
基于CCP协议的发动机电控单元匹配标定
2014-01-16 05:57张成伟龚元明
电子设计工程 2014年6期
张成伟,龚元明
(上海工程技术大学 汽车工程学院,上海 201620)
随着发动机电控技术的发展,发动机匹配标定已成为发动机管理系统开发不可缺少的重要环节,发动机电子控制单元是发动机管理系统的核心,在发动机管理系统的开发中,有一系列MAP图参数,需要在匹配标定过程中确定,有了这些MAP图参数,发动机才能满足动力性、经济性和排放性的综合要求。基于CCP协议的标定系统开发已成为研究的重点。CCP协议(CANCalibration Protocol)是欧洲ASAP项目组[1]基于CAN协议制定的一套对控制系统参数标定的系统。目前基于CAN总线的分布式系统在汽车电子领域得到广泛应用,发动机电子控制单元的标定已成为发动机电子控制装置开发的一个重要环节。CCP标定协议是ASAP标准的一部分,它首先是由标定系统制造商提出并开发的,该协议为标定系统开发提供了标准平台,在电控系统开发方面具有强大的优势,已逐渐为世界各大汽车公司所采用,如BOSCH公司和DELPHI公司的标定系统。因此基于CAN的CCP协议是匹配标定平台技术的首选。采用CCP协议可以快速高效地实现对发动机电控单元的标定。
然而基于CCP协议的标定,只有ECU控制器与标定工具底层内部均具有支持CCP协议的驱动程序 (CCPdriver),才能够实现二者之间数据的传输。目前大多数应用都采用Vector公司提供的free CCPdriver。但是其中难免有许多复杂而且不适用的函数,对于代码的运行效率以及空间占有率都非常不利。基于此,文中设计了一个通用的ECU与CCP驱动接口程序,以帮助缩短整个标定开发周期。
CANape是一款ECU开发、标定、诊断和测量数据采集的综合性工具。通过CCP标定协议,不仅能完成对ECU的标定,同时还能同步地获取ECU内部的测量参数,实时采集和显示ECU内部信号。基于此,本文将阐述如何基于CCP协议使用CANape完成ECU的标定。
1 CCP协议及工作原理
CCP 协议[2]是 ASAP(Arbeitskreis zur Standardisierung von Applikationssystemen)标准的有机组成部分。该协议是符合ASAP中ASAP1 a标准的协议,它基于CAN2.0B通讯协议。
1.1 CCP通信方式
该通信协议采用主-从式通信方式如图1,主设备通过CAN总线与多台从设备相连接,主设备是测量标定系统,从设备是需要标定的ECU,主设备首先与其中一个从设备建立逻辑链接,建立逻辑连接后,主、从设备之间所有的数据传递均由主机控制[3]。
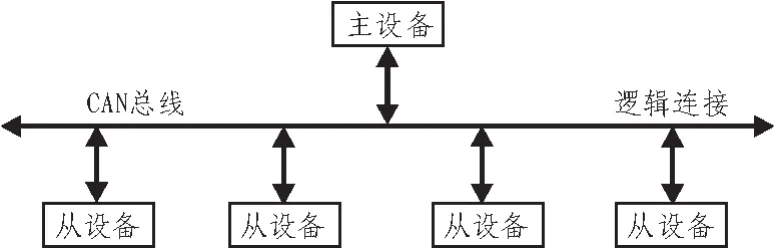
图1 CCP通信方式Fig.1 CCPcommunication mode
1.2 CCP协议的工作模式
CCP定义了两种工作模式:Polling(查询)模式及DAQ(Data Acquisition Command)模式。查询模式下,主设备与从设备间的每一次通信都由主设备发送命令来起始,从设备收到主设备的命令后,执行相应的操作并反馈一帧报文。这种工作模式由于需要主机与从机之间进行“一问一答”的信息交互,工作效率不高,但实现简单,且占用ECU内存资源较小。
DAQ模式使从设备可以脱离主设备命令控制按一定周期自动向主设备上传数据。DAQ模式下,主设备首先发送一条请求DAQ命令,从设备收到后,按命令中参数自行配置并组织需要上传数据,然后按一定周期自主向主设备上传数据。这种模式不需要主机命令逐步控制,工作效率高,但实现较复杂,需要上传数据量很大,会占用大量ECU内存空间。
1.3 CCP报文帧结构
CCP协议中有两种CAN报文对象如图2,根据其数据流向,都有一个唯一的ID标识符进行标识,ID在控制器的描述文件(如A2L)中定义,CRO用于主设备向从设备发送数据命令,DTO则用于从设备发送数据至主设备,CRO高于DTO。
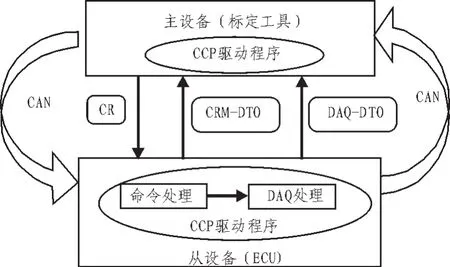
图2 CCP协议主、从设备CAN报文通信Fig.2 CCPprotocol master and slavedevice CANmessagecommunication
Polling模式下 CRM-DTO (Command Receive Message—Data Transmission Object),为ECU发送给匹配标定工具的命令响应,即对CRO的响应;DAQ模式下 DAQ—DTO(Data Acquisition—Data Transmission Object), 即 ECU发送给匹配标定工具的实时测量数据,用于监控的目的。
2 CCP驱动与CAN驱动接口程序的实现
在使用标定系统对控制器实施基于CCP协议的标定工作前,必须在控制器端程序上进行相应的开发工作。需要上位机 MCS(Measurement Calibration System)与下位机ECU的应用程序都能够支持CCP协议,这部分应用程序称为CCPdriver。本文采用Vector公司提供的free CCPdriver[4]。
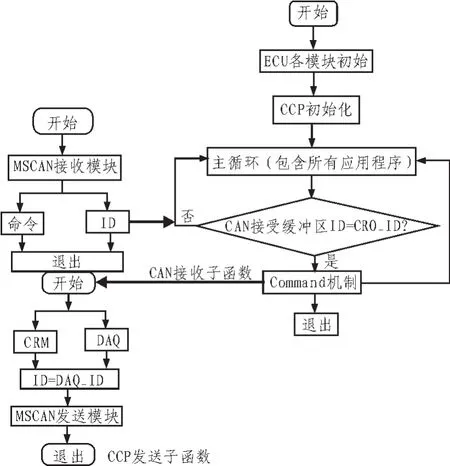
图3 接口程序基本流程图Fig.3 Basic flow chart of interface program
主设备发送的命令使用CAN数据帧进入CAN驱动程序的接收模块,判断为CRO后,交由CCP驱动程序的命令处理模块处理。命令处理模块根据接收到的CRO的CMD代码进行命令解释并执行,生成应答数据,包括从应用程序中获取数据。
基于CCP协议的基本CAN通信流程如图3所示。ECU接收到报文后,转入CAN接收子函数,在常规接收流程后,对报文的ID标识符进行判断,如为CRO-ID,则调用CCP driver的命令处理器。命令处理器的调用会在主函数中进行。
Command处理机制由一个ccp Command()命令处理函数完成,ccp Command()通过调用CAN driver中的CCP发送子函数ccp Send()发送一帧 DTO。ccpSend()须在CAN中实现,由CCPdriver调用。当命令处理模块判断收到CRO为DAQ请求后,启用CCP驱动程序的DAQ处理模块。DAQ处理模块从应用程序待监测的变量中组织应答数据,然后调用CAN driver程序的发送模块,将数据以DAQ-DTO的形式自行周期发送至主设备。
3 CANape进行基于CCP协议的标定
CANape标定系统的结构如图 4,CANape是德国Vector公司出品的一款基于ASAP标准[5]的车载控制器测试、诊断和标定工具。它通过基于CCP协议的CAN总线物理连接,实现硬件接口与ECU相连。ASAPl作为应用层同控制设备之间接口的标准,定义了应用系统和ECU之间的物理和逻辑连接。其中,ASAPla定义了控制器(ECU)和MCD(Measurement calibration and Diagnostics)系统之间的物理层和协议层。ASAP2标准对ECU功能和接口及标定信息进行了标准和规范化的描述,按此标准生成的ASAP2描述文件作为标定系统的数据库而保存。ASAP3定义了MCD系统同用户之间的接口,此标准的目的是使用户可以通过调用标准化的函数,MCD系统进行数据和命令的交互来实现测量、标定和诊断的功能[6]。

图4 CANape标定系统的结构Fig.4 Structure of CANape calibration system
CANape对控制器的参数标定和数据测量都是基于ASAP2控制器描述文件,该文件记录了ECU控制器中各标定参数和测量变量在控制器中的存储地址、存储结构、数据类型和转换公式等。这些标定参数和测量数据都会有一个变量名,如发动机转速、冷却水温度等。当使用CANape进行参数标定时,只需要访问该变量在ASAP2描述文件的变量名即可,通过变量名找到该变量在控制器中的存储地址、数据长度等信息,然后进行参数标定与优化并生成MAP图。
在电控单元标定的过程中,需要标定的参数主要被保存在FLASH或ROM中时,当ECU重新上电初始化后,程序自动将需要标定的参数初始值复制到RAM中。标定过程中,标定工程师通过CANape标定软件不断修改和优化Calibration RAM中的参数值。标定全部结束后,再将该段RAM中标定优化后的参数值复制回FLASH或ROM中,并同时通过标定显示界面可以看到生成的相应MAP图。
在CANape中标定方法有两种,分别是在线标定和离线标定。在线标定(有没有镜像内存都是可以的),标定对象的值改变时,新的值会立刻下载到镜像内存和ECU的RAM中,或改变标定对象值,新的值首先存储在Buffer,不会立刻传给ECU,直到选择“更新参数”时,该值才会被下到ECU或保存到镜像内存。离线标定时(必须激活镜像内存),标定对象的改变值被保存到镜像内存中,当变为在线,这些值会下载到ECU中。
4 结 论
在基于现场总线的分布式控制中,汽车网络技术进一步优化了汽车的电子控制系统,传统意义的发动机匹配标定方法已无法满足。基于CAN总线网络连接的发动机电子控制单元,目前已成为研究和应用的重点。CANape是基于CCP协议的通用型发动机电子控制单元匹配标定工具,在国内新型电控发动机开发过程中得到了广泛的应用。使用CANape能够缩短开发周期,快速准确地进行汽车发动机电子控制单元的匹配标定,并在实际开发应用的过程中达到了预期效果,使发动机综合性能得到提高。
[1]胡嘉,杨正林,张彤,等.基于CCP协议的混合动力整车控制器标定系统及其底层驱动的开发[J].汽车科技,2010,5(4):2-4.HUJia,YANGZheng-lin,ZHANGTong,et al.Hybrid electric vehicle controller based on CCP protocol calibration system and itsunderlyingdriven development[J].Journal of Automotive Technology,2010,5(4):2-4.
[2]李先成.电控喷油系统喷油特性测试和油量线性化自动标定系统开发[D].上海:上海交通大学,2008.
[3]罗峰,孙泽昌.汽车CAN总线系统原理、设计与应用[M].北京:电子工业出版,2010.
[4]陈振辉.基于CCP协议标定混合动力车整车控制器[D].上海:上海交通大学,2007.
[5]李计融,钟再敏.车载控制器匹配标定ASAP标准综述[J].汽车科技,2004,10(6):54-58.LI Ji-rong,ZHONG Zai-min.Vehicle matching controller calibration ASAP standard review[J].Journal of Automotive Technology,2004,10(6):54-58.
[6]韦文波.基于CCP协议的电控发动机标定系统开发[D].湖南:湖南大学,2011.
猜你喜欢
娃娃乐园·综合智能(2022年3期)2022-04-19
汽车维修与保养(2020年11期)2020-06-09
军营文化天地(2018年2期)2018-04-20
中国惯性技术学报(2017年1期)2017-06-09
光学精密工程(2016年3期)2016-11-07
中国老区建设(2016年9期)2016-02-28
汽车实用技术(2015年8期)2015-12-26
汽车维修与保养(2015年12期)2015-04-18
汽车维修与保养(2015年2期)2015-04-17
西安建筑科技大学学报(自然科学版)(2014年6期)2014-11-10
