基于单神经元PID的开关电源控制研究
2014-01-15 10:00赵鑫,郭鹏,徐周
电子设计工程 2014年16期
赵 鑫, 郭 鹏, 徐 周
(河海大学 江苏 南京 211100)
开关电源是一种采用开关方式控制的直流稳压电源。它以小型、高效、轻量的特点广泛应用于各种电子设备中[1-2]。开关电源的控制部分目前大多是按模拟信号来设计和工作的,其抗干扰能力差,信号有畸变。由于开关电源是一个非线性的对象,其精确模型的建立是相当困难的,常采用近似处理,并且其供电系统和负载变化具有不确定性,故采用上述模拟或数字PID控制方法,常难以使PID调节器的参数随之变化。
近来发展起来的单神经元PID控制是一种仿人工智能控制法,它不依赖被控对象的数学模型,便于利用人的经验知识实行控制,这对于一些复杂可变的或结构不确定难以用准确的数学模型描述的系统而言是非常适宜的。该控制器是通过对加权系数的调整来实现自适应、学习功能,权系数的调整是很据有监督的Hebb学习规则实现的。由于构成的控制系统算法简单,易于实现,能够适应环境的变化,可实时控制,有较强的鲁棒性。
1 电路拓扑结构及数学模型建立
1.1 主电路结构
系统采用全桥DC/DC变换器的结构框图如图1所示,由三相不控制整流桥、输入滤波电感L1、输入滤波电容C1、4只功率管 S1~S4、隔直电容 Cb、变压器 T、全波整流二极管 VD1、VD2以及输出滤波电感L2和输出滤波电容C2组成,Rc为输出滤波电容的等效串联电阻。

移相全桥DC/DC变换器的工作原理:每个桥臂的两个功率管成180度互补导通,为避免出现共态导通现象,电路中会增加适当的死区时间。每个功率管的导通时间固定,而两个桥臂的导通角相差一个相位,即移相角,通过调节移相角的大小来控制占空比,从而调节输出电压。
1.2 数学模型的建立
为了便于对被控对象进行数学分析,假设所有的功率器件都工作在理想状态,在忽略二极管压降的情况下。移相全桥DC/DC变换器的工作过程的结果与Buck变换器相近,通常将全桥DC/DC变换器近似为Buck电路进行建模分析。Buck变换器的等效框图如图2所示。

图2 Buck系统等效框图Fig.2 The equivalent diagram of BUCK system
其中,L、C、RC、R分别表示输出滤波电感、输出滤波电容、输出滤波电容等效串联电阻和负载。Vin为全桥DC/DC变换器中变压器T原边的输入电压值、K为变压器原副边匝比,输出滤波环节的传递函数Ho(s)可表示为:

系统采用电压闭环控制模式,基于输出电压设计一个单环的闭环校正系统。电压闭环模式下,控制对象为负载上的输出电压,如图3所示的框图即为电压闭环模式的原理图,其基本的控制过程如下:将给定的参考电压与采样得到的输出电压进行比较得到电压误差值(s),误差s)经过电压闭环控制器处理就得到占空比控制信号。

图3 电压闭环模式框图Fig.3 Closed-loop mode voltage diagram
根据电压闭环模式原理图,可以推导得到基于电压闭环的Buck变换器的系统框图,如图4所示。
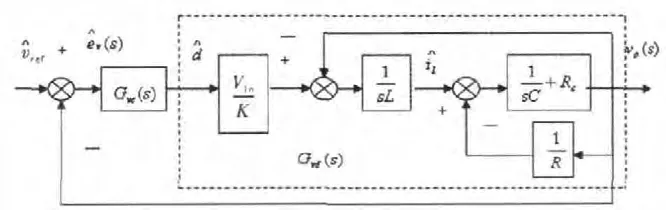
图4 系统框图Fig.4 System diagram
假设Vin的小信号扰动=0可以得到以下电路方程:

综合式(1)和式(2)即可得到:


其中Vg=。
数学模型涉及到的相关参数如下:L2=0.5 μH、C2=220 μF、Rc=50 mΩ、Vg=80 V、R=2 Ω。基于前面得到的变换器传递函数,建立系统的数学模型,将相关参数代入上面分析得到的变换器输出(s)对控制变量(s)的传递函数 Gvd(s)则有:

则占空比—输出的开环传递函数:

2 单神经元PID控制
2.1 控制算法
神经元是神经网络的基本单位,具有自学习和自适应能力,而且结构简单易于计算。常规PID控制器的参数与被控对象联系密切,将二者结合组成具有自适应能力的神经元PID控制器,可以实现占空比的自动调节来达到输出电压稳定。单神经元自适应PID结构如图5所示[3-6]。
控制算法及学习算法为

式中,x1(k)=e(k),x2(k)=e(k)-e(k-1),x3(k)=e(k)-2e(k-1)+e(k-2),z(k)=e(k),ηI,ηp,ηD分别为积分、比例、微分的学习速率,K为神经元的比例系数,K>0。
对积分I、比例P和微分D分别采用了不同的学习率ηI,ηp,ηD以便对不同的权系数分别进行调整。K值的选取非常重要。K越大,则快速性越好,但超调量大,甚至可能使系统不稳定。当被控对象时延增大时,K值必须减小,以保证系统稳定。
K值选择过小,会使系统的快速性变差。
2.2 算法模型及S函数
根据单神经元算法,利用simulink模块建立基于单神经算法的PID模型,如图6所示。
其中S函数程序如下:
function[sys,x0,str,ts]=single_neuron(t,x,u,flag,yita,K)
switch flag,
case 0,
[sys,x0,str,ts]=mdlInitializeSizes;

图6 单神经元PID控制器内部结构Fig.6 Single neuron PID controller’s internal structure
case{1,4,9},
sys=[];
case 2,
sys=mdlUpdate(t,x,u,yita);
case 3,
sys=mdlOutputs(t,x,u,K);
otherwise
error(['Unhandled flag=',num2str(flag)]);
end
function[sys,x0,str,ts]=mdlInitializeSizes()
sizes=simsizes; %产生size数据结构
sizes.NumContStates=0; %连续状态数
sizes.NumDiscStates=3; %离散状态数
sizes.NumOutputs =1; %输出量个数
sizes.NumInputs =4; % 输入量个数
sizes.DirFeedthrough=1; %是否存在代数循环
sizes.NumSampleTimes=1; %采样时间个数
sys=simsizes(sizes); %返回 size数据
结构所包含的信息
x0=[0.3;0.3;0.3]; %设置初始状态
str=[]; %保留变量并置空
ts=[-1 0]; %采样时间
function sys=mdlUpdate(t,x,u,yita) %更新离散状态
sys=x+yita*u(1)*u(4)*(2*u(1)-u(2));
function sys=mdlOutputs(t,x,u,K) %计算输出量
xx=[u(1)-u(2) u(1) u(1)+u(3)-2*u(2)];
sys=u(4)+K*xx*x/sum(abs(x));
3 实验仿真及分析
3.1 常规PID控制
根据Ziegler-Nichols法整定 PID参数得到Kp=0.08、KI=0.45、KD=0.5,如图7为其仿真结果:

图7 常规PID仿真结果Fig.7 Conventional PID simulation result
由图7分析可知:常规PID的响应比较慢,大概需要15 s左右才能达到稳态,且中间有超调振荡。
3.2 单神经元PID控制
设定单神经元自适应PID控制器中的学习效率:ηP=600、ηI=10、ηD=50、K=0.6,初始权值为 w1=0.3、w2=0.3、w3=0.3。如图8为单神经元PID控制所搭建的simulink仿真模型:

图8 单神经元PID仿真模型Fig.8 Single neuron PID simulation model
如图9为其仿真结果:

图9 单神经元PID仿真结果Fig.9 Single neuron PID simulation result
由上图分析可知:单神经元PID控制的响应速度很快,能够在0.05 s内达到稳定状态,且中间没有超调,能够更好的满足实际工程需要。
同时,为了验证单神经元PID控制在干扰情况下的效果,在0.25 s稳定状态的时刻施加一个幅值为5 V的阶跃信号,如图10为阶跃情况下的仿真效果:

图10 阶跃干扰下的仿真效果Fig.10 The simulation result under step disturbance
由图10分析可知:在阶跃干扰信号的作用下,电压波动很小。说明单神经元PID控制下的抗干扰能力强,自适应能力强,鲁棒性好,能够更好的满足工程需求。
4 结 论
结果表明:由于单神经元控制器的连接权值可调,使得基于单神经元PID控制器具有在线调整参数,自我学习以及自适应能力。在开关电源的稳压控制上,优于常规PID,能快速提高反应性能,鲁棒性好。此外,单神经元控制器的控制方法简单,动态参数较少,性能出色,依靠软件实现,能够适应控制对象的时变性,在工业控制过程中的应用前景良好。
[1]张占松,蔡宣三.开关电源的原理与设计[M].北京:电子工业出版社.
[2]刘文军,罗玉锋.开关电源模糊控制PID的设计和MATLAB仿真研究[J].控制系统,2006(28):57-59.LIU Wen-jun,LUO Yu-feng.The design of PID fuzzy control of switching power supply and MATLAB simulation[J].Control System,2006(28):57-59.
[3]汪临伟,彭雪峰.单神经元PID的三轴转台控制系统设计[J].液压与气动,2011(5):13-15.WANG Lin-wei,PENG Xue-feng.Single Neuron PID control system design of three-axis turntable[J].Hydraulic and Pneumatic,2011(5):13-15.
[4]范玉涛,张静.基于PID神经网络的液压AGC辊锋控制系统[D].哈尔滨:哈尔滨理工大学,2010.
[5]曹敏,徐凌桦.神经元PID算法在倒立摆控制系统中的应用[J].微计算机信息,2009,25(1):70-71.CAO Min,XU Ling-hua.Neuron PID algorithm in inverted pendulun control system application[J]. Microcomputer Information,2009,25(1):70-71.
[6]张世韬,杨风,郝赛.单神经元PID控制器研究及仿真[J].机械工程与自动化,2009,6:69-70.ZHANG Shi-tao,YANG Feng,HAO Sai.Single neuron PID controller and simulation[J].Mechanical Engineering and Automation,2009,6:69-70.
猜你喜欢
体育科技文献通报(2022年3期)2022-05-23
新高考·高二数学(2022年3期)2022-04-29
汽车维修技师(2019年7期)2020-01-16
电子制作(2019年23期)2019-02-23
汽车维修技师(2018年11期)2018-05-11
黑龙江电力(2017年1期)2017-05-17
中学生数理化·高一版(2017年1期)2017-04-25
环境科技(2016年5期)2016-11-10
中学数学杂志(初中版)(2016年5期)2016-11-01
浙江理工大学学报(自然科学版)(2015年4期)2015-03-01