新一代多普勒天气雷达远程控制器
2013-12-07 06:50林忠南张伟红陈荣华
浙江气象 2013年1期
林忠南 张伟红 徐 才 陈荣华
(舟山市气象局,浙江舟山316021)
0 引言
次,多的达到4~5次。这些小故障经常只需手动重启RDASC计算机,或伺服计算机、伺服总电源就可以解决。为此,舟山站自行研制了远程控制器,实现了RDASC计算机、伺服计算机、伺服总电源等的远程控制,一些相关的停机故障无须上雷达站就能解决,使CINRAD达到了无人值守的要求。
1 控制器结构原理
1.1 控制器原理框图(图1)
控制器主要由隔离器、锁存器、缓冲器、驱动器、继电器或电子开关组成。
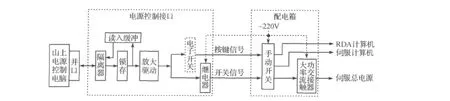
图1 控制器原理框图
新一代多普勒天气雷达(CINRAD)是一种具有全遥控功能的雷达,理论上可以实现无人值守。但强大的功能不可避免的使雷达软硬件都更加的复杂化,从而导致雷达的稳定性、可靠性难以达到无人值守的要求。特别是CINRAD至今仍存在一些经常反复发生的小故障,更是给实现无人值守带来极大的障碍。
经过统计,我们发现绝大多数的CINRAD停机故障都是一些小故障,主要发生在RDASC计算机通讯和伺服控制部分,最常发生的是“天线座I/O错”,舟山市气象雷达站每月都有2~3
1.2 控制器方案
控制器功能简单,对响应速度也没有很高的要求,但考虑到天气雷达的重要性,控制器必须非常稳定可靠,因此我们排除了相对较为复杂的采用单片机的制作方法,直接采用计算机作为通讯和控制软件的工作平台。
在近距离、低速通讯和控制接口数量少的情况下,并口通讯比串口通讯、USB通讯更为简洁可靠,不需要昂贵的专用设备就可以开发制作,控制软件也相对简单。因此选择计算机的并口作为控制器的通讯接口。而且空出来的两个串口还可以用于CINRAD测试时的“天控模拟”和“DAU模拟”,一举两得。
1.3 控制器组成
1.3.1 接口隔离
由于计算机并口约有20 mA的输出电流(数据口、控制口接TLP521光耦后,实测输出电流约11 mA),状态口输入端内有上拉电阻,因此可以直接在并口的输入、输出端口串接光耦,无须再在光耦与并口间外加电源,使计算机与控制器后续部分达到了完全的隔离,提高了控制器的抗干扰能力和安全性。
不同的计算机并口的输出电流可能会有所不同,为保证光耦的正常工作,可调整输出端口与光耦间的限流电阻,把电流控制在一定范围。对于TLP521系列光耦,可控制在5~10 mA,即保证工作,又可延长工作寿命。
1.3.2 数据接口
计算机并口在EPP模式下,其端口可分为8路双向数据口(第2—9脚)、4路控制输出口(第1,14,16,17 脚)、5 路状态读入口(第 15,13,12,10,11脚),第18—25脚为公共接地端(如表1)。控制器用了其中的16路,即8路双向数据口、4路控制输出口、4路状态读入口。
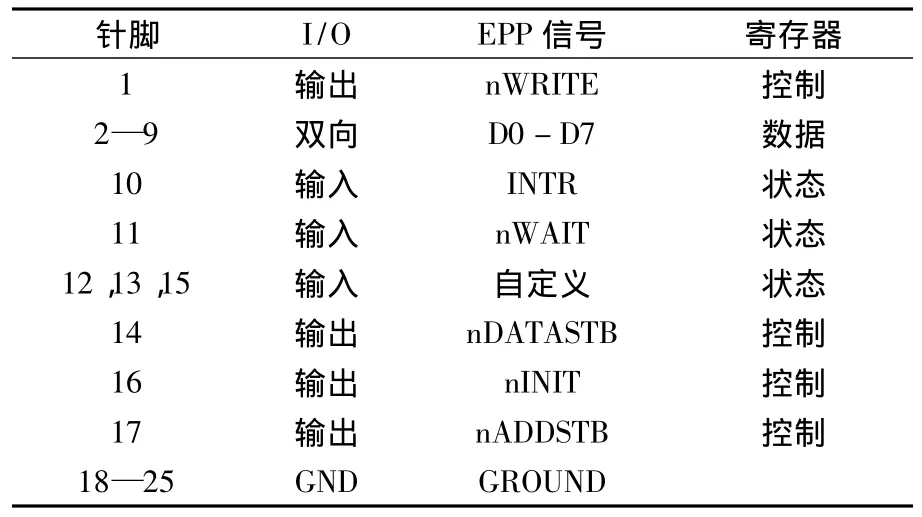
表1 EPP模式并口针脚定义
用并口的8路数据端口输出雷达设备控制信号,可以同时控制八路电源或按键信号,足够CINRAD的控制要求。如果有更多的控制需求,则可以复用并口的8路数据端口。
用并口的4路控制端口输出3位的锁存控制编码信号和一位的译码器使能信号,通过3~8译码器控制锁存器和缓冲器,输出、读入雷达设备控制信号。与直接控制相比,用编码方式不但提高了控制器的抗干扰性,而且使控制器具有很大的扩展性。如果不考虑控制命令的验证,可以输出64路的控制信号。
用并口的4路状态输入端口读入当前雷达设备控制信号状态。状态读入采用时分复用方式,通过控制缓冲器的选通,分两次读入8位的当前雷达设备控制信号状态,并与输出控制命令作比较,监测控制器是否工作正常。进一步提高了控制器的可靠性。
1.3.3 其它主要器件
放大驱动采用达林顿管驱动器uln2803,包含8个NPN达林顿管,高耐压,输出电流达500 mA,可直接驱动小型继电器。与晶体管相比,大大简化了电路,降低了故障率。
继电器采用负载为交流220 V-10 A、控制电压为5或12 V的小型通用功率继电器。如果控制信号是小电流直流信号,比如按键信号,则可换用电子开关,以改善输出控制信号的波形和响应速度。
伺服总电源是大电流的三相电源,因此在继电器后再加一个三相交流接触器。
在各继电器和交流接触器上并联手动开关,使得在雷达不停机情况下,就可以随时把控制器从雷达系统中脱离,进行维护检查,保证了气象探测的连续性。
手动开关和交流接触器电压高、电流大,而且体形较大,因此安装在专用的配电箱内,进一步提高了设备的安全性和可操作性。
1.4 控制器外部连接框图(图2)
位于雷达站的控制器一端连接需控制的雷达设备电源或按键信号,另一端连接专用的计算机。山下遥控计算机只要通过遥控软件,控制的专用计算机,就可以对与其相连的控制器进行操作,从而控制相关的雷达设备。
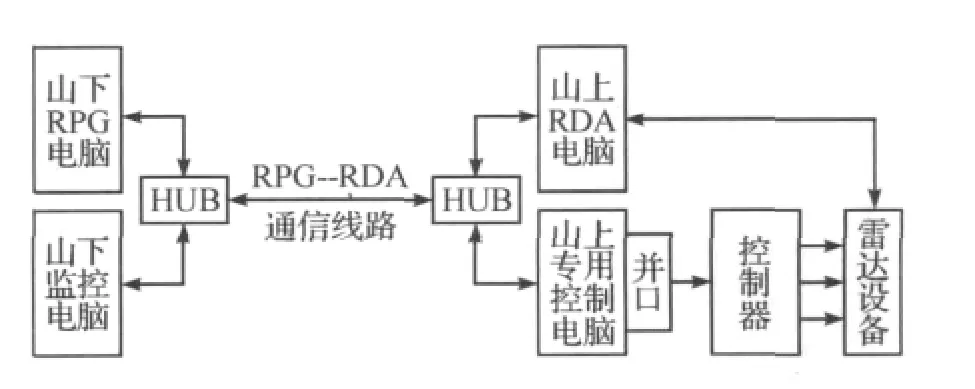
图2 控制器外部连接框图
2 控制器相关软件
2.1 遥控程序
遥控程序可随意选择流行的成熟产品,但由于遥控程序是复用从CINRAD的RPG计算机和RDASC计算机之间的通讯线路,必须保证不能影响正常的雷达数据传送,因此遥控程序应该选择占用带宽少的。舟山站采用的是PCANYWHERE10,这款产品数据量小、CPU占用率低、操作简洁、功能丰富,经实际检测,可同时应用于RDASC计算机的远程控制。
2.2 控制程序
2.2.1 并口操作
控制程序工作前需要确认计算机BIOS中的并口设置,并口通常可以选择使用3BCh,378h和278h这3个基地址,工作模式可选EPP模式或EPP+ECP模式。基地址对应并口的数据寄存器,基地址+1对应并口的状态寄存器,基地址+2对应并口的控制寄存器。控制程序就是通过虚拟驱动程序读写这3个寄存器,与控制器进行通讯,控制继电器动作,从而控制相应的雷达设备。
2.2.2 虚拟驱动程序
虚拟驱动程序可选用WINIO,WINIO是一个全免费的、无需注册的、含源程序的端口操作驱动程序组件。它能在VB,DELPHI,VC等其它环境下使用,性能特别优异。
2.2.3 控制程序界面如图3。
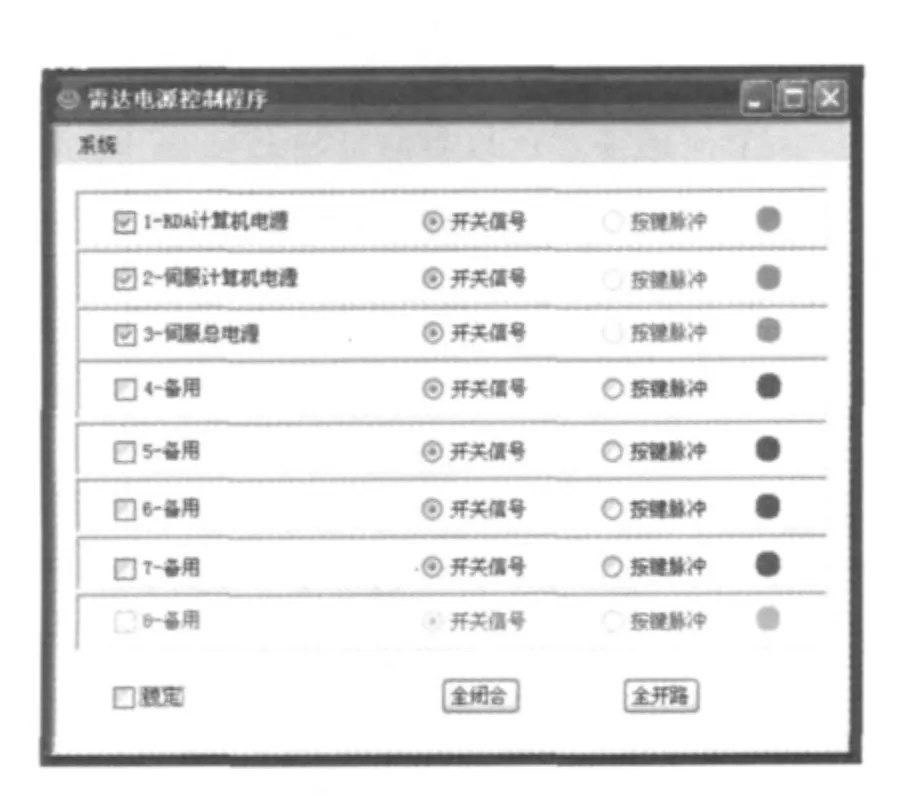
图3 控制程序界面
2.2.4 控制程序主流程如图4。
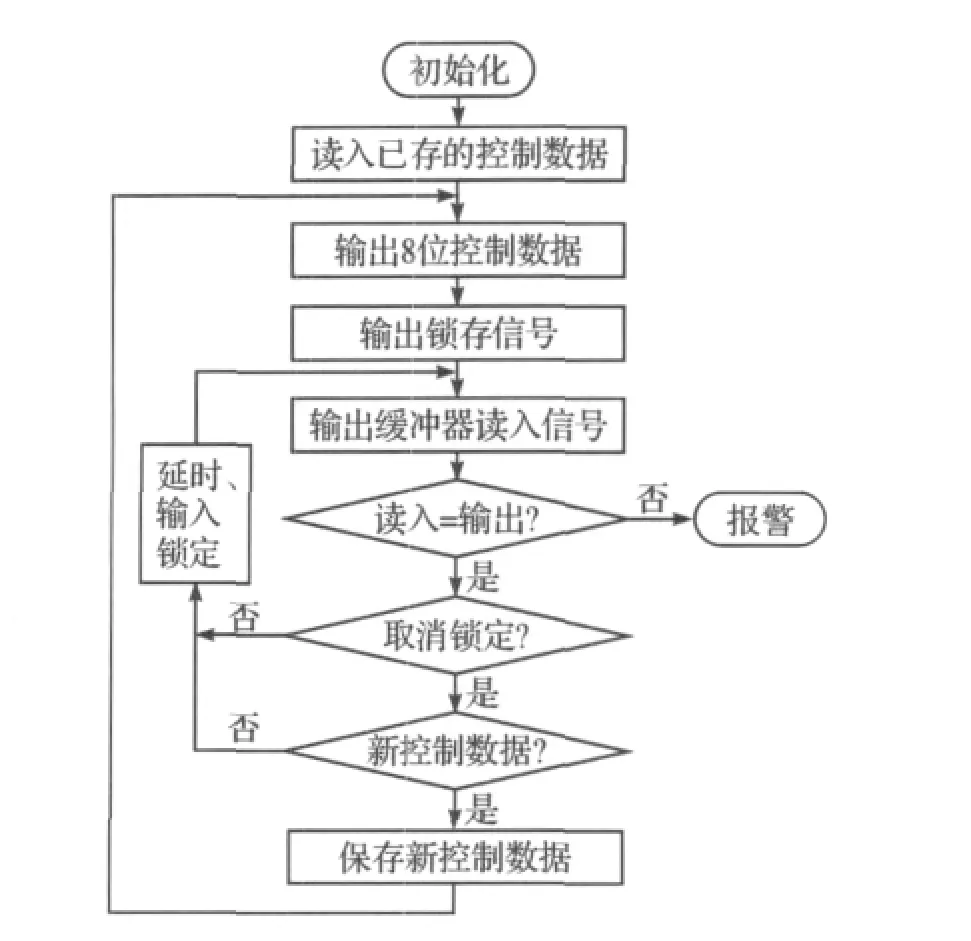
图4 控制程序主流程
3 结语
采用并口通讯的控制器简洁可靠,在舟山站一年多的业务使用过程中,雷达发生的“天线座I/O错”等数十次无法自动恢复的故障,都成功地通过控制器远程遥控解决,大大减少了上雷达站维护的次数和雷达的故障时间。控制器稳定可靠,故障率为0,很好地保障了舟山站雷达在遥控操作下的正常运行,有较好的推广和应用价值。
[1] 徐善荣.计算机接口技术[M].湖北:武汉理工大学出版社,2004.
[2] 王达.计算机网络远程控制[M].北京:清华大学出版社,2003.
猜你喜欢
小学生优秀作文(低年级)(2021年11期)2021-12-06
西安航空学院学报(2021年1期)2021-07-24
科学家(2021年24期)2021-04-25
汽车电器(2020年4期)2020-04-23
铁道通信信号(2020年8期)2020-02-06
电子制作(2019年13期)2020-01-14
铁道通信信号(2019年11期)2019-05-21
语文世界(小学版)(2019年2期)2019-02-24
铁道通信信号(2018年11期)2019-01-19
小天使·一年级语数英综合(2014年7期)2014-06-26