
湖北白莲河抽水蓄能电站变形监测网观测与数据处理
2014-02-28 02:37甘孝清邹双朝
大坝与安全 2014年4期
甘孝清,邹双朝,马 祥
(1.长江科学院工程安全与灾害防治研究所,湖北武汉,430010;2.湖北白莲河抽水蓄能有限公司,湖北罗田,438617)
湖北白莲河抽水蓄能电站变形监测网观测与数据处理
甘孝清1,邹双朝1,马 祥2
(1.长江科学院工程安全与灾害防治研究所,湖北武汉,430010;2.湖北白莲河抽水蓄能有限公司,湖北罗田,438617)
首先介绍了湖北白莲河抽水蓄能电站变形监测网的布置概况及观测精度要求。在对现有的变形监测网观测方法进行对比分析的基础上,选择测量机器人与GPS方法同时应用于该工程的变形监测控制网观测中。处理结果表明两种方法的观测成果一致性很好,均能够达到二等变形监测网的精度要求,在观测效率和气候条件的影响上,GPS方法更具有优势。
白莲河抽水蓄能电站;变形控制网;测量机器人;GPS
1 变形监测网布置概况
湖北白莲河抽水蓄能电站位于湖北省黄冈市罗田县白莲河乡境内的白莲河水库右坝头上游侧,电站装机容量1 200 MW,其主要任务是承担华中电网的调峰、填谷、调频、调相与事故备用。电站上水库主要建筑物有1座主坝、3座副坝、1条环库路与上水库进/出水口等。为了监测电站上水库及建筑物的变形情况,在上水库库周布置了1个平面变形监测控制网(由8个网点组成),其中BL211和BL214为已知点,具体分布见图1。该控制网为二等边角网,要求每年至少复测一次,上水库蓄水前复测一次。
根据设计文件要求,变形监测控制网采用方向观测法进行观测,每个方向观测12测回,并且保证12个测回分别在上午、下午两个时间段完成。为了保证变形控制网的观测精度,必须在成像清晰、稳定的条件下进行观测,且观测过程中,待仪器温度与外界气温一致时才能开始观测。外业观测时,需要记录测站和各个目标点的气温、气压、湿度;外业结束后,对各条观测视线的气温、气压、湿度进行平均,再利用气象改正模型,对测量距离进行改正。具体各项观测技术要求见表1。
2 变形控制网观测方法选择
目前变形监测控制网常用的观测方法主要采用三角网法、边角网法和静态相对定位方法等,常用的观测设备主要为高精度的经纬仪、测距仪、全站仪、测量机器人及GPS静态相对定位系统。各观测方法和观测设备的测量指标、技术实用范围及特点统计如表2所示。

表1 上水库平面变形监测网观测技术要求Table 1 Technical requirements for upper-reservoir deformation monitoring

表2 现有变形监测网观测方法对比Table 2 Comparison of the observation methods by the existing deformation monitoring network
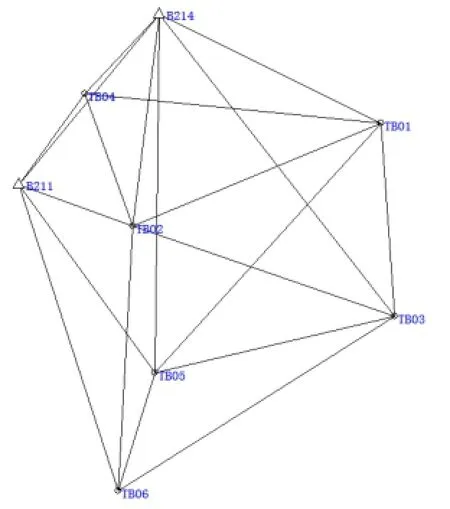
图1 上水库变形控制测网网图Fig.1 Deformation monitoring control network for the upper res⁃ervoir
经纬仪观测变形控制网时通常与测距仪配合使用,经纬仪测量各个控制网点之间的角度,测距仪测量两个控制网点之间的距离。测距仪观测对作业条件要求非常苛刻,特别是气象因素、温度因素等使得目标影像发生抖动,极大影响测量数据的精度。雨天和大坝泄洪期间,受雨滴和泄洪产生的水气雾化的干扰,传统的光学仪器测量方法无法实施变形观测。
测量机器人集成了伺服马达、CCD影像传感器、智能化控制软件,可自动寻找目标、自动调焦、自动照准、自动读数,可实现变形控制网观测全过程自动化。水电站大多位于高山峡谷间,两岸边坡较高,上午容易出现大雾天气,中午太阳直射山谷时日光强烈,影响外业施测精度。测量机器人进行边长观测时应尽量选择在日出后30~180 min,下午日落前180~30 min。应用测量机器人进行边角网观测需要选择合适的时间段,尤其应避开强光及大雾影响。
GPS作为现代大地测量的一种技术手段,可以实现三维大地测量,作业简单方便,具有测站间无需通视、能同时测定点的三维位移、不受气候条件的限制、易于实现全系统的自动化、可消除或削弱系统误差的影响和可直接用大地高进行垂直形变测量等优点。特别是应用于变形控制网观测时,主要关注两期所求得监测点坐标之间的差异,而不是监测点本身的坐标。这样两期监测中所含的共同系统误差只会分别影响两期的坐标值,但却不会影响所求得的变形量。目前利用GPS进行变形监测的最好精度约为±0.5 mm。
根据湖北白莲河抽水蓄能电站的现场条件和控制网观测精度要求,最终选择GPS观测方法和测量机器人观测方法对变形控制网进行观测。
3 GPS观测与数据处理
2011年10月,采用6台徕卡公司高精度双频GPS接收机对白莲河抽水蓄能电站变形监测控制网进行静态相对定位观测。将8个变形控制网网点分3个时段进行观测,每个时段长度大于4 h,保证不同时段有4台接收机同步,保证变形控制网中每个网点与其他网点均有基线连接,这样可提高控制网的可靠性和精度。
GPS数据处理过程大致分为原始数据下载、数据检查及预处理、基线解算、基线检核、三维无约束
网平差、二维约束网平差、平差精度统计等。外业观测完成后,采用徕卡公司的LGO 6.0基线计算软件进行基线处理。其中,TB06、TB01网点的周围有树枝遮挡,净空不是很好,需要删除部分卫星观测数据,提高变形控制网的基线质量。然后采用武汉大学科傻GPS数据处理软件进行三维无约束平差和二维约束平差,最后对平差的结果进行精度统计。
变形监测控制网参与平差的基线数39条,构成异步闭合环21个,同步环和异步环均不超限。环闭合差、三维基线向量无约束平差的点位误差统计见表3和表4。平均边长相对中误差为1/374405,最弱边TB05-TB06边长相对中误差为1/194000,达到二等变形监测控制网边长测量的精度要求。

表3 环闭合差精度统计表Table 3 Statistic of the precision of the ring closure error
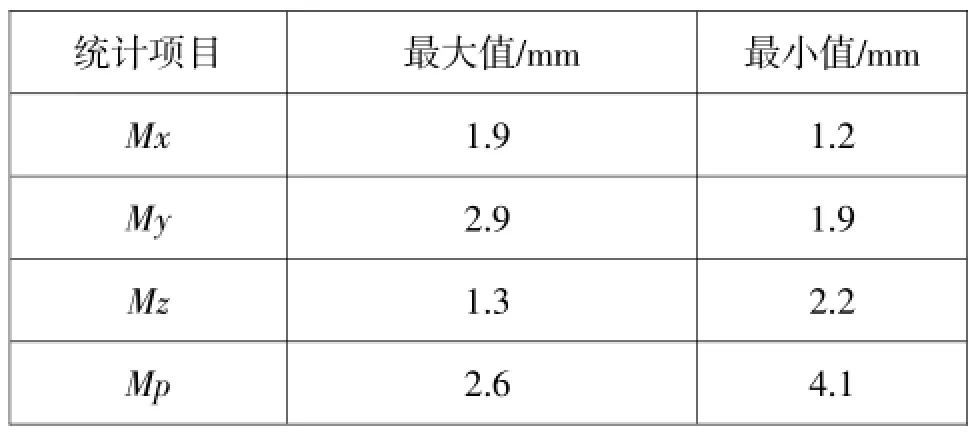
表4 三维基线向量无约束平差的点位误差统计表Table 4 Statistics of point measurement error of unconstrained adjustment of 3D base line vector quantity
4 测量机器人观测与数据处理
GPS方法观测完成后,采用瑞士Leica公司高精度全站仪TCA2003,并配备6套圆棱镜对变形监测控制网进行水平角、边长观测。全站仪测角精度为0.5",测距精度为1 mm+1 ppm,系统带有CCD技术、马达驱动技术,可实现棱镜目标自动识别与照准。在伺服马达驱动和机载自动化观测软件控制下,实现自动重复性观测,如多测回测距、测角、正倒镜等,避免了人工观测和人工照准的随机误差。同时采用7支通风干湿温度计和7台空盒气压表对测站与测点的温度、湿度和气压进行观测。
在每个测回始末,分别在测线两端点上测定温度、湿度和气压数据,温度读至0.1℃,气压读至0.1 hPa。读取气象元素时,气压表应置平,防止指针搁滞;温度计须悬挂在离地面约1.5 m左右或与测距仪近似同高、不受阳光直射、受辐射影响小和通风良好的地方。每条测距边往返观测各16次,边长观测时段差(或往返测互差)不得大于21+D2mm(式中D为测线长度,按km计)。
观测数据处理采用大地综合数据处理系统。首先设置控制网参数,包括坐标系统、投影高程面、仪器的加乘常数、大气折光系数、角度距离观测的各种限差等,将自动记录的观测数据按照规范表格生成水平角、天顶距、距离观测记录文件,并对角度观测数据质量进行统计。然后对边长观测数据进行气象改正、加乘常数改正、倾斜改正、投影改正、周期误差改正等。当角度观测、往返边长、往返测高差、三角形条件、极条件、正余弦条件等统计符合规范要求后,将已知数据、角度观测、边长观测数据组合成平差准备文件,最后进行经典控制网平差,平差成果精度统计见表5。统计结果表明,测量机器人观测能够满足湖北白莲河抽水蓄能电站变形监测网精度设计要求。
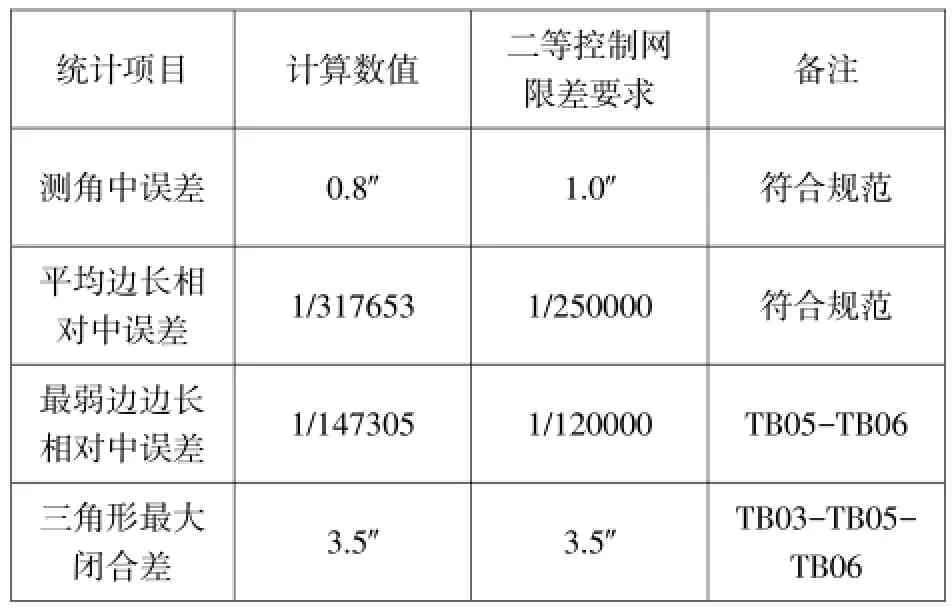
表5 变形监测控制网平差成果统计表Table 5 Statistics of adjustment rusults for deformation monitor⁃ing control network
5 测量机器人与GPS观测成果对比
为了验证GPS技术与测量机器人测量成果的
一致性,起算数据都采用固定B211和B214两个监测点进行约束平差,对两种观测方式数据处理后的平面边长、点位精度和点位较差进行了比较,结果见表6、表7和表8。
从表6、表7和表8可以看出,GPS测定的边长和点位精度与TCA2003相当。从两种不同测量方式计算结果较差统计来看,GPS静态相对定位观测与测量机器人观测的成果基本一致,两者成果较差在3 mm左右,不超过点位误差2倍准许范围,两者吻合性较好。
根据白莲河变形控制网的现场条件,分别对GPS和测量机器人的作业时间进行统计,见表9。从表9可以看出:采用测量机器人进行变形控制网观测时,外业需要总人天数为24 d,前提条件是在4 d的工作时间内,气象条件非常适宜光学仪器观测,如果遇到不良气侯条件,观测时间将需要更多。采用GPS技术进行观测时外业需要总人天数则较少,约为测量机器人的1/5,且人为干预少,不受气候条件影响,从数据采集到处理自动化程度较高,能及时、准确地得到可靠的观测成果。由此可以看出,GPS方法的观测效率明显优于测量机器人。
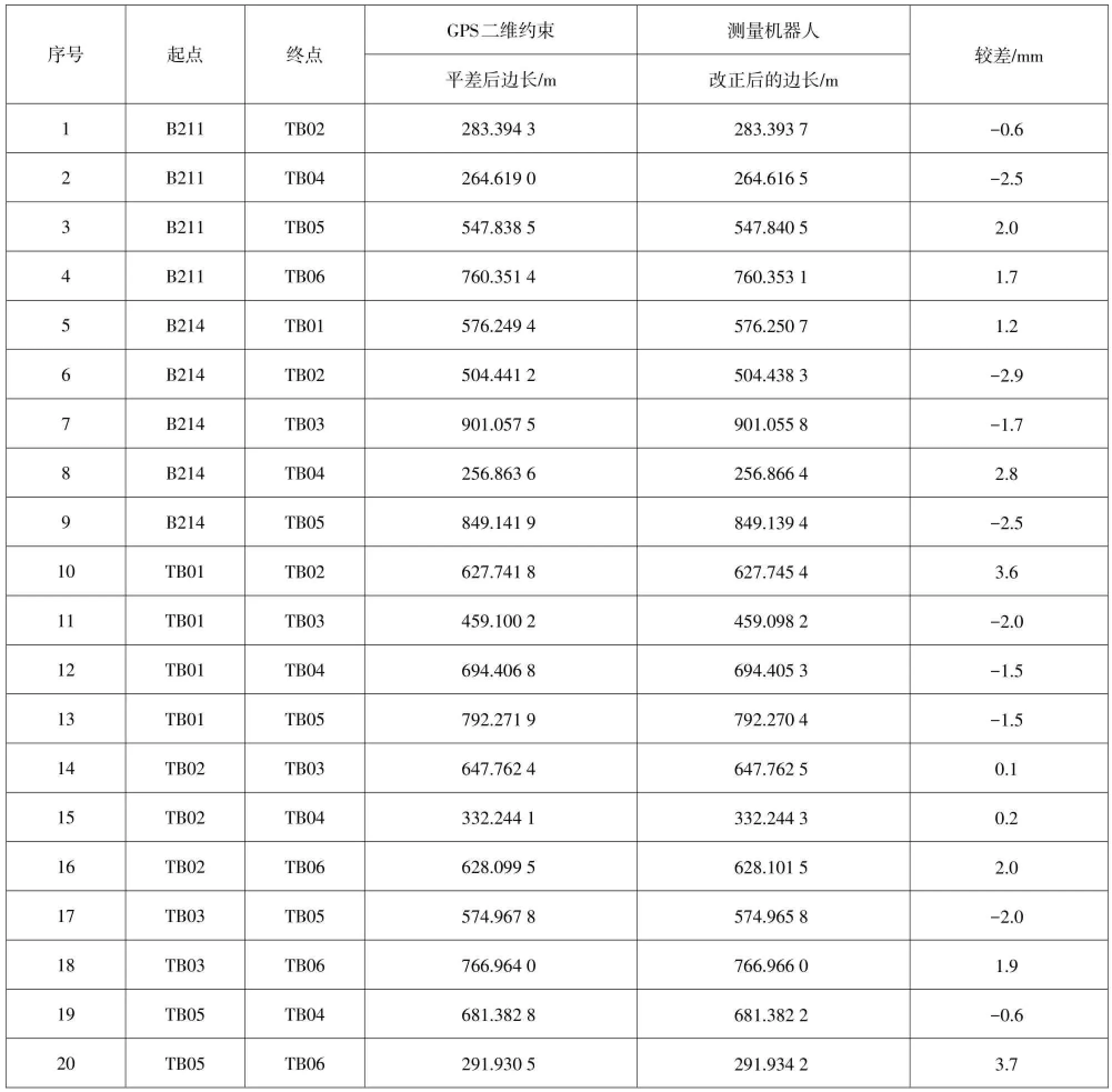
表6 边长较差表Table 6 Difference of side length

表7 点位精度比较表Table 7 Comparison of point precision
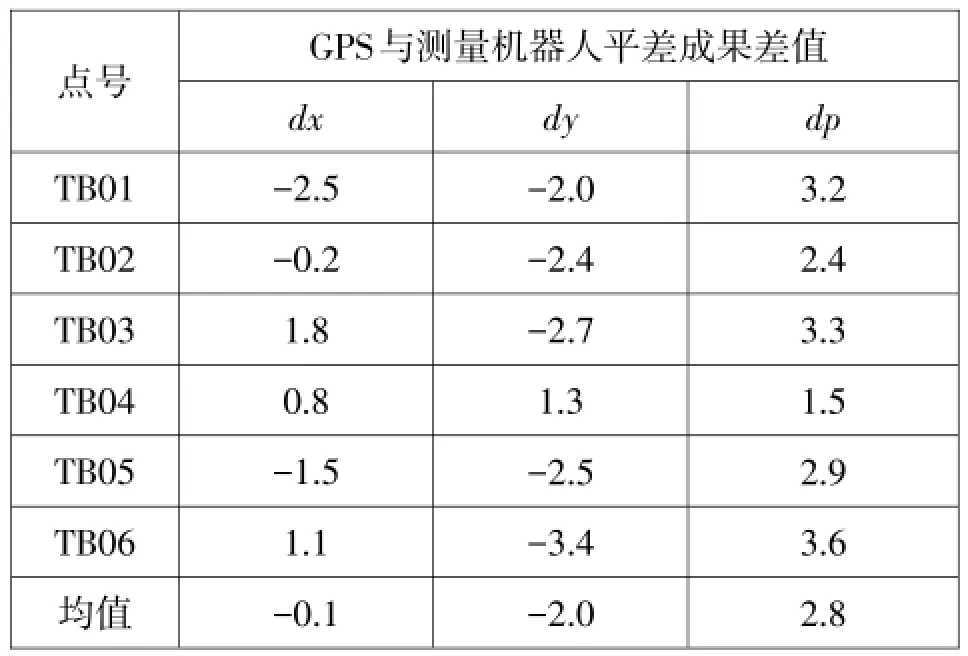
表8 平差成果较差表Table 8 Difference of adjustment results

表9 GPS与测量机器人作业时间比较表Table 9 Comparison of the working hours between the GPS and Georobot
6 结语
GPS观测方法与测量机器人观测方法在白莲河抽水蓄能电站变形监测网观测及数据处理中的应用表明,两者的观测成果比较吻合,均能达到二等变形监测网的精度要求,其中GPS观测方法不受气候条件影响,观测效率更高。如果电站运行期变形监测网复测采用GPS进行观测,固定相应的坐标框架、起算数据、处理软件模型,每次复测成果之间的较差也可以很好地反映出网点的位移量。虽然卫星信号被遮挡及多路径效应会影响GPS观测精度和可靠性,但随着各种全球定位系统卫星数量的增加,各种误差模型因素考虑得更加完善,GPS将能更好地满足变形监测网观测的精度要求。 ■
[1]李征航.GPS定位技术在变形监测中的应用[J].全球定位系统,2001(2):18-25.
[2]邹双朝,甘孝清,周武.GPS在湖北白莲河抽水蓄能电站变形监测网中的应用[J].长江科学院院报,2012(6):90-94.
[3]李征航,张小红,徐晓华.隔河岩大坝外观变形GPS自动监测系统的精度评定[J].哈尔滨工程高等专科学校学报,2000,11(3):1-6.
This paper describes basic situation and observation accuracy requirements of deformation monitoring network of Bailianhe pumped storage station.According to comparative analysis on existing observation technology,Georobot and GPS technology were applied to deformation monitoring control network in the Bailianhe Project.The observation results showed good consistency between GPS technol⁃ogy and Georobot,and both satisfied the accuracy requirement of second deformation monitoring control network,while GPS was of better observation efficiency and suffered less environmental influence.
Bailianhe pumped storage power station;deformation control network;Georobot;GPS
TV698.1
B
1671-1092(2014)04-0053-05
2013-09-27;
2013-11-12
甘孝清(1972-),男,湖北潜江人,博士研究生,主要从事岩土工程与水工结构安全监测、安全评价工作。
Title:Deformation monitoring network of Bailianhe PSPS and its data processing//by GAN Xiao-qing, ZOU Shuang-chao and MA Xiang//Engineering Safety and Disaster Prevention Research Department of Yangtze River Scientific Institute
猜你喜欢
小学生学习指导(中年级)(2021年10期)2021-11-01
小学阅读指南·教研版(2021年5期)2021-09-10
数学小灵通·3-4年级(2017年12期)2018-01-23
雨花(2017年17期)2017-12-06
东坡赤壁诗词(2015年3期)2015-08-15
导航定位学报(2015年2期)2015-06-05
中学数学杂志(高中版)(2015年3期)2015-05-28
铁路通信信号工程技术(2014年1期)2014-02-28
中国质量与标准导报(2013年8期)2013-03-11
意林(2009年23期)2009-05-14
