
基于误差扩张的MRAC及其在单元机组中的应用
2013-12-07 01:10郑宏亮
山东电力高等专科学校学报 2013年6期
谷 幸 郑宏亮
华北电力大学 河北 保定 071003
0 引言
众所周知,在控制对象日趋复杂的今天,建立系统精确的数学模型需要耗费很大的代价,并且随着控制环境的变化,系统参数不可避免的产生漂移,从而使得以精确数学模型为基础的传统PID控制的应用受到很大局限,自适应控制能够很好的解决对象具有慢时变参数时系统的控制问题。迄今为止,自适应控制已经在很多领域有较为广泛的应用,本文将基于误差扩张的MRAC自适应算法应用于单元机组的协调控制,达到了期望的控制效果。
1 模型参考自适应控制的理论基础
1.1 相对阶为1时控制器的设计及自适应律
为此基于稳定性理论的自适应控制得到了很好的发展前景。其中基于李亚普诺发稳定性的自适应控制发展很快。除了增益自适应控制方案较为简单外,当被控对象的动态特性不符合理想特性时,为了实际应用的需要,引入了辅助信号发生器。它可以很好地解决当被控对象的相对阶为1时控制器在保证系统稳定性的同时完成对参考模型的跟踪。其原理图如下图1:

图1 控制器原理图


辅助信号发生器1的维数为n-1,有n-1个可调参数,其输入为被控对象的输入u。
辅助信号发生器2的维数为n-1,有n个可调参数,其输入为被控对象的输出yp。
加上自适应增益Kc,系统共有2n个可调参数。
1.2 基于误差扩张的MRAC的控制原理
当被控对象的相对阶为2时,由于参考模型与被控对象有相似的结构,所以参考对象的相对阶也为2,不满足严格正实性。为了保持控制器的结构不变,提出了基于误差扩张的MRAC。这种方法的基本思想是考虑与参数误差Δθ相关的所谓增广误差ε(t),这种相关比跟踪误差与参数误差之间的关系更为符合要求。
首先,定义辅助误差η(t)如下:

辅助误差有两个有用的性质:首先,可以在线计算,因为估计参数向量θ和信号向量φ均可以量测到;其次,这种误差的产生是由于估计参数的时变性。
意味着以下式子成立

现在把增广误差ε(t)定义为跟踪误差e(t)和辅助误差η(t)的组合:

其中:ω=Wm[φ]
2 单元机组的自适应控制及其仿真
本文所研究的直流锅炉发电机组为三输入三输出机组模型,即:输入为燃料量B汽机阀门开度U和给水量;输出为机组输出功率N,汽机压力P和中间点焓值H,机组模型简化为

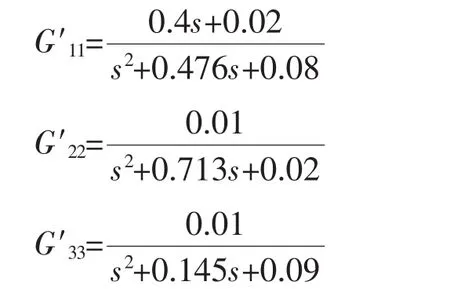
对此模型进行解耦,将其解耦成三个单变量控制系统,然后再针对每个单变量系统进行控制器的设计,本文采用串联前馈补偿法对该协调控制系统解耦,得到三个单变量控制系统:
选定的主汽压,输出功率和中间点焓值的参考模型分别为:


其中主汽压控制系统的相对阶为1,用传统的Narendra自适应控制方案进行控制;输出功率和中间点焓值控制系统的相对阶为2,采用基于误差扩张的MRAC方案进行自适应控制。自适应步长均取γ=1仿真结果如下图2、3、4:

图2 主蒸汽压力控制系统跟踪误差
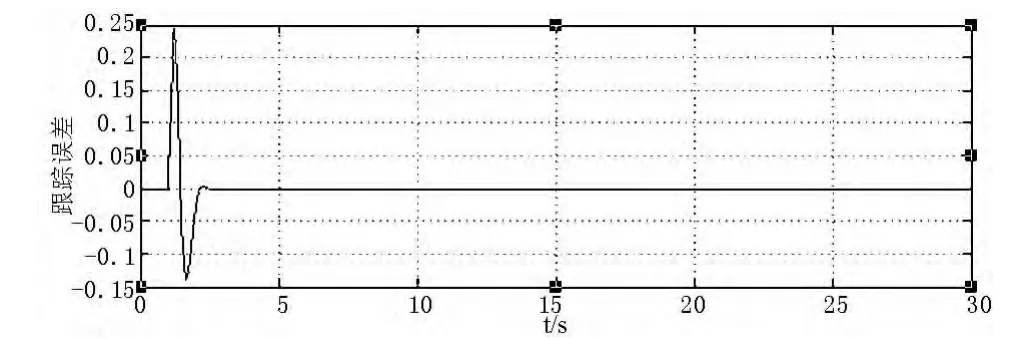
图3 输出功率控制系统跟踪误差

图4 焓值控制系统跟踪误差
3 结论
通过以上仿真结果可以得知,当被控对象的相对阶为2时,基于误差扩张的MRAC自适应控制能够很好地实现可调系统对参考模型的完全跟踪,进而这一控制方法可以在单元机组协调控制过程中对由于系统环境变化而造成的被控对象的参数漂移有较为实用的控制作用。
[1]赵国良,姜仁峰.自适应控制与应用[M].北京:人民交通出版社,2001.
[2]韩增晋.自适应控制[M].北京:清华大学出版社,1987.
[3]刘兴堂.应用自适应控制[M].西安:西北工业大学出版社,2002.
[4]李清泉.自适应控制系统理论设计与应用[M].北京:科学出版社,1990.
[5]Narendra K.S.and Annaswamy AM.,Stable Adaptive Systems,Prentice-Hall,1989.
[6]Landau I.D.,Adaptive Control-The ModelReference Approach,Marcel Dekker Inc.,1979.
[7]Whitaker,H.P.,Yamron,and Kezer,A. (1958),Design of model-reference adaptive control-Systems for aircrafe,Repore R-164,Instrumentation Laboratory,MIT,Cambridge.
[8]parks,P.C.(1966),Lyapunov redesign of model reference adaptivecontrol systems,IEEE Trans.Automat.Control.,AC-11,No.4,pp.362-367.
[9]Monpoli,R.V. (1974),Model reference adaptive control with an augmented signal,IEEE Trans.Automat.Control.,AC-19,No.5,pp.474-484.
[10]Narendra,K.S.and Lin,Y.H. (1980),Stable discrete adaptive control,IEEE Trans,Automat.Control.,AC-25.No.3.pp.456-461.
猜你喜欢
环球时报(2020-08-11)2020-08-11
机电工程技术(2018年10期)2018-12-06
军事运筹与系统工程(2016年3期)2016-09-26
电脑知识与技术(2016年10期)2016-06-16
自动化学报(2016年8期)2016-04-16
西北工业大学学报(2015年1期)2016-01-19
哈尔滨师范大学自然科学学报(2015年6期)2015-04-23
哈尔滨师范大学自然科学学报(2015年6期)2015-04-23
锻压装备与制造技术(2013年1期)2013-06-29
重庆理工大学学报(自然科学)(2012年5期)2012-07-06
