跳高技术的三维跟踪扫描影像分析方法
2014-01-04 06:10艾康伟毕致远
成都工业学院学报 2014年4期
艾康伟*,毕致远,韩 旭
(国家体育总局体育科学研究所,北京 100061)
跳高技术的分析与诊断通常采用的是三维定点影像分析的方法,应用此方法的研究论文存在以下问题。1)绝大多数文章重点分析和研究跳高的起跳和助跑倒3步的技术动作,也就是说仅仅对跳高技术动作的某一技术环节进行分析研究,缺乏对跳高技术动作全过程的全面分析[1-3];2)上述现象的产生是由于研究手段的限制。目前,采用三维定点影像分析的方法来获取运动员的运动学数据[4-6],此方法若要拍摄运动员助跑、起跳和过杆技术的全过程,则运动员在所拍摄的图像中的成像会很小,这样经过数据解析得到的结果的误差很大,从而影响分析结果的可靠性。
本文结合对我国优秀女子跳高选手郑幸娟在训练条件下试跳1.85 m测试分析过程研究三维跟踪扫描录像分析方法,重点探讨此方法的分析流程和采集三维运动学参数对分析运动技术的作用,对跳高技术暂不分析。
1 三维跟踪扫描影像分析方法(Pan Tilt&Zoom)简介
三维跟踪扫描录像分析方法就是根据特殊的标定手段对较大范围的空间进行三维标定,在使用摄像机拍摄运动员的技术动作时摄像机在可以跟踪运动目标同时也可以变焦,以捕获尽可能大的运动物体图像,通过具有三维跟踪扫描功能的三维影像分析系统解算得到运动物体的实际三维空间的坐标[7]。
在国内,常用的三维影像分析系统有德国的SIMI°Motion,美国的 Peak和 Arial等,其中德国的SIMI°Motion系统具有跟踪扫描的功能模块,其算法采用了Volker Drenk(1994)研究Pan/Tilt/Zoom算法[8]。此算法首先要求在运动空间根据需要放置若干个控制球,并精确地测量得到其在标定框架所确定的坐标参考系的三维坐标;其次在拍摄运动录像时,至少要保证2个以上的控制球在所拍摄的运动图像中可视。在这样的前提下,使用SIMI°Motion系统的跟踪扫描的功能模块就可以实现对运动物体的三维空间坐标的数据采集,进而对运动员在较大空间完成的技术动作进行三维运动学的分析和诊断。
2 测试方法
2.1 附加控制球放置与空间坐标测量
首先将标定框架放置在跳高架前,框架坐标系的X轴与跳高架垂直并指向海绵包方向,Y轴方向与横杆平行,Z轴垂直于地面。根据背越式跳高技术特点,在助跑路线的外侧放置了12个附加控制球,在跳高架上安放了4个控制球,其中第12号控制球放置在地面上,其目的是可将坐标参考系平移到地面。所放置的共计16个控制球经过摄像机的取景验证确保所拍摄的每幅画面中至少有2个附加控制球可视。标定框架和附加控制球的放置如图1所示。
使用Topcon GPT-3002N全站仪,笔记本电脑和“控制点测量与坐标转换软件系统”对16个附加控制球的三维坐标进行观测测量,并将其在站坐标系中的坐标转换到标定框架所定义的坐标参考系中[9],如表1 所示。
2.2 运动视频的拍摄和解析
使用2台数码摄像机(索尼DCR-HC52E,松下NV-GS55)首先拍摄标定框架,然后在训练条件下跟踪扫描拍摄我国优秀女子跳高选手郑幸娟(身高184 cm,体重60 kg)试跳1.85 m成功和失败各1次,拍摄频率25帧/s。
使用具有跟踪扫描解析功能的SIMI°Motion三维影像分析系统对所拍摄的运动图像进行解析。解析的过程与三维定点的影像解析过程基本相同,所不同的是每幅画面要对至少2个附加控制点进行解析,并输入对应三维空间坐标数值(见表1),系统就会自动计算出每台摄像机的P/T/Z参数。身体模型采用汉纳范(Hanavan)人体模型,并以此计算环节和身体总重心的运动学参数。使用截断频率为6Hz的数字低通滤波平滑方法对原始数据进行处理,并可合成得到解析点的三维空间坐标。
2.3 坐标参考系统的平移和旋转
解析所得到的三维坐标数据是在标定框架所定义坐标系下的坐标数据。由于标定框架安放在三角架上,所以框架坐标系的原点距地面有一定的高度,框架坐标系XOY平面未必与水平面平行,因此数据还要经过二次计算处理(如身体重心的高度等)才能得到分析所需的数据,而且会产生所得到的数据与实际不符的情况。上述问题,可以应用SIMI°Motion系统的坐标系平移和旋转功能来解决。首先,要确定坐标系的平移参数和旋转参数。
在测试实验中,在地上放置一个控制球(12),球心在框架坐标系中的坐标为(2.234,-1.443,-0.437)(参考表1),球的半径为0.035m,右跳高架的基座在XOY平面的坐标为(2.15,-0.31),将框架坐标参考系的原点平移到(2.15,-0.31,-0.437),就可将坐标参考系的原点平移到地平面上,并且在右跳高架的基部,建立新的坐标参考系。

表1 附加控制球在标定框架定义参考系中的坐标
由表1可知,控制球1到11在框架坐标系X方向上的距离有16 m,高度的变化有40 cm之多,这说明框架坐标系XOY平面与水平面不平行。应用“控制点测量与坐标转换软件系统”的置平参数计算功能,计算得到框架坐标系的XOY平面绕Y轴顺时针旋转0.962°就可使框架坐标系XOY平面与水平面平行。

图2 坐标参考系置平前后重心高度的对比
图2是坐标参考系置平前后的对比图,实线和虚线分别代表置平前后运动员身体重心相对于地面的高度变化。由图2可知,经坐标参考系置平处理后的身体重心高度曲线可真实地反映运动员重心变化的情况。这提示我们,在进行大范围三维运动分析时,标定空间坐标参考系的XOY平面未必与水平面平行,若不进行置平处理,所得到的数据就有可能与实际情况不符,依此数据就有可能得到错误的分析结果,所以坐标参考系置平处理是保证数据准确可靠的重要步骤之一。
3 测试数据与讨论

图3 新坐标参考系下郑幸娟试跳1.85 m成功的全程三维棍图
图3是应用三维跟踪扫描录像分析的方法得到的郑幸娟试跳1.85 m成功全程技术动作的三维棍图。经过数据处理后,根据研究分析的需要可计算得到跳高试跳全程技术动作的任何三维运动学数据(如步长、重心的高度与速度、各身体环节的角度等)。
本文将使用三维跟踪扫描录像分析的方法,对在以往的研究报告中很少涉及的跳高技术的运动学参数进行初步分析,以期对今后跳高技术动作全过程的研究有所借鉴。
3.1 助跑阶段单步落地点的位置
背跃式跳高由助跑、起跳和过杆等技术环节所组成,其中助跑是跳高完整技术动作中的首要环节,目的是通过助跑获得最佳的起跳速度和准确的起跳点,以及对身体姿态合理控制。

图4 助跑阶段单步的位置(单位:m)
图4给出了郑幸娟试跳185 cm成功倒8步和失败倒5步2次试跳助跑每一单步落地点位置的俯视图,由于经过了坐标参考系的平移,横纵坐标轴的交点就是横杆的右端点,纵轴的方向就是横杆的方向,所以也能得到每一助跑单步落地点相对于横杆的位置。
由图4可知:郑幸娟在倒5步之前助跑基本上是直线助跑,在倒5步后就进入了弧线助跑阶段,并可清楚地看到运动员2次试跳助跑每一单步落地点的具体位置以及之间的差别。
3.2 助跑单步的步长与步频
助跑步长与步频通常可以表示运动员的助跑节奏,而运动员的技术特点也可从助跑的节奏反映出来。图5和图6分别给出了郑幸娟助跑阶段步长和步频的数据。从步长数据看,直线助跑阶段的步长较长,进入弧线助跑阶段(倒5步开始)步长呈缩短的趋势,在倒2步时步长有所增加,且2次试跳的增加量差别明显。
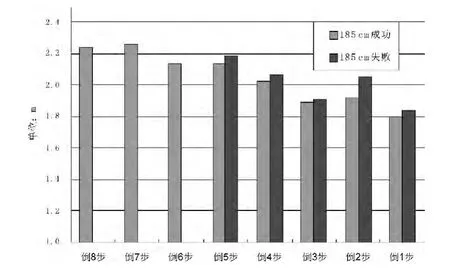
图5 助跑的步长

图6 助跑的步频
从步频的数据看,在倒2步前,助跑的步频是呈逐渐增加的趋势,且试跳185 cm成功的步频增加均匀;在倒2步时,两次试跳的步频迅速降低,通过录像观察发现郑幸娟助跑的倒2步是一小跳步,这就是倒2步步频突然减小的原因,也是郑幸娟助跑的技术特点之一。
3.3 助跑的弧线半径
背跃式跳高助跑弧线的设计对于运动员在弧线助跑阶段发挥助跑的速度和控制身体的姿态有重要作用。查阅以往有关跳高技术分析的报告,还没有发现有关助跑的弧线半径的数据报告。
基于三维跟踪扫描影像分析方法所得到的运动学数据,助跑的弧线半径可以依据弧线助跑步的着地点或者身体重心在水平面上投影的轨迹数据计算得到,在本文中称为助跑步着地点方法和身体重心方法。

表2 助跑的弧线半径 m
助跑步着地点方法是将倒1步至倒5步的步长相加作为弧长,倒5步脚的落点到起跳点的距离作为弦长来计算助跑弧线的半径;而身体重心方法是通过助跑倒5步落脚时刻到起跳步落脚时刻身体重心在水平面上的轨迹计算得到弧长和弦长,并进一步计算得到助跑弧线的半径。用这两种不同的计算方法得到的助跑的弧线半径数据结果如表2所示。数据表明:由身体重心方法计算得到的助跑的弧线半径比助跑步着地点方法所得到的半径要大,这是因为进入弧线助跑阶段后,身体为了克服弧线运动而产生的离心力必然内倾,造成身体重心在水平面上投影的轨迹落在脚着地点的内侧而产生的。
这2种助跑的弧线半径的计算方法用途不同。助跑步着地点方法的计算简便、直观、可操作性强,教练员可结合运动员技术和能力的特点,应用此方法对运动员的助跑弧线进行设计和调整,找到适合运动员当前技能状态的弧线助跑路线,并在训练中应用。使用身体重心方法计算得到的助跑的弧线半径,结合运动员的重心的速度参数就可估算出运动员所受的离心力,而且离心力的大小与助跑的弧线半径呈反比关系。需要注意的是:在弧线助跑时,运动员每一助跑步的支撑阶段,其支撑脚着地的地面反作用力的方向与其重心的运动方向并不一致,而且助跑弧线的半径越小,地面反作用力在径方向上的分量就越大,这就有可能导致运动员脚踝的运动损伤。
3.4 助跑的速度
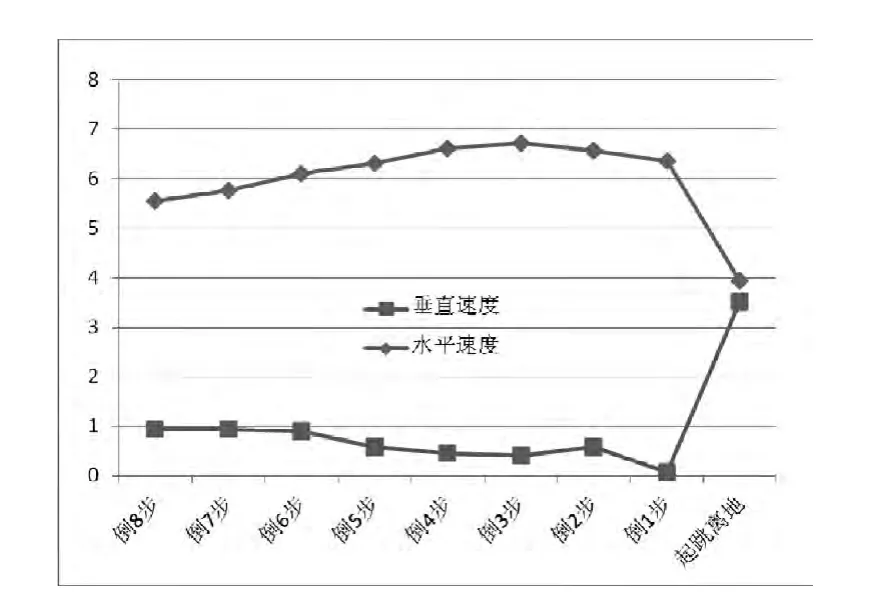
图7 助跑重心的速度
助跑的速度是指每一助跑步脚离地时刻身体重心的速度。图7是郑幸娟试跳185 cm成功身体重心水平和垂直的速度变化图。速度曲线显示:郑幸娟在助跑的倒3步之前身体重心的水平速度是逐渐增加的,在进入弧线助跑后,身体重心的垂直速度降低并保持基本稳定;在倒2步时出现了一跳步,重心垂直速度提高,这时的水平速度有所降低;在倒1步支撑脚离地时重心的垂直速度基本为零。运动员助跑每一步速度的变化反映了运动员的动作特点,这些特点要符合在起跳阶段获得尽可能大的起跳速度和最佳腾起角度的要求。
3.5 身体姿态控制
背跃式跳高的技术要求是在过杆时以背对横杆的姿势越过横杆,即在助跑、起跳和过杆的过程中身体躯干要绕垂直轴旋转180°左右,所以在助跑阶段,除了获得身体的速度之外,身体姿态的控制也是决定是否能越过横杆的重要因素之一。

图8 助跑重心水平速度方向变化
如图8所示,在直线助跑段,运动方向基本与横杆呈90°;进入弧线助跑段后,运动方向与横杆的夹角逐渐减小。需要注意的是,运动员在倒1步和起跳离地时刻身体运动方向与横杆间的角度变化不大,也就是说在倒1步时基本上就确定了起跳时身体重心运动方向与横杆间的关系;如果运动员在起跳阶段还要对身体重心运动方向进行调整,就可能会对起跳的效果产生不利影响。
此外,弧线助跑阶段还要对身体姿态进行调整,为以背对横杆的方式起跳越过横杆做准备。这里以双肩及双髋连线与YZ平面的角度来描述身体绕垂直轴旋转的情况,并分别以Ang-S和Ang-H来表示。

图9 弧线助跑及起跳身体姿态示意图
如图9所示,在进入弧线助跑时,身体基本上是面向横杆,然后躯干绕身体纵轴逆时针转动,其中躯干的转动主要是在内侧腿支撑阶段完成(图9 b,d,f)。如表3所示,在进入起跳步时,身体躯干已与杆架平面有一定的角度;在起跳脚离地时刻,Ang-S减小,而Ang-H增大;当肩和髋在横杆上方的时刻,Ang-S和Ang-H接近于180°,也就是说,在肩和髋依次越过横杆时,当肩肩连线和髋髋连线与横杆基本平行时是最佳的身体姿态。

表3 起跳和腾空阶段Ang-S和Ang-H数据
在国外已有学者使用三维跟踪扫描录像分析方法获得了水上运动项目赛艇和障碍滑雪运动员的三维运动学数据[10-11];而在国内,目前还没有应用此研究手段的相关研究报告。本文探讨使用三维跟踪扫描录像分析方法,为其他运动项目的三维运动学数据的采集和研究提供参考。
4 结语
1)作为研究方法,三维跟踪扫描影像分析解决了以往的研究手段所不能解决的由于运动范围大,运动目标成像小的问题,从而可对运动的全过程进行完整全面的分析。2)坐标参考系的置平步骤是三维跟踪扫描影像分析方法的重要环节,这样可以保证所获得的三维运动学数据客观地描述运动过程。3)通过对运动员训练时的实测数据处理分析,获得了跳高全程助跑的步长、步频、助跑弧线的半径等在以往研究很少涉及的运动学指标,为深入研究提供了可借鉴的应用实例。
[1]陈洁敏,章莺.对我国部分优秀男子跳高运动员起跳技术的运动学分析[J].中国体育科技,2001,37(4):37-40.
[2]李东国,赵连甲.现阶段中国男子背越式跳高运动员助跑最后一步至起跳的技术分析[J].北京体育大学学报,2004,27(7):975-977.
[3]李建英,王黎明,许家巧.我国优秀男子跳高运动员助跑最后一步与起跳技术的运动学分析[J].体育科学,2002,22(1):63-66.
[4]石晓峰,刘生杰,李建英.第11届世界青年田径锦标赛男子跳高运动员起跳技术的运动学分析[J].中国体育科技,2009,45(4):32-36.
[5]宋广林,闫之朴.对我国男子优秀跳高运动员起跳技术的三维运动学分析[J].体育学刊,2005,12(6):115-118.
[6]雍明,邹玉玲,陆阿明.跳高运动员郑幸娟倒3步助跑技术分析[J]体育学刊,2011,18(6):119-123.
[7]艾康伟,王博伟,彭磊华.三维跟踪扫描影像分析方法的实现与精度分析[J].中国体育科技,2011,49(3):19-24.
[8]DRENK V.Bildme Bverfahren für schwenk-und neigbare sowie in der rennweite variierbare Kameras[J].Schriftenreihe zur Angewandten Training swissenschaft,1994(1):130-142.
[9]艾康伟,贵慧宏,王博伟,等.三维影像分析控制点测量与坐标转换软件系统的设计与实现[J].体育科学,2011,31(1):39-41.
[10]RASCHNER C.Dynamic And Kinematic Analysis Of The Giant-Slalom Technique Of Top Ski Racers[J],SPECTRUM Suppl.1999.
[11]REYHER D.3D kinemetrische Bewegungsanalyse im Kanurennsport für die Bootsgattung Einercanadier[D].Diplomarbeit,Leipzig 2007.
猜你喜欢
疯狂英语·新读写(2022年1期)2022-11-23
辽宁丝绸(2021年3期)2021-09-11
作文周刊·小学五年级版(2021年28期)2021-03-16
电子制作(2018年12期)2018-08-01
新课程·下旬(2018年7期)2018-01-19
小猕猴智力画刊(2016年12期)2017-01-05
阅读与作文(小学高年级版)(2016年10期)2016-10-12
中学物理·高中(2016年1期)2016-05-26
肇庆学院学报(2016年5期)2016-03-11
新高考·高一物理(2015年5期)2015-08-18