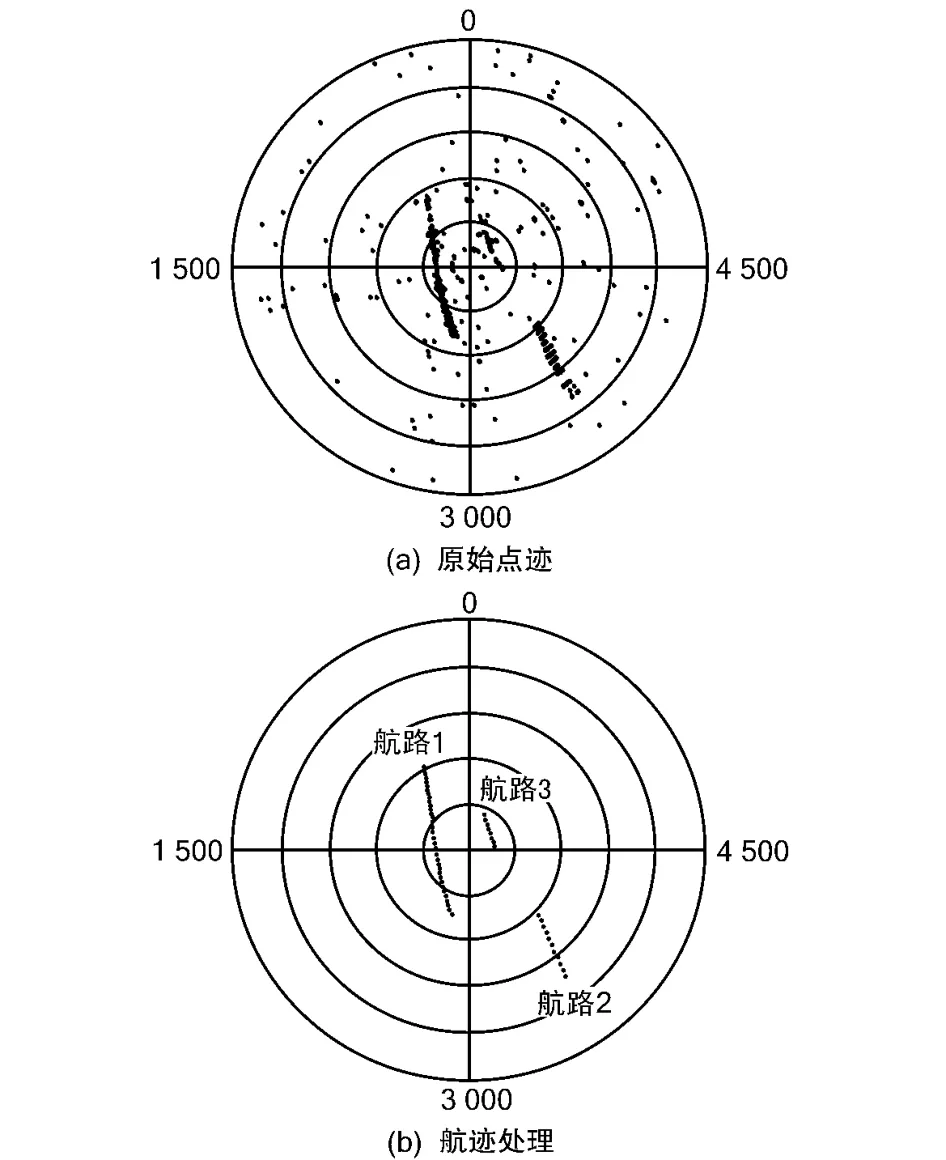
图3 两点起始航迹

图4 三点起始航迹
图3(a)为飞机先后以100 m/s和170 m/s不同速度飞行情况下,探测的3条原始航路点迹图,其方位上点迹分布超出3 dB天线波束宽度,呈现了较宽的发散性,径向距离在200 m范围内发散,经目标质心的稳健凝集和两点相关后起始,建立起了稳定的航迹图,如图3(b)所示。
图4(a)为某型直升飞机在近距离低空100 m高度飞行的一条原始航路点迹图,其方位和距离点迹均有一定程度的发散,部分点迹方位上分布超出4 dB天线波束宽度,径向距离在250 m范围内发散,呈现了较宽的发散性,并且航路中间为机动转弯,经目标质心的稳健凝集和三点相关后起始,建立起稳定的航迹图,机动转弯处仍稳定跟踪,如图4(b)所示。
多项工程实践中统计,当发现概率为80%时,两点包括三点中发现两点的情况,平均有效目标点迹2.5个,则可起始航迹;在近程低空探测每圈不多于50个点迹的条件下,两点起始航迹的正确率为91%以上,三点起始航迹的正确率在96%以上,取得较好的处理效果,没有漏警的情况。
4 结束语
根据边搜索边跟踪两坐标连续波探测系统特点,通过对近距离目标回波规律的分析,提出了目标质心凝集、副瓣回波和辅助质心的消除方法。通过这些方法的预处理,进入后续处理的点迹数大大减少。在此基础上,给出了两点起始航迹和三点起始航迹的方法。据此开发的数据处理软件对实测数据进行了处理,获得了较高的数据精度,达到了快速起始的目的,取得满意的工程效果。
[1]董志荣.论航迹起始方法[J].情报指挥控制系统与仿真技术,1999(2):1- 7.
[2]吴顺君,梅晓春.雷达信号处理和数据处理技术[M].北京:电子工业出版社,2008.
[3]杨万海.多传感器数据融合及其应用[M].西安:西安电子科技大学出版社,2004.
[4]张红旗.基于交互多模型的低空目标跟踪算法研究[J].无线电工程,2009,39(12):13 -16.
[5]王小谟,匡永胜.监视雷达技术[M].北京:电子工业出版社,2008.
[6]Blackman S S.Multiple-target Tracking with Radar Application[M].Artech House,INC,1986.
猜你喜欢
舰船科学技术(2022年22期)2022-12-13
成都信息工程大学学报(2022年4期)2022-11-18
汽车实用技术(2022年4期)2022-03-07
北京航空航天大学学报(2021年9期)2021-11-02
华东师范大学学报(自然科学版)(2020年1期)2020-03-16
数字通信世界(2020年2期)2020-03-04
青年歌声(2019年12期)2019-12-17
火力与指挥控制(2019年4期)2019-06-14
北京航空航天大学学报(2017年7期)2017-11-24
北京航空航天大学学报(2016年6期)2016-11-16