
基于三维动态捕捉系统和Matlab的穿戴式下肢外骨骼步态分析
2013-09-21 07:24孟庆鑫李志瑶
长春大学学报 2013年12期
孟庆鑫,李志瑶
(1.长春理工大学 机电工程学院,长春 130022;2.长春大学 机械与车辆工程学院,长春 130022)
基于三维动态捕捉系统和Matlab的穿戴式下肢外骨骼步态分析
孟庆鑫1,李志瑶2
(1.长春理工大学 机电工程学院,长春 130022;2.长春大学 机械与车辆工程学院,长春 130022)
使用三维动态捕捉系统获取人体下肢关键点的运动轨迹和三维数据,用Matlab软件分析数据,绘制时间-坐标图形,建立穿戴式下肢外骨骼的三维模型,为进一步研究穿戴式下肢外骨骼奠定基础。
三维动态捕捉;下肢外骨骼;Matlab分析;三维模型
0 引言
穿戴式下肢康复外骨骼是近年来出现的一种新型康复器械,作为医疗器械的一个重要分支,它的研究融合了康复医学、生物力学、机械学、机械力学、电子学、材料学、计算机图形学、数学分析以及机器人学等诸多的领域,已经成为了国际康复器械领域的一个研究热点。
基于穿戴式下肢外骨骼的Matlab分析主要是针对外骨骼的运动学分析。机构运动学主要从几何角度出发,研究机构的位移、速度、角速度和加速度与位置变量之间关系,包括机构上的点的轨迹、速度、加速度等运动特征,并不考虑引起这些运动的力和力矩。运动学是机构结构分析的基础,也是机构速度分析、加速度分析及总体机构的基础。
本文使用ProE软件绘制穿戴式外骨骼三维模型,使用三维动态捕捉系统获得人体下肢运动轨迹,使用matlab分析轨迹,进行运动学分析,确定人体步态,为下一步研究奠定基础。
1 建立穿戴式下肢外骨骼三维模型
穿戴式下肢外骨骼采用拟人化设计,以下肢运动轨迹为依据进行结构设计,机械关节的活动范围必须保证能在正常人的步态范围之内。人体下肢运动关节主要由髋关节、膝关节、踝关节三个部分组成,髋关节主要运动特征为前屈、伸缩、收缩、外展、内旋、外旋、绕环;膝关节主要运动特征为前屈、伸缩、内旋、外旋;踝关节主要运动特征为前屈、伸缩。通过三个主要关节的运动特征的比较可知,各关节的运动虽不相同,但都是以前屈、伸缩运动为主要运动特性。
穿戴式下肢外骨骼主要分为髋关节部分、膝关节部分和踝关节部分。髋关节为多轴性关节,能作前屈、伸缩、旋转运动;膝关节为内旋/外旋、前屈/后伸两个动作;踝关节为内旋/外旋、前屈/后伸、内收/外展三个动作。
根据对穿戴式下肢外骨骼的结构分析,可绘制出下肢外骨骼的三维结构图,如图1所示:
穿戴式下肢外骨骼的三维结构图为下一步进行结构设计,优化结构模型奠定了基础。
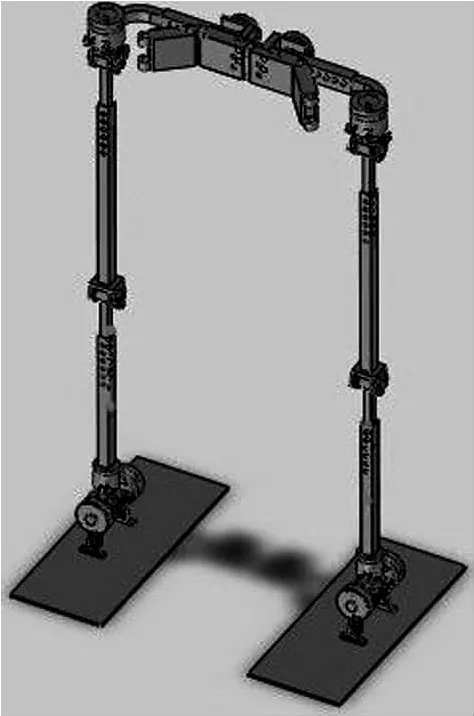
图1 外骨骼结构图
2 三维动态捕捉系统简介
三维动态捕捉系统包含捕捉摄像机、连接缆线、供电系统及数据交流用的集线器硬件、系统校准套件和捕捉反光球。系统配有专门的运动捕捉软件,进行系统设定、捕捉过程控制、捕捉数据的编辑处理、输出等。在实验人员的腰、髋、膝盖、脚踝、大腿、小腿和脚尖、脚跟等部位粘贴maker点,使用cortex系统捕捉maker点的运动轨迹,同时生成maker点的坐标,以便后期的数据处理。
图2为maker点在实验人员身体上贴的位置:
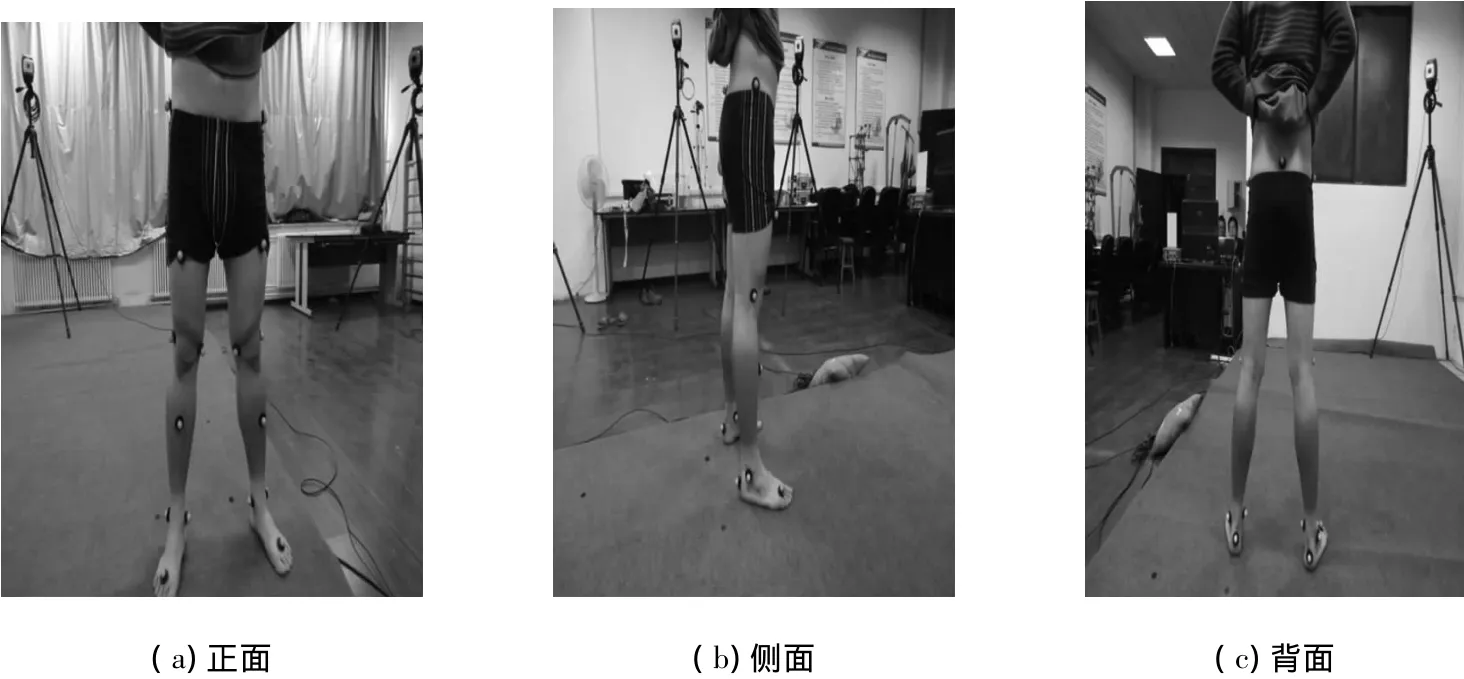
图2 maker点在实验人员身体上贴的位置
当实验人员以正常步态行走时,动态捕捉系统的捕捉摄像头会捕捉maker点的轨迹,并在cortex系统上形成maker点的轨迹图像,通过系统的连线功能,连接maker点,形成人体简化骨骼图像。
3 动态捕捉系统的图像采集和数据分析
一个正常人的步态又分为两个阶段,即支撑期和摆动期。支撑期以足跟接地开始,当脚趾离地时即进入摆动期。正常人的步态周期可划分为双侧支撑期、单侧支撑期和摆动期。支撑期占总体步态周期的60%(其中单侧支撑期占40%,双侧支撑期占20%),摆动期占总体步态周期的40%。双侧支撑期中包括承重期和摆动前期,各占步态周期的10%。
平地直线行走是下肢运动的最基本形式,也是穿戴式下肢康复机器人的主要模拟目标和评定指标。图3为动态捕捉系统捕捉的人体下肢摆动周期图像(采集频率为60Hz):
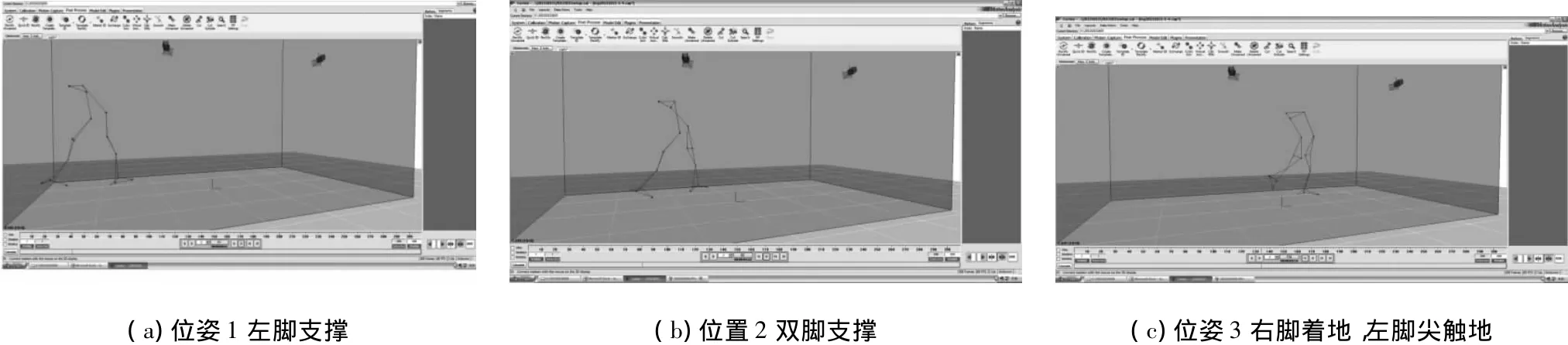
图3 动态捕捉系统捕捉的人体下肢摆动周期图像(采集频率为60Hz)
根据动态捕捉系统采集的图像自动生成的maker点的坐标,采用对步态分析最关键的髋、膝、踝关节处的maker点进行matlab分析,绘制时间-位移二维图像。如图4所示:
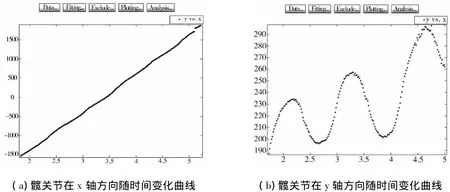
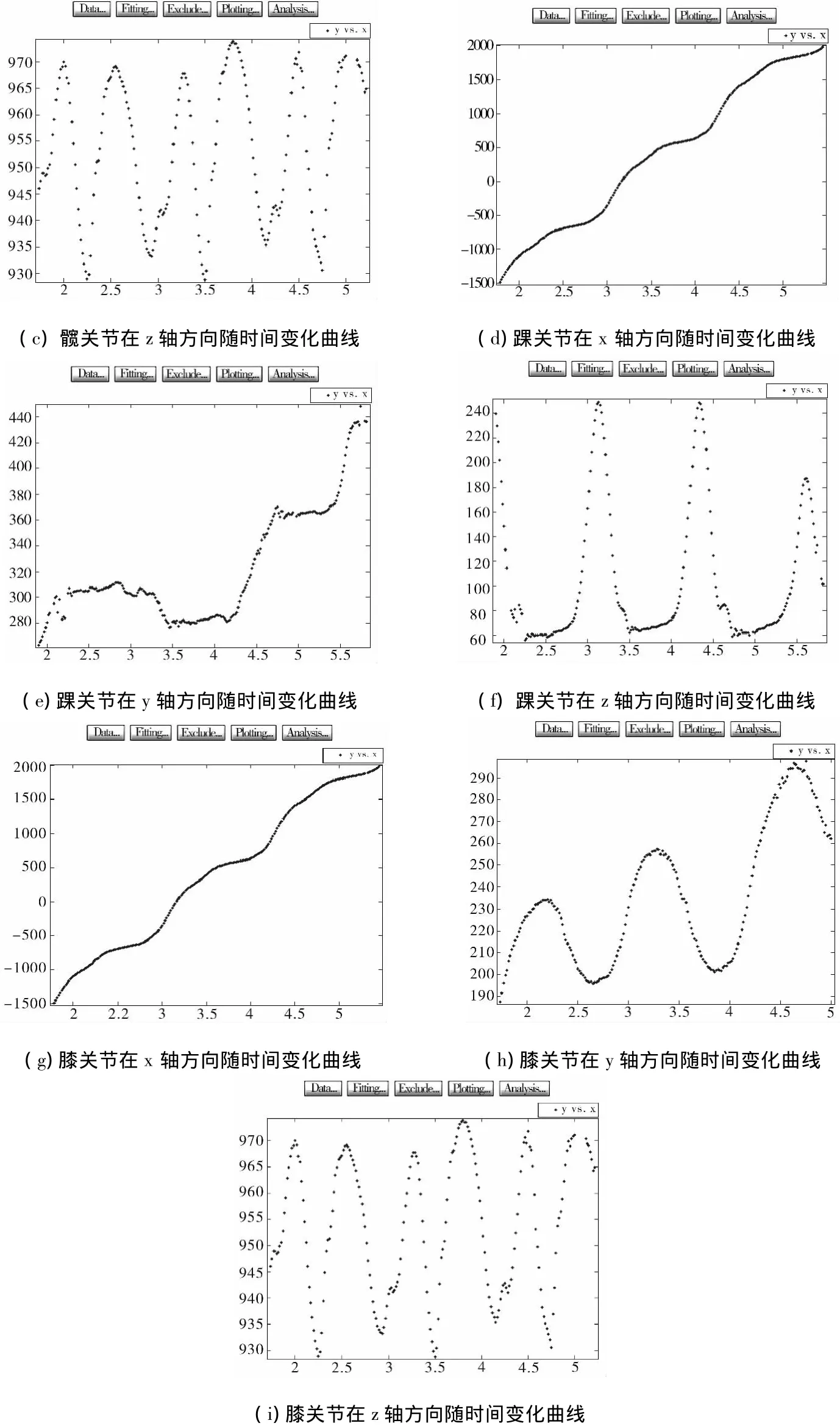
图4 时间-位移二维图像
图4中的采集点轨迹中有些并不连贯,是由于采集过程中因为肢体遮挡住了maker点,或捕捉摄像机未能有效捕捉到maker点,造成轨迹出现乱点。
4 结语
由matlab图像分析可知,髋、膝、踝关节在x轴随时间运动特征基本是一条直线,符合直线运动特征,而各关节在y轴的运动特征有一定的周期性,说明人体在行走过程中有一定的左右摆动,各关节在z轴的运动特征有明显的周期性,符合人体步态摆动期的运动特征。
通过三维动态捕捉系统采集的运动轨迹参数和三维数据,得到正常人的步态数据,应用matlab软件分析数据,确定人体髋、膝、踝关节的运动特征,为穿戴式下肢外骨骼的设计提供理论数据,为下一步研究穿戴式下肢外骨骼奠定了基础。
[1]丁玉兰.人机工程学[M].北京:北京理工大学出版社,2000.
[2]郑秀媛.现代运动生物力学[M].北京:国防工业出版社,2002.
[3]赵彦峻.人体下肢外骨骼工作机理研究[D].南京:南京理工大学,2006.
[4]罗家佳,胡国清.基于MATLAB的机器人运动仿真研究[J].厦门大学学报,2005,44(5):640-644.
[5]尹军茂.穿戴式下肢外骨骼机构分析与设计[M].北京:北京工业大学,2010.
Analysis on Wearable Lower Extremity Exoskeleton Gait Based on 3D Dynamic Capture System and Matlab
MENG Qing-xin1,LI Zhi-yao2
(1.School of Mechatronical Engineering,Changchun University of Science and Technology,Changchun 130022,China;2.College of Machinery and Vehicle Engineering,Changchun University,Changchun 130022,China)
This paper obtains the trajectory and 3D datum of human lower limb key points by 3D dynamic capture system,uses Matlab software to analyze the datum,draws the time-coordinate graphics and establishes a 3D model of wearable lower limb exoskeleton,which lays a foundation for further study on wearable lower limb exoskeleton.
3D dynamic capture;lower limb exoskeleton;Matlab analysis;3D model
TP 242.3
A
1009-3907(2013)12-1576-03
2013-10-28
孟庆鑫(1985-),男,辽宁葫芦岛人,硕士研究生,主要从事机械制造及其自动化方面的研究。
李志瑶(1963-),女,吉林长春人,教授,博士,主要从事机械制造及其自动化方面的研究。
责任编辑:
吴旭云
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08
中老年保健(2021年7期)2021-08-22
小哥白尼(野生动物)(2021年12期)2021-03-29
高师理科学刊(2020年2期)2020-11-26
电子制作(2018年18期)2018-11-14
自动化学报(2018年6期)2018-07-23
中华骨与关节外科杂志(2016年6期)2016-05-17
中华骨与关节外科杂志(2016年3期)2016-05-17
中国民族医药杂志(2016年5期)2016-05-09
工业设计(2016年6期)2016-04-17
