
4WIS-4WID车辆横摆稳定性AFS+ARS+DYC滑模控制
2014-02-27 04:55王振臣刘建旺
汽车工程 2014年3期
张 聪,王振臣,程 菊,刘建旺
(燕山大学,西校区电院工业计算机控制工程河北省重点实验室,秦皇岛 066004)
前言
横摆运动稳定性能对车辆的安全性能起着举足轻重的作用。直接横摆力矩控制(direct yaw-moment control, DYC)已成为当今研究的热点。DYC用车辆运行时实际状态变量值跟踪期望状态变量值,利用差压制动和/或改变驱动力矩的控制方法,产生维持车辆稳定性所需的附加横摆力矩,防止车辆在行驶过程中出现过多转向或不足转向等状况,保证行驶的安全性。文献[1]和文献[2]中运用模糊控制对后轮主动转向(active rear steering, ARS)和DYC进行了有机结合,但模糊关系的确定很大程度依赖于人工经验。文献[3]中基于广义预测理论对传统最优前轮主动转向(active front steering, AFS)/DYC进行了优化,但依赖于预测模型。文献[4]中将DYC和ABS分层协调控制,更有利于应对极限工况,但没有考虑四轮转向的作用。文献[5]中提出了车辆DYC的LQG/LTR鲁棒控制方法,增强了系统的鲁棒性,但其精准性较差。
文献[6]中针对四轮独立转向-独立驱动(4-wheel-independent-steering and drive, 4WIS-4WID)车辆,基于模糊控制技术提出了集成主动前、后轮转向和差压制动DYC的车辆横摆稳定性控制系统,充分利用了三者的优势,使低附着路面上高速运行的车辆在转向过程中有更大的侧向力裕量。
本文中针对4WIS-4WID车辆,通过对前、后轮主动转向控制器引入2自由度4WIS-4WID车辆参考模型状态反馈,完成AFS+ARS和DYC控制系统的集成。将AFS+ARS和直接横摆力矩控制有机结合,优势互补。应用滑模变结构控制(sliding model variablc structure control, SMVSC),分别设计横摆角速度控制律和质心侧偏角控制律。通过协调控制,兼顾横摆角速度和质心侧偏角对车辆侧向稳定性能的影响,解决二者间的耦合问题。根据附加横摆力矩设计车轮驱动/制动力矩分配控制器。通过仿真验证控制策略,并与单纯AFS+ARS、传统PID的DYC及差压制动DYC进行对比。
1 横摆角速度与质心侧偏角耦合分析
4WIS-4WID车辆前后轮都可根据要求进行转向,并且可通过独立驱动/制动施加横摆力矩,其2自由度状态方程为
(1)
式中:m为车辆质量;a、b分别为车辆质心至前轴和后轴的距离;L为轴距;Iz为车辆绕z轴的转动惯量;k1、k2分别为前、后轴的侧偏刚度;ΔM为附加的补偿力矩;δf为前轮转向角;δr为后轮转向角;vx为车辆纵向速度;β为质心侧偏角;γ为横摆角速度。
(2)
由式(2)可见,前、后轮转向角和横摆力矩对β、γ的影响相互耦合,不能通过某种方式单独地影响β或γ。
2 控制策略
2.1 名义值的确定
在文献[7]和文献[8]中均提出用线性2自由度车辆模型计算名义值的方法,名义横摆角速度γd为
γd=min{|γ|,|γmax|}·sgn(δ)
式中:δ为驾驶员前轮输入;μ为路面附着系数;g为重力加速度。取名义质心侧偏角βd=0。
2.2 AFS和ARS的实现方法
设计AFS+ARS的SMVSC控制器,得到其控制规律:
U=(CB)-1C[Ade+(Ad-A)x+BdUd]+(CB)-1Gsgn(s)
(3)

详细推导过程见文献[9]。
分别在路面附着系数为μ=0.8和μ=0.1两种路况下进行仿真,结果如图1所示。施加前轮参考转角为幅值0.1rad、频率2π/25的正弦信号,初始车速为180km/h。基于SMVSC的AFS+ARS控制与典型的前馈比例ARS[10]相比,AFS+ARS表现出明显的优越性,但在μ=0.1时,AFS+ARS也不能很好地跟踪名义值。为了应对极限工况,须加入DYC对误差进行修正,以提高系统稳定性和精准性。
2.3 直接横摆力矩控制器(上层控制器)的设计
4WIS-4WID车辆的2自由度状态方程形式结构简单,便于控制器的设计。但它忽略了车辆系统的非线性和外在干扰等因素。为了使设计的控制器能适用于实际车辆和工况,须同时满足抗干扰性和精确性的双重要求,而滑模变结构控制恰好满足该要求。滑模变结构属于一类特殊的非线性控制系统,这种控制能增强系统对不确定性和外部扰动的抗干扰能力。
2.3.1 横摆角速度滑模变结构控制律(γ_SMVSC)
由线性2自由度车辆模型可知,车辆的航向角为质心侧偏角与横摆角之和,即
如果质心侧偏角较小忽略不计,则航向角主要由横摆角决定。航向角越大,车辆的转弯半径越小;反之转弯半径越大。因此,当质心侧偏角较小时,横摆角速度决定了车辆的运动状态[11]。为此设计了用于DYC的横摆角速度滑模变结构控制律。

其中
用等速趋近律来设计滑模控制律,令
(4)
2.3.2 质心侧偏角滑模变结构控制律(β_SMVSC)
当轮胎与路面附着系数减小时,横摆力矩将随质心侧偏角增加并迅速趋于恒定值。即路面摩擦因数越低,质心侧偏角对稳定性的影响越敏感,所允许的最大质心侧偏角也越小,通过转向操纵来产生横摆力矩将越来越困难。因此,在低附着系数路面上更应严格限制车辆的质心侧偏角,才能避免车辆失稳。这是将质心侧偏角选为稳定性控制系统控制变量的一个重要原因[11]。为此设计用于DYC的质心侧偏角滑模变结构控制律。

其中
用等速趋近律来设计滑模控制律,令
得到控制律
(5)
2.3.3 稳定性证明

对于β_SMVSC有
代入ΔMβ:
证毕。
2.3.4 协调控制
协调控制器根据前述总体控制策略,按照|β|的大小,对横摆角速度滑模变结构控制律的输出ΔMγ和质心侧偏角滑模变结构控制律的输出ΔMβ进行加权协调,权值分别为ρ和1-ρ,根据稳定性与|β|的关系来确定ρ:
(6)
则控制器的最终输出控制律为
ΔM=ρΔMγ+(1-ρ)ΔMβ
2.3.5 抑制抖振
滑模控制在切换面的切换动作会造成控制不连续而产生抖振,抖振只能抑制而不能消除。应用中可采用连续函数代替符号函数sgn(s)来抑制抖振,以保证在切换面附近控制输入的光滑连续性。令sgn(s)=s/|s|≈s/(|s|+ε),其中ε为任意小的正数。
2.4 附加横摆力矩的驱动/制动协同分配(下层控 制器)
附加横摆力矩的分配多采用差压制动方法,单轮制动或单侧车轮制动[12-13]。本文中所设计的附加横摆力矩驱动/制动协同分配控制器,同时对两侧车轮分别施加驱动力矩和制动力矩,驱动侧和制动侧各分担0.5倍的ΔM,分配规则如表1所示。
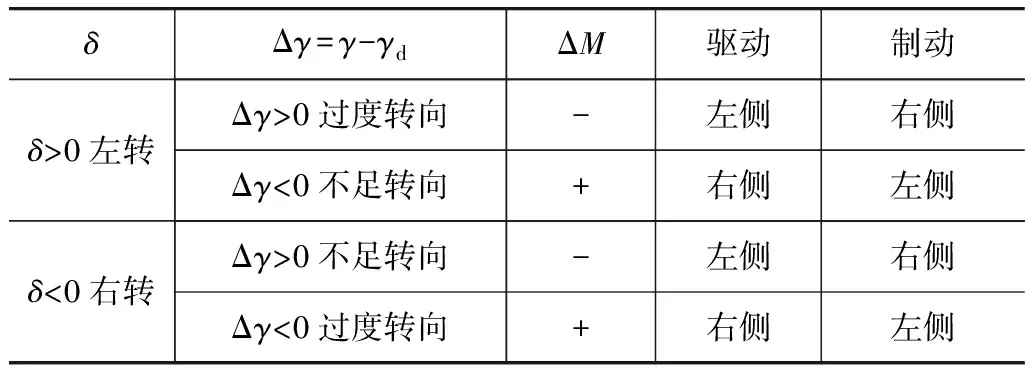
表1 附加横摆力矩的驱动/制动同步分配
汽车在行驶过程中,由于悬架和轮胎的作用,质心会发生前后和左右转移。为了更充分地利用车轮的驱动/制动力矩,须根据车轮载荷对前后车轮驱动/制动力矩进行再分配。详见文献[12]。
2.5 控制系统集成
总体控制策略,要求β和γ跟踪理想模型的名义值,将AFS+ARS和DYC有机地结合以充分发挥各自优点。
由式(3)~式(5)可见,AFS+ARS控制律和DYC控制律之间相互耦合。二者都依赖且直接影响γ和β,DYC控制律又依赖于AFS+ARS控制律的输出δf和δr。如果直接用被控对象的状态值γ和β作为二者的反馈,两个控制器以不同方式同时对相同的控制量进行控制,必会造成系统紊乱。
为解决上述问题,引入2自由度的4WIS-4WID车辆参考模型,其输出γr和βr作为AFS+ARS控制器的反馈。这样AFS+ARS的控制律将不受被控对象状态的影响,因而也不受DYC的影响;DYC所依赖的δf和δr也不会受到DYC自身的影响。而DYC的作用是对AFS+ARS的误差进行修正。以上策略消除了AFS+ARS和DYC之间的耦合,将控制系统集成。总体集成控制策略如图2所示。
3 控制策略仿真验证与分析
假设为水平路面,忽略滚动阻力的影响。仿真初始时前、后轮转向角,车辆侧向速度,车辆横摆角速度,质心侧偏角等初始值均为零。初始纵向车速为180km/h,路面附着系数为0.1时,驾驶员前轮输入转角为幅值0.1rad、频率2π/25的正弦信号,进行移线操作。为体现本文控制策略的优越性,在SAE标准坐标下,建立非线性16自由度4WIS-4WID车辆模型进行仿真,该模型包括整车纵向(沿x轴)、侧向(沿y轴)、垂直方向(沿z轴)、绕x轴的侧倾、绕y轴的俯仰、绕z轴的横摆、4个车轮的垂向运动、4个车轮的转动和前轮转向角、后轮转向角,共16个自由度。考虑实际车辆参数的不确定性,令16自由度车辆的质量为名义值模型的1.3倍,绕z轴的转动惯量为名义值模型的1.2倍,质心相对于名义值模型向后移动0.1m;外加侧向阵风力矩干扰为
Mdisturb=500sin(2πt/5-π/2)+500
(7)
在驱动/制动协同分配的方式下将AFS+ARS,AFS+ARS+传统PID的DYC,AFS+ARS+SMVSC的DYC进行对比;并在AFS+ARS+SMVSC的DYC的情况下对驱动/制动协同的分配方式和差压制动的分配方式进行对比。结果如图3~图8所示。
由图3可见,根据驾驶员前轮转角输入,AFS+ARS给出了相应的前、后轮转角。由图4可见,高速行驶在低附着系数的路面上,并加入车辆自身参数干扰和外界阵风干扰的极限工况下,本文中设计的γ_SMVSC和β_SMVSC协调控制策略均能很好地跟踪名义横摆角速度。采用当|β|较小时以横摆角速度跟踪为主,当|β|较大时以较小质心侧偏角为主的协调控制策略,兼顾了横摆角速度和质心侧偏角对车辆侧向稳定性的影响,解决了二者间的耦合问题。相对于传统PID的DYC,在面对车辆本身参数变化和外部侧向阵风干扰的情况下,γ_SMVSC和β_SMVSC协调控制表现出了很好的抗干扰性能和精准性。
由图4和图5可见,在本文中设定的极限工况下,单纯AFS+ARS已经不能保证车辆稳定,横摆角速度和质心侧偏角明显受阵风干扰跟踪不上名义值。加入SMVSC的DYC后,横摆角速度和质心侧偏角均可很好地跟踪名义值,且保证横摆角速度和质心侧偏角在同一相位,使在设定极限工况下的车辆系统仍保持稳定。
SMVSC由于其自身的结构特点,比传统PID有更强的鲁棒性和抗干扰性,但容易产生抖动,对执行机构有一定损害。由图6可见,采用连续函数代替符号函数的方法能较好地抑制控制器输出的抖振。
相对于差压制动的分配方式,驱动/制动协同分配的方式,对横摆角速度和质心侧偏角并没有直观的影响(图4和图5),这是因为轮胎的纵向力并未达到饱和,足以提供所需驱动/制动力;各个车轮的驱动/制动力峰值约为差压制动分配方式下的1/2(图7),拓展了系统的稳定域,减轻了单轮负担;对车速的影响较小(图8),有利于行驶中车速的保持。
4 结论
根据2自由度4WIS-4WID车辆模型,设计了γ_SMVSC和β_SMVSC,采用当|β|较小时以横摆角速度跟踪为主,当|β|较大时以较小质心侧偏角为主的协调控制策略,兼顾了横摆角速度和质心侧偏角对车辆侧向稳定的影响,解决了二者间的耦合问题。并通过连续函数代替符号函数的方法,较好地抑制了控制器输出的抖振。
对附加横摆力矩的驱动/制动协同分配拓展了系统的稳定域,减轻了单轮负担,削弱了DYC对车速的影响。
对AFS+ARS控制器不直接使用被控对象的状态量进行反馈,而使用4WIS-4WID 2自由度参考模型进行状态反馈,消除了AFS+ARS和DYC间的耦合,实现了控制系统的集成,使滑模变结构AFS+ARS和DYC有机结合,充分发挥了各自的优势。
研究结果表明,本文中设计的控制策略同时提高了系统的抗干扰性和精确性,使车辆更能应对极限工况,减轻了单轮负担,进一步提高了车辆的主动安全性能。
[1] 李彬,喻凡.四轮转向和差动制动联合控制的车辆横摆动力学[J].农业机械学报,2008,39(12):1-6.
[2] Wu Yihu, Song Dandan, Hou Zhixiang, et al. A Fuzzy Control Method to Improve Vehicle Yaw Stability Based on Integrated Yaw Moment Control and Active Front Steering[C]. Proceedings of the 2007 IEEE International Conference on Mechatronics and Automation,2007:1508-1512.
[3] 刘力,罗禹贡,江青云,等.基于广义预测理论的AFS/DYC底盘一体化控制[J].汽车工程,2011,33(1):52-55.
[4] 刘翔宇,陈无畏.基于DYC和ABS分层协调控制策略的ESP仿真[J].农业机械学报,2009,40(4):1-6.
[5] 王伟达,丁能根,刘辉,等.汽车DYC的LQG/LTR鲁棒控制方法研究[J].北京工业大学学报,2011,37(3):353-360.
[6] 杨福广,阮久宏,李贻斌.4WID-4WIS 车辆横摆运动AFS+ARS+DYC模糊控制[J].农业机械学报,2011,42(10):6-11.
[7] 王会义,宋健.汽车电子稳定程序的控制算法[J].清华大学学报(自然科学版),2007,47(2):224-227.
[8] 玄圣夷,宋传学,靳立强,等.基于多级鲁棒PID控制的汽车稳定性控制策略[J].吉林大学学报(工学版),2010,40(1):13-18.
[9] 杜峰,魏朗,赵建有.车辆主动转向的变结构控制器设计[J].交通工程学报,2009,9(1):35-39.
[10] 周慧会.汽车ESP/ASS、ESP/4WS的协调控制研究[D].合肥:合肥工业大学,2008.
[11] 周红妮,陶健民.质心侧偏角和横摆角速度对车辆稳定性的影响研究[J].湖北汽车工业学院学报,2008,22(2):6-10.
[12] 王伟,肖泽艳.基于横摆力矩的汽车稳定性控制策略[J].汽车工程师,2011(12):22-26.
[13] 唐耀朋.基于直接横摆力矩控制的汽车ESP控制系统研究[D].西安:长安大学,2009.
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
北京航空航天大学学报(2021年4期)2021-11-24
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
民用飞机设计与研究(2020年4期)2021-01-21
新课程·中学(2019年7期)2019-09-17
导航与控制(2019年2期)2019-06-12
中学生数理化·教与学(2019年5期)2019-06-06
中学课程辅导·教师通讯(2018年10期)2018-09-04
物理教学探讨(2018年1期)2018-02-13
汽车实用技术(2017年20期)2017-10-24
