一种高精度低复杂度波达方向估计新方法
2013-10-18 09:39杨小凤
无线电工程 2013年1期
杨小凤
(玉林师范学院电子与通信工程学院,广西玉林 537000)
0 引言
DOA估计在波束形成、信号检测和定位等领域有着广泛的应用。波束形成和信号检测技术采用实时DOA估计,二者对估计精度的要求并不高。定位技术是在移动自主网(Mobile Ad-hoc Network)中实现频谱共享和分配的关键,它需要高精度的DOA估计[1-3];另一方面,移动自主网中的节点存在资源有限的特点,因此定位机制采用的DOA估计又必须满足低复杂度的要求。
为此,诸多DOA估计算法被提出来,比如,延迟相加法(Delay-and-Sum,DAS)[4]、多重信号分类算法(Multiple Signal Classification,MUSIC)[5]和求根MUSIC 算法(Root-MUSIC)[6]。DAS 对不同的扫描方向形成不同的权值,将阵列天线各阵元的输出进行加权求和,从阵列输出功率峰值点判定DOA。DAS的DOA估计精度不高,然而,它的低复杂度性能使得它适合用于实时粗略的DOA估计。此法运算简单,易于在FPGA系统上实现。MUSIC通过对阵列接收数据的数学分解,将数据划分为2个正交的子空间:信号子空间和噪声子空间,利用2个子空间的正交特性构造出“针状”空间谱峰,大大提高了DOA估计的分辨力。Root-MUSIC是MUSIC的多项式求根形式,利用噪声子空间构造一个多项式,通过求解多项式最接近单位圆的根来估计DOA。相比于 MUSIC,Root-MUSIC具有更高的精度和分辨力[7],适合用于精准的DOA估计,而复杂度较DAS高得多,实现难度较大。总体而言,现有的DOA估计算法未能同时具备高精度和低复杂度的特点,直接应用于移动自主网中定位节点的效果并不理想。
为了解决现有定位方法难以同时达到高精度和低复杂度的问题,提出了一种新颖方法,即将DAS和Root-MUSIC进行联合DOA估计,分别用于定位过程的粗略检测和精准定位2个阶段:第1阶段的估计结果为第2阶段估计的基础,并为降低后者的复杂度服务,最终以1+1<2的复杂度获得了1+1≥2的精度。给出了该方法的实现步骤,并通过Matlab仿真实验证明了其良好的估计性能。
1 DAS和Root-MUSIC算法
1.1 阵列信号模型
假设信号源为窄带远场信号,信号到达角度为θ;采用阵元数为M的均匀线阵,阵元间距d=λ/2,λ为波长;噪声序列为零均值高斯过程,各阵元间噪声相互独立,噪声与信号也相互独立。
第i个阵元上接收到的信号的相对于第1个阵元的相移为:

第i个阵元上接收到的信号可表示为:

式中,s为信号源;n为噪声。
M个阵元接收到的信号表示为矢量的形式,即

式中,φ为信号导向矢量(steering vector);L为快拍数。
1.2 DAS算法的SDR实现
DAS的输出信号是各阵元输出的线性加权和:

式中,A为接收信号的幅值;ω为其中心频率;θ'为其随机相位;φi(θ)见式(1)。

θt为[-90°,+90°]之间以 Δθt为间隔的扫描角度,在每一个扫描角度测量输出信号的功率:

其最大值对应的角度即为信号入射方向,即

由于接收信号受高斯噪声的影响,所以式(7)的DOA估计结果包含误差。为了减小误差,对输出功率进行T次独立测量,采用最大似然估计准则估计包含噪声影响的输出功率:

由于该法的估计分辨力为Δθt,为了改善估计精度,采集空间功率谱最大值这一点及其附近几个数据点,使用最小二乘法求这些数据点的二次拟合多项式,再求使得该多项式取得最大值的角度即为DOA。
1.3 Root-MUSIC算法的SDR实现
阵列信号的协方差矩阵为:

式中,L为快拍数。
对RX进行特征分解,由小特征值对应的特征矢量张成的噪声子空间VN和信号导向矢量φ正交,即

该特性使得MUSIC空间谱产生峰值:

Root-MUSIC将式(11)的分母改写成一个关于Z的多项式:

式中,M为阵元数;Ck为矩阵C=第k条对角线上的元素之和,即
解出式(12)的2M-2个根,从其中位于单位元上的根的相位可求出DOA:

1.4 算法复杂度分析
以实现算法的过程中使用的乘法运算的个数(Number of Multiplications,NOM)作为算法复杂度的度量。
对于DAS(使用二次拟合多项式估算DOA),其NOM为:

当阵元数 M=6、快拍数L=5、扫描角度间隔Δθt=5°、二次拟合多项式的数据点数Q=5时,DAS的NOM=4830。
对于Root-MUSIC,其NOM主要集中在求RX,对RX进行特征分解及求根这3步,分别对应NOMA,NOMB及NOMC:
将式(17)、式(18)和式(19)相加,得到实现Root-MUSIC所需NOM为:

当阵元数M=6,快拍数 L=5时,Root-MUSIC的NOM=12019。而相同条件下,DAS的NOM要少得多。因此,DAS较低的复杂度使其适合用于实时粗略DOA估计;Root-MUSIC适合用于精准DOA估计,而复杂度较高,设法减少求根个数是降低复杂度的关键。
2 DAS和Root-MUSIC联合估计法
综合DAS低复杂度和Root-MUSIC高估计精度的优点,提出一种将DAS和Root-MUSIC联合估计法,实现了以较低的复杂度获得近似于单独采用Root-MUSIC所达到的高精度。该方法分为2个阶段:首先采用DAS进行粗略DOA估计。该结果为第2阶段进行精准定位的Root-MUSIC的基础,利用牛顿法[8]使Root-MUSIC仅需要求解多项式的一个根(常规Root-MUSIC需要求解2M-2个根),从而降低了Root-MUSIC的复杂度。具体过程如下:
② 求f(Zi),f(Z)见式(12);
③过这一点作多项式曲线的切线,斜率为f'(Zi);
④求切线的零点Zi+1=
⑤重复步骤②~步骤④,直至估计结果足够精确。
联合估计法中Root-MUSIC的NOM为:

当阵元数M=6、快拍数L=50时,联合估计法中 Root-MUSIC的 NOM=10742,而 DAS的 NOM=4830,二者之和NOM=15572,相比于相同条件下常规Root-MUSIC的NOM=18522要少。
3 Matlab仿真实验及性能分析
为了验证DAS和Root-MUSIC联合估计法相对于DAS和常规Root-MUSIC在性能(包括估计精度和复杂度)上的优越性,这里给出基于上述阵列信号模型的Matlab仿真实验结果及分析。将估计的均方根误差(Root Mean Square Error,RMSE)作为估计精度的度量:

式中,T为独立实验的次数;θ^i为第i次实验估计的DOA;θ为实际DOA。
实验1探讨了联合估计法中第1阶段DAS的估计精度对第2阶段Root-MUSIC的估计精度的影响。实验条件:阵元数=6,信源数=1,快拍数=50,独立实验次数=500,SNR=15 dB。仿真结果如图1所示。从图1可以看出,第1阶段DAS的RMSE达到某一门限值后会导致第2阶段Root-MUSIC的RMSE急剧增大。DOA越大,联合估计法对DAS的RMSE要求越低,只要DAS的RMSE控制在2.5°以内,就能为Root-MUSIC提供有效的估计近似初始值,最终达到理想的估计精度。
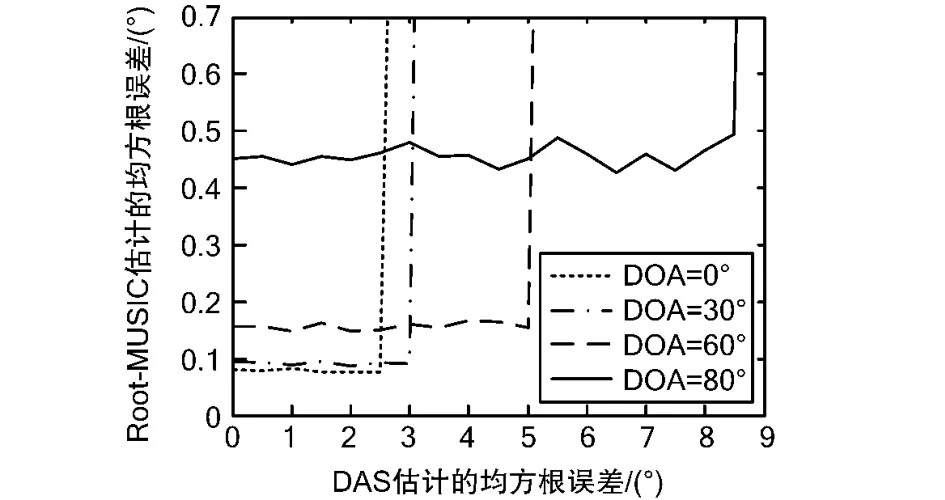
图1 联合估计法中2种方法估计精度的关系
实验2比较了DAS、常规Root-MUSIC及联合估计法的估计精度随DOA变化的趋势。实验条件:阵元数=6,信源数=1,快拍数=50,独立实验次数=500,SNR=15 dB。仿真结果如图2所示。从图2可以看出,三者的估计精度随DOA变化的趋势呈碗底状,DAS的变化趋势更为陡峭。相同条件下联合估计法和常规Root-MUSIC的RMSE几乎完全相等,和DAS的RMSE相比少一半以上。
实验3比较了DAS、常规Root-MUSIC及联合估计法的估计精度随实现的复杂度(Complexity,#of Multiplications)变化的趋势。实验条件:阵元数=6,信源数 =1,DOA=30°,独立实验次数 =500,SNR=15 dB。仿真结果如图3所示。从图3可以看出,三者的RMSE随复杂度的增大而急剧下降,直至复杂度达到某一门限值后,再增大复杂度而RMSE基本不变。为达到相同的估计精度,联合估计法的复杂度比常规Root-MUSIC的低。
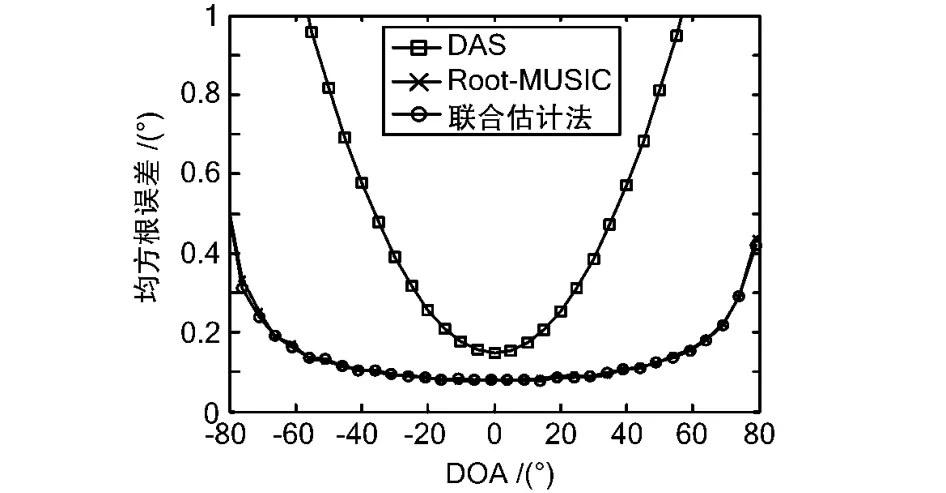
图2 3种方法的估计精度随DOA变化的趋势
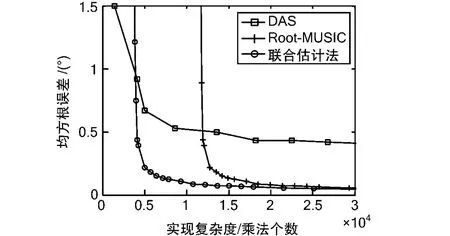
图3 3种方法的估计精度随实现的复杂度变化的趋势
实验4探讨了联合估计法在多径传播条件下的估计精度。实验条件:假设接收信号为一路非视距(NLOS)与视距(Line-of-Sight,LOS)信号的叠加,二者的到达角度差(Direction Difference)为Δθ,功率比为PNLOS/PLOS;阵元数=6,视距DOA=30°,快拍数=50,独立实验次数=500,SNR=15 dB。仿真结果如图4所示。
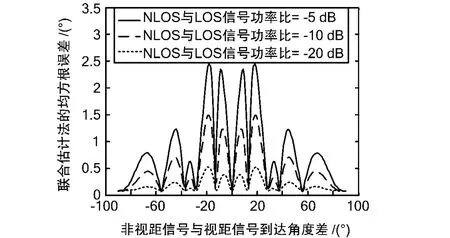
图4 联合估计法在多径传播条件下的估计精度
从图4可以看出,联合估计法的估计精度随Δθ变化的趋势呈波浪状,这是因为NLOS信号频谱的主瓣和LOS信号频谱的旁瓣相干扰,当旁瓣的能量增至足够大时就被当作主瓣,就产生较大的估计误差。
4 结束语
在分析了延迟相加法和Root-MUSIC的实现复杂度的基础上,提出了一种应用于在移动自主网的节点定位的将二者进行联合DOA估计法,实现了以较低的复杂度获得近似于单独采用Root-MUSIC所达到的高精度。该方法分为2个阶段:首先采用DAS进行粗略DOA估计;该结果为第2阶段进行精准定位的Root-MUSIC的基础,利用牛顿法使Root-MUSIC仅需要求解多项式的一个根,从而降低了估计方法整体的复杂度。仿真实验证明了其良好的估计性能。 ■
[1]GODARA L C.Application of Antenna Arrays to Mobile Communications,Part II:Beam-forming and Direction-of-arrival Considerations [J].Proc.IEEE,1997,85(8):1195-1234.
[2]ADVE R S.Direction of Arrival Estimation [R].Toronto,Canada:ECE Dept.,University of Toronto,2003:8 -14.
[3]FRATTASI S,MONTI M,PRASAD R.A Cooperative Localization Scheme for 4G Wireless Communications[C]∥San Diego,CA:IEEE Radio and Wireless Symposium,2006:287-290.
[4]杨 维,陈俊仕,李世明,等.移动通信中的阵列天线技术[M].北京:北京交通大学出版社,2005:47-48.
[5]SCHMIDT R O.Multiple Emitter Location and Signal Parameter Estimation [J].IEEE Trans.on Antennas and Propagation,1986,AP -34:276 -280.
[6]BARABELL A J.Improving the Resolution Performance of Eigenstructure-based Direction-Finding Algorithms[C]∥Boston,MA:Proc.IEEE ICASSP,1983:336 -339.
[7]AL-ARDI E M,SHUBAIR R M,AL-MUALLA M E.Performance Evaluation of Direction Finding Algorithms for A-daptive Antenna Arrays[C]∥Sharjah,United Arab Emirates:Proc.IEEE ICECS,2003:735 -738.
[8]LAND M,FRENZEL B-C.Polynomial Root Finding[J].IEEE Signal Processing Letters,1994,1(10):141-143.
猜你喜欢
数学年刊A辑(中文版)(2020年3期)2020-10-27
中国惯性技术学报(2019年6期)2019-03-04
电子制作(2018年17期)2018-09-28
智富时代(2018年8期)2018-09-28
智富时代(2018年8期)2018-09-28
中学生数理化·八年级物理人教版(2017年9期)2017-12-20
北京航空航天大学学报(2017年9期)2017-12-18
中央民族大学学报(自然科学版)(2017年2期)2017-06-11
光学精密工程(2016年3期)2016-11-07
火控雷达技术(2016年3期)2016-02-06