
基于模糊控制的气动造浪机节能技术研究*
2014-02-07 01:22黄学飞
机电工程技术 2014年6期
黄学飞,庞 茂
(1.广州铁路职业技术学院机械与电子学院,广东广州 510430;2.浙江科技学院机械与汽车工程学院,浙江杭州 310023)
人工造浪是一种新颖的水上娱乐项目,其通过造浪机在室内水池中模拟海上波浪,使游客在室内感受大海里波浪的汹涌澎湃。随着国内越来越多游客对人工造浪娱乐项目的青睐,人工造浪设备也得到水上乐园经营者的关注。目前应用在国内水上乐园的人工造浪设备大致分为三种:摇(推)板式造浪机、冲箱式造浪机和气动造浪机。其中气动造浪机以其结构简单,便于维护,波形多样等特点在水上乐园得到广泛应用。但气动造浪机采用电机驱动鼓风机实现造浪,其连续运行能耗很大,为此本文将模糊控制技术引入气动造浪机的控制系统中,探讨减小人工造浪机运行能耗的方法。
1 气动造浪机结构优化
1.1 气动造浪机结构原理
气动造浪机主要包括由电机和鼓风机组成的空气供给系统、气体输送管路、造波风罩,及布置在管路上配气阀和对应的控制系统等,其通过配气阀控制鼓风机输出气流的周期性变化实现造浪。其中配气阀在一个工作周期内分为两步,第一步由鼓风机将空气压入造波风罩,使风罩内的水排出罩外,从而在风罩前形成波峰;第二步控制配气阀将风罩内的空气释放,水被反吸入风罩,在风罩前形成波谷。在配气阀的周期控制下,即可在水池内形成一定波长的人造波浪。
1.2 气动造浪机改进设计
传统气动造浪机每个周期内空气都会被压入风罩和完全释放一次,每个工作循环中负载变化幅度大,容易导致电机瞬态过载,工作温度过高。为此本文针对原有气动造浪机结构进行了优化和改进,在鼓风机出口增设了一套储气装置。如图1所示。造波过程仍分为两步,其中前半周期配气阀2打开,排气阀4关闭,空气经储气筒被压入造波风罩,在造风罩前形成波峰。后半周期时,配气阀2关闭,排气阀4打开,水被吸入风罩,在造风罩前形成波谷,同时鼓风机向储气筒3输送空气,为下一周期的造波做准备。采用该种结构后,鼓风机在整个造波周期内都处于工作状态,减小了负载变化率,同时大大提高了驱动电机的工作效率。改进后的造浪机与传统气动造浪机相比,产生同样波高和波长的波浪需要的电机稳定工作转速明显下降,节能效果显著。下面将采用模糊技术控制电机,进一步优化鼓风机的工况和节能效果。
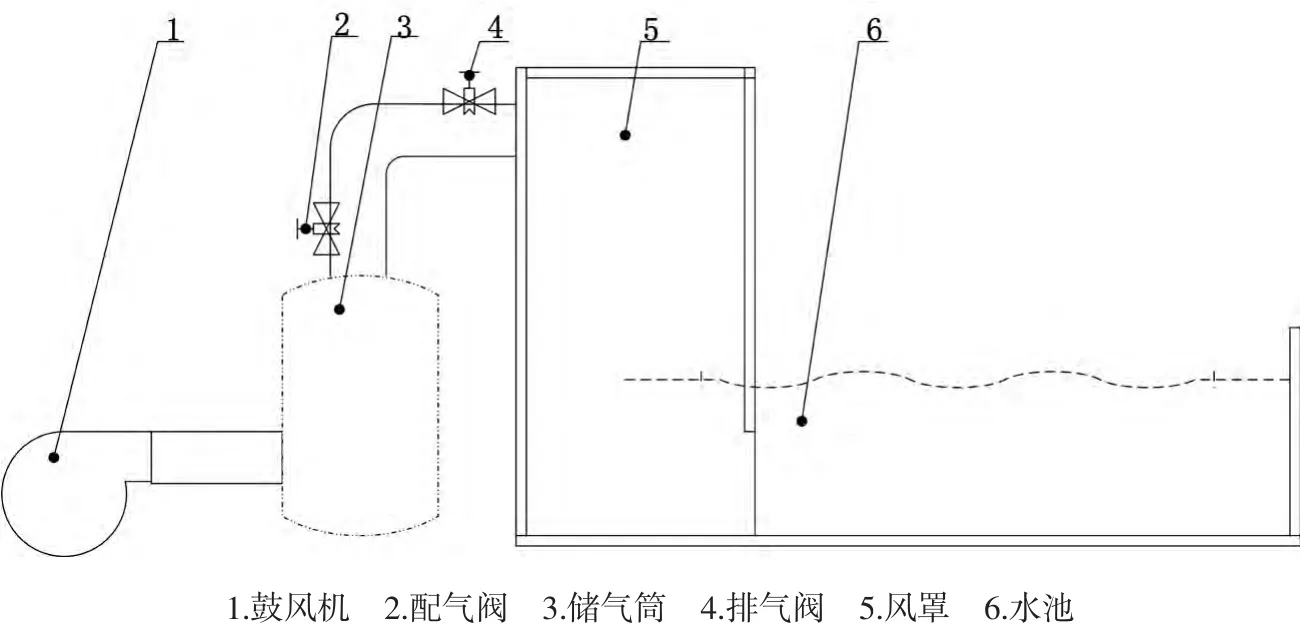
图1 改进的气动造浪机结构示意图
2 气动造浪机模糊控制
2.1 气动造浪机能耗分析
气动造浪机的能耗主要是鼓风机的驱动电机消耗的能量,鼓风机的功率取决于造浪的水域面积和浪的高度及波长等参数,鼓风机设计时应按其最大功率要求设计:

其中:Wmax为鼓风机需要的最大功率;Pmax为鼓风机出口气压,Qmax为鼓风机出口流量,其中:

式(2)中:Pout为造浪风罩下最大气压;Δp为气体输送管路中的压力降。

式(3)中:L为风罩长度;A为风罩截面积;λmax为造浪的波长最大值。
传统的气动造浪机,鼓风机驱动电机按满足功能参数对应的最大功率要求选型,而实际运行中,风机不需一直运行在最大功率状态下,从而造成气动式造浪机运行中能耗的浪费[1]。为此本文对传统气动造浪机结构进行优化的基础上,将模糊控制技术引入气动造浪机控制过程,以降低该类造浪设备运行的能耗。
2.2 模糊控制器设计
模糊控制是以模糊数学知识为理论基础,基于常识推理、实际操作经验和实验结果建立推理规则,不需建立被控对象的精确数学模型,控制机理和策略易于接受和理解,设计简单,应用方便[2]。气动造浪机是一个强耦合的非线性系统,其运行中受到外界多种因素影响,状态复杂多变,难以得到精确的数学模型,采用模糊算法对其进行控制是一种简单有效的方式。
2.2.1 输入输出变量模糊化
系统直接控制的目标是人造波浪的波高,但其与鼓风机风量、风管风罩结构布置等均有关,传递模型复杂,仅以此作为模糊控制器的输入变量较难控制,因此本文同时选择人造波浪的波高和造浪机的储气筒压力波动值作为控制器输入变量,将鼓风机驱动电机的转速作为模糊控制器输出变量。将输入论域量化为7档,NL、NM、NS、ZE、PS、PM、PL[3],按照模糊推理的一般规则,输入变量人造波浪的波高Hw论域取值为:{1,2,3,4,5,6,7},储气筒压力波动值ΔP论域取值为:{0,1,2,3,4,5,6},为达到更好的节能效果,将输出变量论域鼓风机转速n取值细分为 10 档:{1,2,3,4,5,6,7,8,9,10}。取各模糊子集的隶属函数均为等腰三角形[4],图2给出了储气筒压力波动值的隶属函数。此外,两个输入变量之间不同权重因子值,对应的偏差对控制输出量的加权程度也不同。本控制系统将两个输入变量的权重调整因子分别设为0.6和0.4。
2.2.2 模糊规则建立
控制规则选择为:
If(Hwis a)and(ΔPis b)then(n is c)
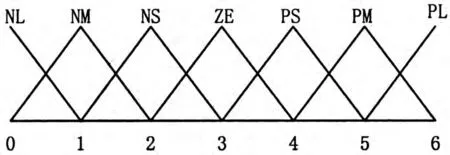
图2 储气筒压力波动值隶属函数图
其中a,b,c分别为Hw,ΔP和n论域中的元素。根据设计者自己的经验及前期实验数据,得到控制规则表如表1所示。
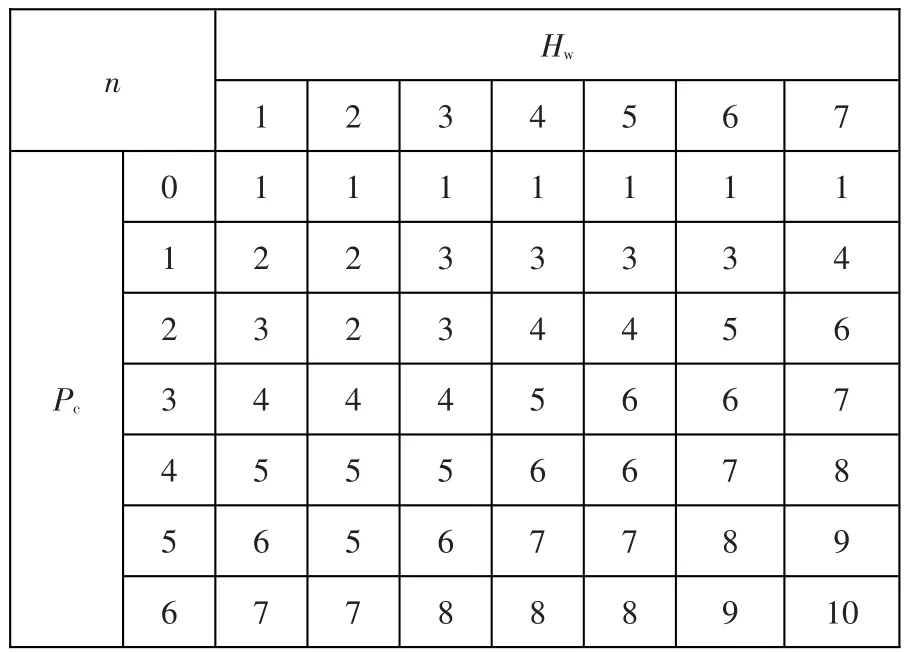
表1 模糊控制规则表
2.2.3 模糊推理选择
目前模糊推理常用的有Sugeno型和Mamdani型两个系统。Mamdani型模糊推理通过综合多个有经验的操作员的控制规则进行模糊推理,符合人们思维和语言表达的习惯,因而能够方便地表达人类的知识和经验。但其采用极小运算规则表达模糊关系,推理后的输出为变量的隶属度函数或离散的模糊集合,因此要控制实际对象还需进行去模糊化处理,不利于工程应用。Sugeno型模糊推理系统则要求运用推理规则后得到的输出变量隶属度函数必须是关于输入变量的线性函数或常值函数,因此其运算速度较Mamdani快,数据处理更简单直观,便于与PID控制以及优化、自适应等其他智能控制方法结合应用[2]。
鉴于Sugeno型推理规则的上述优点,同时考虑到人工造浪控制系统采用的是PLC,因此选用Sugeno型推理进行。
2.3 控制器输入输出仿真分析
根据上述确定的模糊控制器输入输出变量及推理规则,在Matlab/Simulink中进行了仿真[5],得到的输入输出关系图如图3所示。从图3可以看出,运用模拟控制后,不同浪高对应的风机转速连续稳定,负载特性明显改善。

图3 模糊控制器输入输出变量图
3 结论
在对传统人工造浪机的结构进行优化改进的基础上,将模糊控制技术引入人工造浪机的控制中,建立了基于浪高和鼓风机压力波动控制的模糊控制器,将模糊控制算法和对鼓风机现场控制经验相结合,得到模糊控制规则,并运用Matlab/Simulink模块对输入输出变量进行了仿真。从仿真结果可以看出,风机转速输出连续稳定,有效优化了风机运行中负载变化率,达到节能的目的。
[1]杨建军.室内小型多功能风浪水槽控制系统研究[D].青岛:青岛大学,2010.
[2]刘寅,张晓光,刘继高.自调整模糊控制在压风机集控系统中的应用[J].煤矿机械,2012,33(6):204-206.
[3]郑孝东,程根银,顾涛,等.基于模糊-神经网络的局部通风机变频调速系统设计[J].煤炭工程,2010(4):110-112.
[4]孙云辉,王钊,肖威,等.基于PLC的离心风机模糊控制系统设计与实现[J].制造业自动化,2011,33(5):123-125.
[5]马举,刘齐宏,冷静.基于MATLAB/SIMULINK交流变频调速系统的仿真研究[J].中国测试技术,2008,34(2):54-56.
猜你喜欢
机械制造(2021年12期)2022-01-06
防爆电机(2020年5期)2020-12-14
水电站设计(2020年3期)2020-09-23
山东化工(2020年9期)2020-06-01
煤(2020年3期)2020-03-23
汽车维护与修理(2016年10期)2016-07-10
设备管理与维修(2016年5期)2016-03-16
合成技术及应用(2015年3期)2015-12-11
压缩机技术(2015年5期)2015-10-27
汽车维护与修理(2015年7期)2015-02-28
