
水下GPS定位技术在流花 41 油田井口定位中的应用
2013-10-30 01:56张伟国李泽民畅元江陈国明
石油钻探技术 2013年3期
苏 峰, 张伟国, 李泽民, 畅元江, 陈国明
(1.中海石油(中国)有限公司深圳分公司, 广东深圳 518067;2.中国石油大学(华东)海洋油气装备与安全技术研究中心, 山东青岛 266580)
◀深水钻井完井专题▶

苏 峰1, 张伟国1, 李泽民2, 畅元江2, 陈国明2
(1.中海石油(中国)有限公司深圳分公司, 广东深圳 518067;2.中国石油大学(华东)海洋油气装备与安全技术研究中心, 山东青岛 266580)
在国内首个采用深水开发模式自营开发油田——流花 4-1 油田(LH4-1 油田)的钻井作业中,要求对水下井口精确定位和井口导向基盘方位精确控制,为满足作业要求,采用了水下GPS定位技术。该技术利用水声相对定位技术与GPS水面高精度定位技术相结合的方式,经过比较分析水声定位技术三大系统长基线定位技术、短基线定位技术和超短基线定位技术的特点,在 LH4-1 油田水下井口定位作业中选用了长基线定位系统与GPS定位系统组合形成的组合定位系统,编制了水下无线罗经和水下机器人配合下水下井口精确定位及井口导向基盘控制的详细施工程序。作业后测量表明,定位精度均满足设计要求,取得了良好的实施效果,圆满解决了 LH4-1 油田钻井水下井口精确定位及基盘方位精确控制的难题。
水下井口装置 水下定位 GPS定位 水声定位 流花 4-1 油田
1 概 述
在海上油气田勘探、开发和工程安装作业中,定位技术起着非常重要的作用,往往需要根据对定位精度要求的不同,选择使用水面定位技术或水下定位技术。GPS定位技术是目前较通用的水面定位技术,具有全天性、实时性的特点。随着水下油气田开发的不断发展,水下定位技术的应用也越来越多。水声定位技术作为一种重要的水下定位技术也广泛应用于水下井口定位、水下设施工程安装等作业中。而且,水声定位系统还可以和其他定位系统相结合形成组合定位系统,将单一定位系统的优点结合在一起,从而使定位系统的精度更高、功能更强大,通常应用最多的是GPS定位和水下机器人(remote operated vehicle,ROV)的组合。
流花 4-1 (以下简写为 LH4-1)油田是我国首个采用深水开发模式的自营开发油田,该油田位于中国南海珠江口盆地,所在海域水深260~300 m,该油田共有8口井,已有1口井完钻,需新钻7口生产井,油田开发工程方案确定为“丛式井-中心管汇”(见图1)。为满足丛式井钻井和生产设施安装的需要,定位精度要求水下井口实际位置与设计位置之间的误差小于1 m,井口导向基盘(permanent guide base,PGB)实际安装艏向与设计要求方位误差小于5°且倾斜度小于1°。为此,在充分调查研究的基础上,采用GPS定位系统与长基线水下定位系统组合形成的水下GPS定位系统,依托水下无线电罗经和ROV的支持,完成了南海流花油田丛式井各井口的精确定位、井口导向基盘的精确控制与安装等任务。
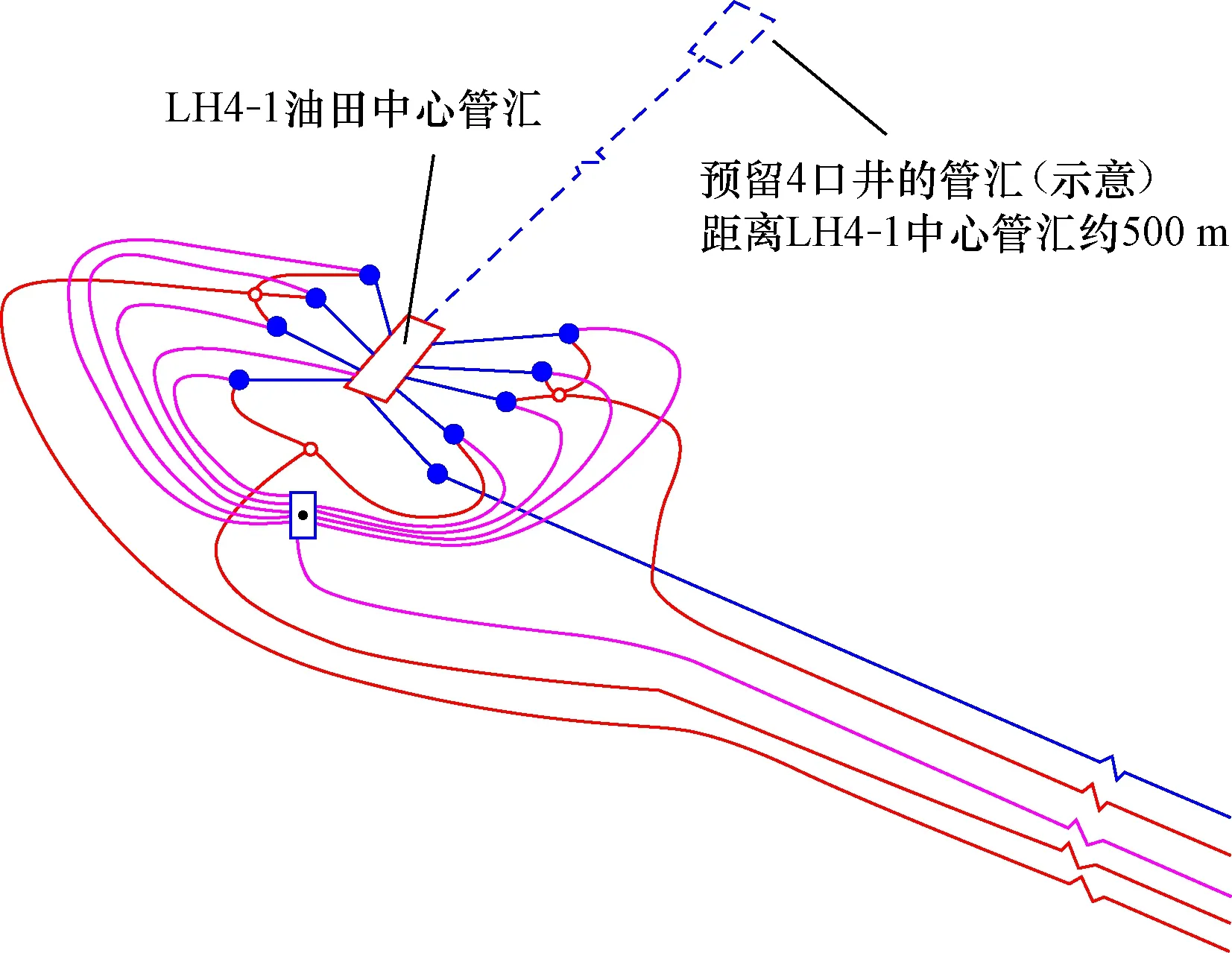
图1 LH41 油田水下井口布置方案示意Fig.1 Schematic of LH41 Oilfield underwater wellhead layout
2 水下定位技术
现有水下定位技术,按照是否需要设置声基阵,可分为水声定位技术和激光声遥感技术2大类。水声定位技术需要设置声基阵,目前应用广泛;激光声遥感技术是利用激光在水中产生声波并在空气中接收水下目标反射或散射的声波来感知水下目标,具有机动灵活、覆盖水域广的特点,但精度相对较低,应用较少。由GPS定位和水声定位相结合形成的水下GPS定位技术则是近几年发展起来的新技术,它利用水声相对定位技术将GPS水面高精度定位能力向水下延伸,使潜航器(或ROV)在工作潜深可以获得自身的经纬度坐标,且定位精度可以保证与GPS水面定位精度在同一量级[1]。
2.1 水声定位技术
水声定位技术主要包括长基线(long base line,LBL)定位技术、短基线(short base line,SBL)定位技术、超短基线(ultra short base line,USBL)定位技术[1-2]。水声定位系统的工作频率一般为18~36 kHz,工作范围为2~3 km,工作水深达到3 000 m。工作中,定位系统需要利用换能器和应答器通过对距离和角度的测量计算完成定位。
USBL系统中,应答器安装在定位目标上,船载换能器通过测量出到应答器的水平和垂直角度及斜距完成定位。它具有安装简单、操作方便、无需组建水下基线阵和测距精度高等优点,但需要做大量的校准工作,定位精度随着目标相对水深和工作水深的增加而降低。主要适用于为潜水员水下作业提供高精度定位信息(确保潜水员的安全),以及监控水下设备在较浅水域进行检测和勘探。
SBL系统中,需要在舰船上安装至少3个换能器阵,换能器之间的位置关系已知,应答器安装在定位目标上,用舰船上的多个换能器测量到同一个应答器的距离,从而计算出目标的位置。它同样具有安装简单、使用方便的特点,但是基线长度要大于40 m才能实现高精度测量,也需要进行大量的校准工作。SBL是介于USBL和LBL之间的一种系统,由于需要对船体进行改造,才能放置换能器基阵,从而使SBL的应用受到一定的限制。
LBL系统中,应答器阵列部署在海底的已知点上,水面舰只安装一个换能器,用换能器测量到水底应答器的斜距,从而计算出自身的坐标位置。它的定位精度与水深无关,精度较USBL和SBL方式定位高,多余观测值增加,对于大面积的调查区域,可以得到非常高的相对定位精度,作用范围大,用于时延、相位和频率等参数估计的水声信号处理系统和用于载体姿态修正和航迹滤波等的后置数据处理系统,测量基阵安装校准精度要求较低。但是LBL系统复杂,操作繁琐,需要长时间布设和收回海底声基阵[3-6]。该定位系统主要适用于海洋石油水下钻采、水下考古打捞等需要高精度定位的工程。
由于 LH4-1 油田施工中对ROV和水下设施的精确定位要求较高,常用的SBL、USBL水下定位系统达不到设计精度要求,经综合考虑决定选用定位精度高、作用范围大的LBL系统进行水下定位。
2.2 GPS与LBL组合定位技术
GPS定位是以卫星为基础的无线电导航定位系统,是一种全球性、全天候、连续的水面定位导航系统,具有定位精度高、速度快等特点。也是目前世界上应用最广泛、实用性最强的水面定位系统。
LBL定位系统包括安装于船上的收发器或ROV和一系列位置已知的固定于海底的应答器,应答器之间的距离构成基线,长度在上百米到几千米之间,相对USBL、SBL来讲由于基线长度较长,故称为LBL系统。
LBL定位技术所需的硬件系统如图2所示,该系统包括水面控制器、换能器、问答传感器、应答器和海底智能信标等。其中,水面控制器控制信号传输并对接收到的信息进行实时处理;换能器负责完成能量与信号的转换;问答传感器发送控制单元的命令并接收反馈的信息;应答器对问答传感器发送的命令作出相应应答;海底智能信标需预先布置于海底,为坐标推算的基点。

图2 LBL硬件系统示意Fig.2 Schematic of LBL hardware system
LBL定位系统的应用模式主要有绝对定位模式和相对定位模式2种。
1)绝对定位模式。预先在目标物周边布设海底基阵,并通过基阵校准获得各基阵信标的精确位置,然后通过测量目标物及各海底基阵信标间的相对位置进而确定目标物的绝对位置。
2)相对定位模式。在海底及需要测量相对关系的结构物上布设信标,组成一个网络,利用声学测距的方式在各个信标间进行基线采集,利用信标自带的深度传感器进行深度测量,然后利用数学模型对采集到的数据进行平差处理,进而得到结构物与结构物的相对关系。
LBL定位系统通过测量收发器和应答器之间的距离,采用测量中的前方或后方交会对目标进行定位。由于LBL定位是基于距离测量的定位技术,定位精度与水深无关[3-8]。
根据 LH4-1 油田水下井口定位精度的要求,采用了GPS水面定位与LBL水声定位结合的水下GPS 定位技术,用来精确定位水下井口位置。GPS定位选用Skyfix-XP高精度差分系统和Starfix.seis综合导航系统。
3 水下基盘方位测量与控制
水下罗经系统用来测定套管导向基座的导向桩方向和倾斜方向。它利用陀螺仪的旋动性和定轴性,并借助控制设备、阻尼设备和现代电子技术制造而成,不受铁磁物质影响,水下仍然可以保持良好的稳定性,可以在恶劣的海洋气候下进行探测打捞。水下罗经可分为有线水下罗经和无线水下罗经,有线水下罗经的电源由水面以上船舶或设施提供,无线水下罗经则由附带的电池组来提供电源。
根据作业区域的水深情况,LH4-1 油田水下基盘艏向测量选用了无线水下罗经。作业前,在PGB导向桩上指定位置安装罗经板底座,用以安装和固定水下罗经。水下罗经系统将与LBL系统信标相连后,通过LBL系统信标把罗经数据通过无线传输方式发送至船上的接收端[9]。
4 水下井口精确定位技术方案与应用
4.1 方案设计
LH4-1 油田8口井的井口布局设计方案如图3所示。
如前所述,LH4-1 油田水下井口定位的具体要求为:1)井口位置与设计位置误差小于1 m;2)井口导向基盘首向与设计方向误差小于5°,水平方向倾斜度小于1°。为实现上述定位要求,将水下定位作业分为2个阶段:第一阶段主要安装LBL信标阵列和井口沙袋,包括安装LBL和ROV系统,水下定位系统LBL布阵,对已钻的A4h井的井口位置复测、新井口的设计位置和深度确定,调查各设计井口的周围环境,新井口位置确定和沙袋放置等;第二阶段主要进行钻井平台移位和钻井支持,包括南海5号平台移位,PGB上的信标、水下罗经和斜度仪的安装, LBL信标位置的复核和ROV作业支持等。

图3 LH41 油田井口布局方案Fig.3 Scheme of LH41 Oilfield wellhead layout
4.2 定位作业
4.2.1 第一阶段作业
1)安装LBL和ROV系统。所有水面、水下定位系统和ROV安装在LBL和ROV支持船上,定位和ROV人员也动员上船,作业船驶往 LH4-1 油田施工海域工区。
2)水下定位系统LBL布阵。在拖轮到达工区后,LBL信标阵列将布设在水下井口的设计位置周围。首先把智能信标安装在特制的架子上,然后由拖轮的吊机逐个吊放在海底设计位置上。在 LH4-1 油田设计井管汇中心周围布设6个智能信标(如图4所示),智能信标布设完毕后,需要对每一个智能信标进行校准,确保其工作正常。另外,由于LBL定位技术采用声速测距,而声音在水下不同深度的传播速度有差异,为了提高校准精度,需要对声速进行校准。作业者用测速仪测量声波在水面以下不同深度的传输速度,采用平均声速计算并复核定位精度。

图4 管汇中心周围布设的信标Fig.4 Setup of beacons around center manifold
3)A4h井井口位置复测、新井口的位置设计和深度确定。ROV携带1个信标和固定架,下潜移动到已钻的A4h井井口中心,把LBL信标和固定架安装在井口中心处,通过采集一段时间的定位位置以获得该井口中心的最终位置。该信标将一直安装在该井口直至钻井结束,用于检查LBL水下定位系统的工作情况。由于已知其余各井口与A4h井井口的相对方向和距离,从而可推算各个设计井口和管汇中心的最新设计位置。
4)调查各设计井口的周围环境。ROV沿着穿过各设计井口的十字交叉线调查各设计井口的周围环境。如果有障碍物,在ROV能力范围内及时清理,防止影响后续作业;对不能清理的障碍物,应把位置反馈给导航系统以通过其他方式清理。
5)新井口位置确定和沙袋安装。确定新井口设计位置后,根据现场作业者代表的要求,ROV在LBL定位系统的导引下,移动到第一个新井口。当ROV移动到设计位置正上方时,在以该井口设计位置为圆心、半径为10 m的范围内,再次调查该设计井口周围的海底情况。确定井口和周围没有障碍物后,ROV把沙袋定向架置于设计井口中心位置,然后利用水下信标采集其位置信息。当获得的沙袋定向架中心点位置在井口设计位置精度范围内时,ROV将把沙袋定向架置于井口设计位置(如图5所示)。

图5 沙袋定向架安装示意Fig.5 Schematic of sandbag frame installation
随后,ROV把4个沙袋投放在沙袋定向架的4个角,然后ROV把沙袋定位架吊离,吊离后海底只保留4个沙袋用以确定井口位置。吊离沙袋定位架时,不挪动沙袋,一旦挪动将导致井口位置发生变化,且需要重新安装定位架和沙袋(如图6所示)。LH4-1 油田有7口井要安装定向架和沙袋,每口井安装4个沙袋,共需28个沙袋。28个沙袋投放结束后,即可开始第二阶段的施工。
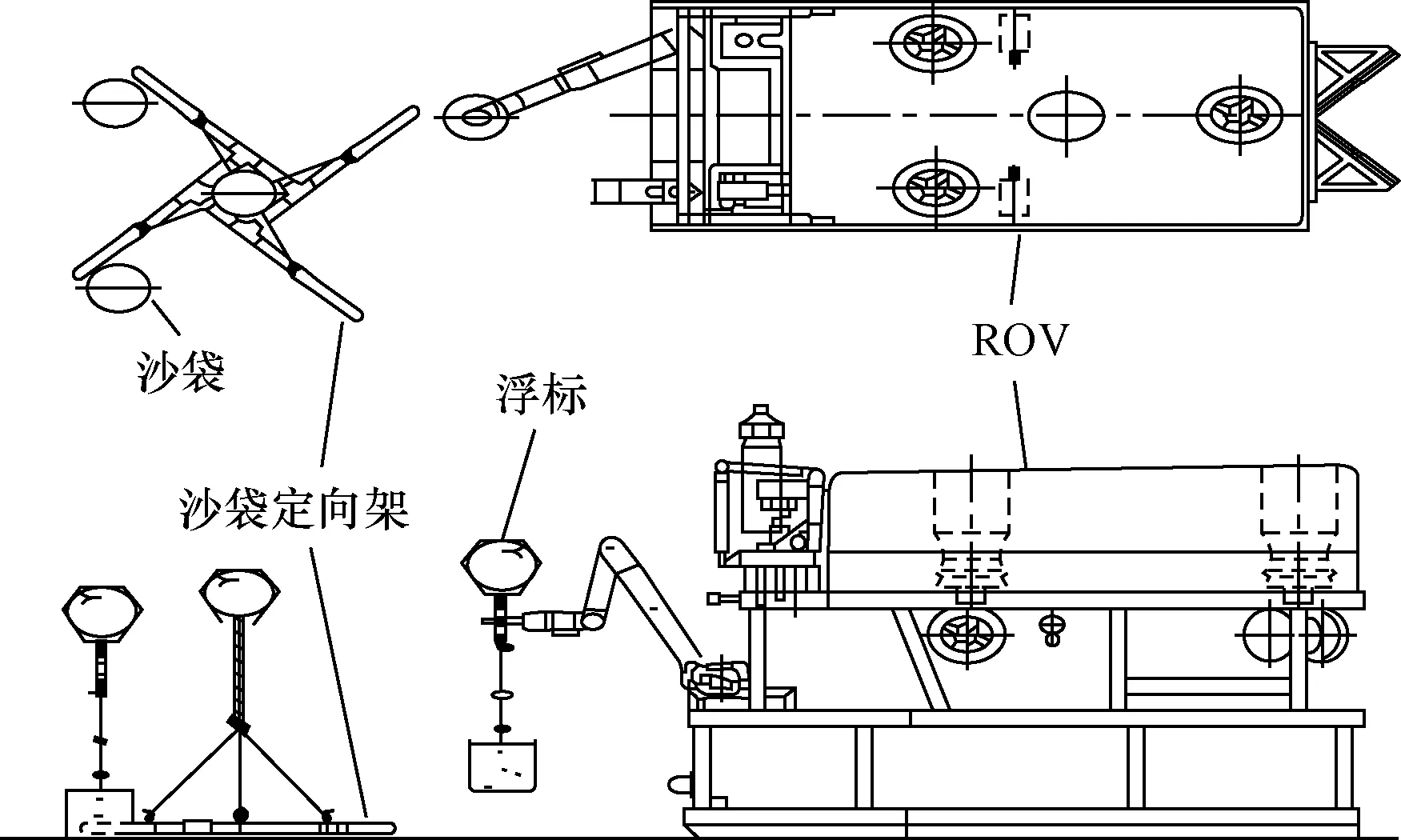
图6 沙袋安装示意Fig.6 Schematic of sandbag installation
4.2.2 第二阶段作业
1)南海5号平台移位。LH4-1 油田钻井选用南海5号半潜式钻井平台。平台移位之前,水面定位设备和拖轮跟踪系统安装在南海5号上。检查所有设备工作正常后,南海5号在定位导航系统的导航下就位于 LH4-1 油田水下管汇中心设计位置的上方海面上,然后通过抛锚定位系统把各个锚准确抛到设计位置上。抛锚过程中,不要让锚链触碰海底的沙袋和LBL信标。平台就位后进行压载,压载后进行锚链调整,最终完成平台移位。
2)PGB上的信标、水下罗经和倾斜仪安装。在PGB下水之前,将2个LBL信标(带测深感应器)、1个水下罗经和倾斜仪安装和固定在PGB上,然后测量2个LBL信标的安装位置,并校准水下罗经和倾斜仪,确保测量精度。
3)LBL信标和第1口井沙袋。平台移位完成后,需要立即检查井口周围的信标,确保信标工作正常且位置没有发生变化。另外,ROV还需要检查并确认沙袋也没有移动。
4)水下定位作业和ROV作业支持。当PGB下水后,首先确认2个LBL信标、1个水下罗经和倾斜仪正常工作,并用ROV确认钻头伸出套管的长度,然后慢慢下放PGB和套管。当钻头下放至泥面以上0.5 m时暂停下放,用ROV读出位于PGB上的3个倾斜仪的读数,用以准确测定PGB的位置和倾斜度以及钻头的位置等。调整钻头位置至设计井口位置的正上方,并控制倾斜仪的读数小于0.5°后,即可进行钻井作业。
钻井过程中,LBL定位和测量系统将持续监测PGB的方向和倾斜度等,钻至设计深度后,再次确认上述监测数据是否满足设计要求。当该井表层钻井与PGB的安装结束以后,ROV移动到下一个设计井口位置重复进行上述工作,完成下一口井的定位及表层钻井作业。
4.3 定位技术应用效果
在水下无线罗经和ROV的支持下,通过应用LBL水下定位技术,LH4-1 油田最终成功完成7口井的钻井作业和PGB水下安装的定位作业任务,水下井口和PGB的实际安装情况与设计情况的误差见表1。
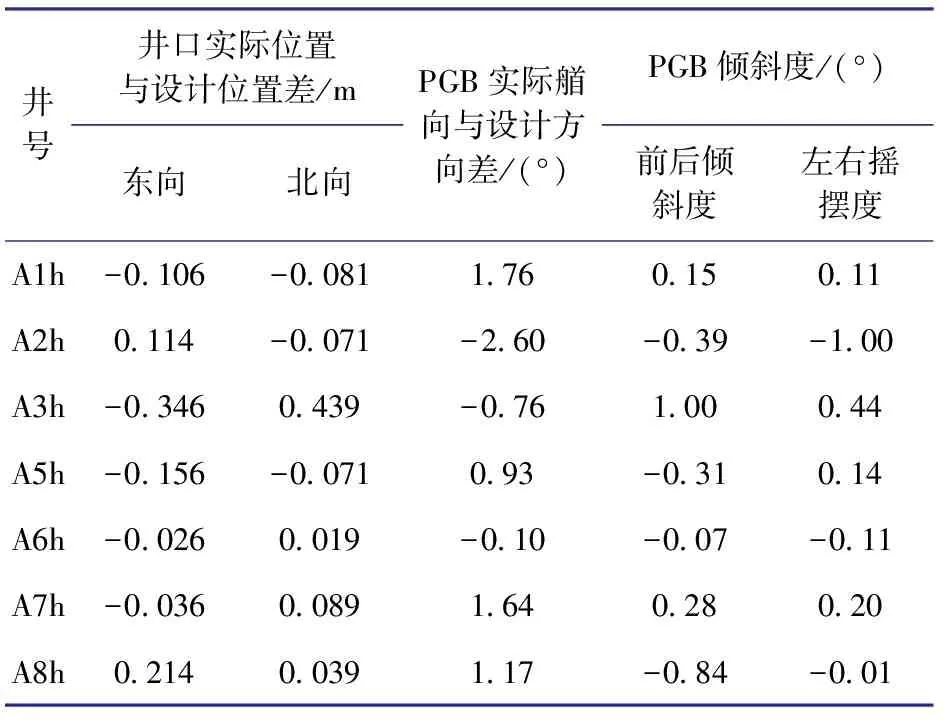
表1 井口和PGB实际安装与设计情况的误差
由表1可知,井口定位中最大误差发生在A3h井,井口实际位置与设计位置之间的误差为0.439 m,小于定位精度要求的1 m;PGB实际艏向与设计方向最大误差发生在A2h井,其值为2.60°,小于艏向精度要求的最大误差5°;PGB倾斜度最大为1.00°,未大于PGB倾斜度的最大误差要求。综上,LH4-1 油田水下丛式井口的钻井与水下安装顺利完成,施工作业的定位精度均满足设计要求,水下定位取得良好的应用效果。
5 结束语
在流花 4-1 油田的开发方案设计中,提出了对水下井口精确定位和井口导向基盘方位精确控制的要求,采用长基线水下定位结合GPS高精度水面定位的水下GPS定位技术,选用水下无线罗经控制导向基盘艏向,成功解决了水下井口精确定位和基盘方位精确控制的难题。水下GPS定位技术在该项目的成功应用,为深水勘探、开发及工程安装的精确定位作业提供了较完备的技术方案,积累了作业和管理经验,可供深水钻井中进行类似作业时借鉴。
[1]孙树民,李悦.浅谈水下定位技术的发展[J].广东造船,2006(4):19-24.
Sun Shumin,Li Yue.An introduction to the development of underwater positioning technology[J].Guangdong Shipbuilding,2006(4):19-24.
[2]李守军,包更生,吴水根.水声定位技术的发展现状与展望[J].海洋技术,2005,24(1):130-134.
Li Shoujun,Bao Gengsheng,Wu Shuigen.A practical overview and prospect of acoustic positioning technology[J].Ocean Technology,2005,24(1):130-134.
[3]刘俊.长基线水下导航定位技术研究[D].哈尔滨:哈尔滨工程大学信息与通信工程学院,2007.
Liu Jun.Research on long base line underwater target navigation and orientation[D].Harbin:Harbin Engineering University,School of Information and Communication Engineering,2007.
[4]吴永亭,周兴华,杨龙.水下声学定位系统及其应用[J].海洋测绘,2003,23(4):18-21.
Wu Yongting,Zhou Xinghua,Yang Long.Underwater acoustic positioning system and its application[J].Hydrographic Surveying and Charting,2003,23(4):18-21.
[5]孙宝江,曹式敬,李昊,等.深水钻井技术装备现状及发展趋势[J].石油钻探技术,2011,39(2):8-15.
Sun Baojiang,Cao Shijing,Li Hao,et al.Status and development trend of deepwater drilling technology and equipment[J].Petroleum Drilling Techniques,2011,39(2):8-15.
[6]单瑞,赵铁虎,梅赛,等.深海拖曳系统定位技术及其应用与展望[J].海洋地质前沿,2012, 28(7):66-70.
Shan Rui,Zhao Tiehu,Mei Sai,et al.Positioning technology for deep tow system:application and perspective[J].Marine Geology Frontiers,2012,28(7):66-70.
[7]江南,黄建国,李姗.长基线水下目标定位新技术研究[J].仪器仪表学报,2004,25(4):77-80.
Jiang Nan,Huang Jianguo,Li Shan.A new long base line underwater positioning technique[J].Chinese Journal of Scientific Instrument,2004,25(4):77-80.
[8]田坦.水下定位与导航技术[M].北京:国防工业出版社,2007:62-93.
Tian Tan.The underwater positioning and navigation technology[M].Beijing:National Defence Industry Press,2007:62-93.
[9]李孟林.水下目标精确定位系统的研究[D].大连:大连海事大学信息科学技术学院,2011.
Li Menglin.Underwater target precisely positioning system[D].Dalian:Dalian Maritime University,School of Information Science and Technology,2011.
SuFeng1,ZhangWeiguo1,LiZemin2,ChangYuanjiang2,ChenGuoming2
(1.ShenzhenBranchCompany,CNOOC,Shenzhen,Guangdong,518067,China;2.CenterforOffshoreEngineeringandSafetyTechnology,ChinaUniversityofPetroleum(Huadong),Qingdao,Shandong,266580,China)
During drilling operation of the first independently operated deep water oilfield—LH4-1 Oilfield,precise positioning of underwater wellhead and precise control of the permanent guide base azimuth were needed.In order to meet this requirement,underwater GPS positioning technique was adopted,which combines water sonic and GPS positioning.long base line system and GPS positioning system were selected in the underwater positioning operation of LH4-1 through the comparison among long base line system,short base line system and ultra short base line system.Detailed precise positioning procedure with the support of underwater wireless gyro and remote operated vehicle were set up.In the positioning application in LH4-1 Oilfield development,all the requirements of precise positioning and azimuth control were satisfied.
underwater wellhead;underwater positioning;GPS positioning;acoustic positioning;Liuhua 4-1 Oilfield
2013-03-01;改回日期2013-05-01。
苏峰(1974—),男,河南周口人,1997年毕业于江汉石油学院钻井工程专业,工程师, 现从事深水海洋油气钻井技术与项目管理工作。
联系方式:(0755)26022481,sufeng@cnooc.com.cn。
国家科技重大专项子课题“深水钻完井工程技术”(编号:2011ZX05026-001-05)、教育部“长江学者和创新团队发展计划”项目“海洋油气井钻完井理论与工程”(编号:IRT1086)、中央高校基本科研业务费专项资金资助项目(编号:11CX05009A)资助。
10.3969/j.issn.1001-0890.2013.03.008
TE951
A
1001-0890(2013)03-0040-06
[编辑 令文学]
猜你喜欢
发明与创新(2021年31期)2021-07-22
船海工程(2021年1期)2021-03-02
中国船检(2020年10期)2020-11-07
恋爱婚姻家庭·养生版(2020年3期)2020-04-13
工程与建设(2019年5期)2020-01-19
铁道通信信号(2018年3期)2018-04-19
中国惯性技术学报(2017年1期)2017-06-09
中国惯性技术学报(2017年1期)2017-06-09
小学生·新读写(2016年9期)2016-11-14
长春理工大学学报(自然科学版)(2015年4期)2015-12-07
