无人机软着陆气囊缓冲特性研究
2014-03-01 06:58蔡文李斌温金鹏王力
兵工学报 2014年11期
蔡文,李斌,温金鹏,王力
(1. 西北工业大学 航空学院,陕西 西安710072;2. 中国工程物理研究院,四川 绵阳621000;3. 西北工业大学 第365 研究所,陕西 西安710072)
0 引言
缓冲气囊作为常用的冲击缓冲装置之一,在空投防护,无人机着陆回收,地外星球探测器软着陆,汽车撞击防护,应急救援等领域均有大量应用[1-3]。就无人机回收而言,相较于滑撬减震器、反推火箭、滑跑着陆等其他回收装置,缓冲气囊具有附加质量轻、折叠性能好、包裹存储占位小、成本低廉、系统可靠等独特的优势。这些优势使其在无人机回收领域得到了持续的应用和发展。美国20世纪60年代初研制的USD-5 无人侦察机、AQM-34V 无人侦察机、加拿大的CL-89 战地无人侦察机、阿根廷的MQ-2 BIGUA,以及后来发展的英国CA3 无人侦察机、不死鸟无人侦察机,法国的SDTI 战术无人机,以色列的陨石B 微型无人机、云雀微型无人机等均采用了气囊缓冲回收技术[4-5]。近年来,国内对于软着陆气囊的研究日渐增多。戈嗣诚等[6]、张元明[7]研究了无人机软着陆气囊的缓冲原理与缓冲特性。王红岩等[8]通过试验和仿真研究了带侧壁附囊的自落充气式气囊的缓冲特性及其在重装空投方面的应用。文桂林等[9]、尹汉锋等[10]则研究了多种形式气囊的缓冲特性及缓冲气囊的优化设计问题。孙晓伟[11],王亚伟等[12]通过解析分析方法,计算分析了自落式气囊在货台空投着陆缓冲中的应用。吕航等[13]研究了梯形台式气囊在无人机回收中的应用,并讨论了缓冲着陆过程的机体侧翻问题。
1 基于解析模型的气囊参数确定
研究者前期研究[14-16]已经基于能量守恒和理想气体热动力学方程,建立了气囊的解析分析方法。利用该分析方法可快速进行变参分析,归纳出多参量之间的相互影响规律,确定各设计参数的可行域。
本文研究对象为总质量约300 kg 的上单翼无人机,计划在机身下部布置2 个方形排气式气囊进行缓冲。因此对于单个气囊设计来说,有效载荷质量m=150 kg,系统竖直方向初速为v0=6 m/s[9].根据工程设计要求,缓冲过程中的重心过载峰值≤10 g,同时规定无人机主缓冲过后的残余速度不得超过1.5 m/s. 需要确定的气囊设计参数包括:气囊底面积A、气囊高度h、排气口面积Abag、气囊内初始压力p0.
缓冲气囊设计首先要确定的参数是气囊的几何尺寸,即A 和h. 设计约束为:1)为保证缓冲系统的横向稳定性,A 和h 之间应保持合理的比值,本文取缓冲过程中最大过载与无人机主缓冲过程后的残余速度均需满足工程设计值。
基于解析分析算法,设定排气口面积Abag为0.013 m2,气囊初始压力等于外界大气压,排气口在气囊触地时刻打开。给定A 和h 的变化区间分别为0.2 ~0.8 m2和0.2 ~1.4 m,以一定步长离散两个参量的各自变化区间,然后两两组合离散参数,可循环计算获得各种参数组合情况下的着陆响应。图1和图2分别为根据计算结果所绘制的不同A 与h 组合下无人机残余速度和峰值过载的等高线图。图1中阴影部分为满足设计约束条件1 及残余速度限制条件的A 和h 的可行区域。相应图2中阴影部分为满足约束条件1 及最大过载限制条件的可行区域。两图阴影部分的交集即为满足2 个约束条件的参数可行区域。根据图1和图2,本文选取A =0.5 m2,h=0.8 m.

图1 不同气囊底面积和高度组合下系统残余速度等高线Fig.1 Contour plot of residual velocity for different combinations of airbag bottom area and height
排气型气囊设计中的另2 个重要参数是Abag和p0. 确定可行域时,先固定A、h 的取值。根据上文研究,此处设定A =0.5 m2,h =0.8 m. 与上文过程相似,图3和图4给出了不同Abag与p0组合情况下,计算所得的峰值过载和残余速度等高线。
图2 不同气囊底面积和高度组合下系统峰值过载等高线Fig.2 Contour plot of peak acceleration for different combinations of airbag bottom area and height

图3 不同排气口面积和初始压力组合下系统残余速度的等高线图Fig.3 Contour plot of residual velocity for different combinations of vent size and initial pressure
图4 不同排气口面积和初始压力组合下系统峰值过载的等高线图Fig.4 Contour plot of peak acceleration for different combinations of vent size and initial pressure
由图3和图4可见,初始压力对缓冲响应的影响非常微弱,因此该参数对气囊设计来说不是一个敏感参数。在排气口面积0.012 m2≤Abag≤0.018 m2时无人机的最大过载及残余速度均可满足要求。本文折中取排气口面积Abag=0.014 m2,初始压力p0=101 325 Pa.
至此,根据4 幅等高线图,已初步确定了缓冲气囊的各个设计参数。不过由于简化解析分析模型假设多个气囊之间的压缩变形同步,气囊变形规则无法考虑多点布局、着陆姿态、水平速度、地面摩擦等对缓冲过程的影响。因此解析分析对多气囊布局方案的适用程度有待进一步理清。
2 气囊缓冲系统有限元建模分析
2.1 有限元模型建立
有限元分析方法,可有效考虑解析建模过程所忽略的若干因素,可对多工况条件和多气囊布局方案有效进行描述。另外多气囊布局方案可能引起无人机着陆过程发生局部硬冲击或姿态翻覆,这一点在以往的研究论文中往往很少关注,常常只关注主缓冲过程。本节将从第1 节给出的气囊基本参数出发,建立无人机气囊缓冲系统的有限元模型,并应用LS-DYNA 软件进行无人机软着陆全程缓冲行为的仿真分析。
无人机模型的翼展7.4 m,机身总长3.25 m,质心(CG)距机头1.82 m. 针对此构型的无人机,选用4 点式的气囊布置方案。其中,机身下气囊Ⅰ和Ⅱ起主要的缓冲作用。机翼下的气囊Ⅲ和Ⅳ起保护作用,防止缓冲过程发生侧翻损坏机翼。由于无人机结构质心靠后,为了防止非对称力产生过大的俯仰运动,设计机身后气囊Ⅱ的底面积略大于机身前气囊Ⅰ,二者比值为1.16. 另外,机身后气囊Ⅱ的排气口面积也略小于机身前气囊Ⅰ的排气口面积。气囊具体布置方案如图5所示,气囊相关参数设置如表1所列。无人机左右翼下气囊完全相同,故在参数列表中,未对其进行区分。
图5 有限元模型Fig.5 Finite element model
有限元建模过程的其他相关简化处理及参数设置如下:
1)无人机触地前有3 m/s 的前向水平速度分量和6 m/s 的垂向下坠速度分量。
2)将燃油、发动机、仪器设备等简化为集中质量点,用质量元模拟;利用Shell 单元以及Beam 单元进行无人机相关主承力结构的离散。为简化计算,计算过程不考虑材料塑性,所有材料参数设置为线弹性。结构阻尼设定为比例阻尼。最终有限元离散得到的无人机结构总质量为297 kg.
3)着陆地面假设为刚性平面。
4)缓冲气囊用壳元离散,气囊内部气体视为理想状态气体,由于缓冲过程极短,系统与外界之间的热交换忽略不计。气体与气囊之间的作用采用控制体积(CV)法进行模拟[1]。CV 法关键在于当前时刻控制体积大小的确定。任意时刻控制表面所包围的体积可以表示成如下形式的表面积分:

式中:Γ 为控制表面;x 为选定的描述控制表面微元空间位置的坐标变量;nx是控制表面微元的法线方向与x 方向夹角的余弦;dS 是控制表面微元。其离散格式中是任一个表面单元i 的平均x 坐标;nix是单元i 的法向与x 方向夹角的余弦;Ai是单元的面积。因此,t+Δt 时刻控制体积可以表示为

表1 缓冲气囊基本参数设置Tab.1 Basic parameters of airbags
5)由于缓冲过程,无人机蒙皮、气囊系统、地面三者之间存在接触,并且压缩过程,气囊也会发生自接触,选用单面接触进行接触设置。
6)结构阻尼假设为比例阻尼。本算例中,根据工程经验,比例阻尼系数统一设定为0.1.
7)计算总时长设定为0.6 s,积分时间步长由软件按网格尺寸自行计算确定。对于本算例,机身结构离散后的壳元几何尺度约为100 mm×100 mm,积分时间步长为1.1 μs.
2.2 正常软着陆工况仿真分析
关于缓冲气囊LS-DYNA 仿真与试验结果的一致性验证,在相关文献[8,15]已有论及,这里不再论述。为了考查本文计算过程的相关计算参数设置是否合理,图6给出了仿真过程的滑移能和沙漏能变化曲线。整个仿真过程系统输出的沙漏能为0,说明结构中不存在不真实的零能变形模式。滑移能始终大于0,表示仿真过程接触设置成功,未有穿透现象出现。
计算得到的缓冲过程气囊变形及相关响应曲线如图7和图8所示。分析可知,气囊缓冲过程可分解为4 个阶段。开始阶段,缓冲系统以6 m/s 的下坠速度,3 m/s 的水平速度下落,机身缓冲气囊触地;第2 阶段,压缩储能阶段,继续下落的机体开始挤压气囊,动能转化为气体的内能,气囊内部压力增大,提供给机体反力,机体下落速度减小;第3 阶段,排气释能,随着机体的下坠挤压,气囊内压缩气体由排气口迅速排出,释放能量,消耗冲击能量,机体下坠速度进一步降低;着陆阶段,主缓冲行程结束后,无人机姿态经历短时晃动后软着陆。
图6 缓冲过程能量变化曲线Fig.6 Energy-time history in landing process
由图8可知,气囊主缓冲过程,产生的无人机质心过载峰值为9.5 g,主缓冲过程的吸能比达到81.8%,残余动能导致的二次硬冲击响应峰值低于4.0g. 结合图7、图8分析可见,气囊接地后,无人机整体平稳下落,对机身前后两气囊进行同步挤压。由于气囊Ⅱ体积大于气囊Ⅰ,故开始阶段气囊Ⅱ的压强略小于气囊Ⅰ的压强。同时由于无人机质心偏后,使得气囊Ⅰ提供的后仰力矩大于气囊Ⅱ提供的前俯力矩。另外,尾撑部分的向下惯性运动也会给机身附加上仰力矩,最终使得0.12 s 时无人机的机头开始上仰。此现象在0.16 s 进一步加剧,0.30 s左右上仰角度达到最大。由于上仰,无人机会进一步挤压气囊Ⅱ产生恢复力矩,从两气囊压强变化曲线可以看出0.15 ~0.34 s 内气囊Ⅱ压强始终大于气囊Ⅰ压强。0.40 s 左右无人机低头,此时无人机主要挤压气囊Ⅰ,故气囊Ⅰ在0.40 s 左右出现了第2 个峰值,机头随后在恢复力矩作用下再一次发生微幅的抬头运动。整个缓冲过程,飞机尾撑的变形最大,尾撑根部应力值得关注。
图7 缓冲过程无人机运动姿态Fig.7 Soft landing animation
图8 缓冲仿真结果Fig.8 Simulation results of landing process
3 气囊参数对缓冲特性的影响分析
为研究气囊关键设计参数对系统缓冲特性的影响。基于第2 节模型,进行了两个主缓冲气囊的变参分析。图9分别给出了气囊高度、排气口面积、排气口触发压差等主要设计参数对系统冲击响应的影响规律。分析可知,当气囊高度大于0.7 m 后,无人机质心过载峰值随着气囊高度的增加而减小。但需注意气囊过高会增加气囊系统的质量,也会破坏着陆姿态的稳定性。无人机质心过载峰值随排气口面积的增大而减小,不过这仅意味着排气口越大,主缓冲过程气囊压力峰值越低。实际排气口的确定还必须兼顾主缓冲结束后,系统残余速度的变化。排气口过小,系统反弹严重;排气口过大,吸能不充分,二次硬冲击风险高。图9(c)中排气口触发压差在0 ~10 kPa 之间变化时,系统峰值过载随触发压差的增加而减小。当触发压差在10 ~15 kPa 间变化时,峰值过载较低,且基本保持不变。当触发压差值大于15 kPa,峰值过载随触发压力的增加而增大。因此10 ~15 kPa 应是排气口触发压差的最优取值区间。
另外图9(a)、图9(b)中也给出了解析模型计算结果与有限元仿真结果之间的对比。对比分析可见,在正常着陆工况下,仿真得到的参数影响规律与单气囊解析分析得到的参数影响规律基本一致,但在具体数值上二者之间还是存在5% ~12.5%的差异。导致差异的主要原因在于:解析分析方法默认前后气囊压缩同步、气囊体积规则变化、忽略地面摩擦、忽略织布弹性等。因此实际应用中,若侧重于气囊缓冲行为的定性分析和气囊设计参数的初步确定,使用解析分析方法可高效获得可靠的结果。但如需关注缓冲过程中的具体细节情况,或着陆工况使得气囊存在不同步压缩的情形,则需采用有限元仿真方法。
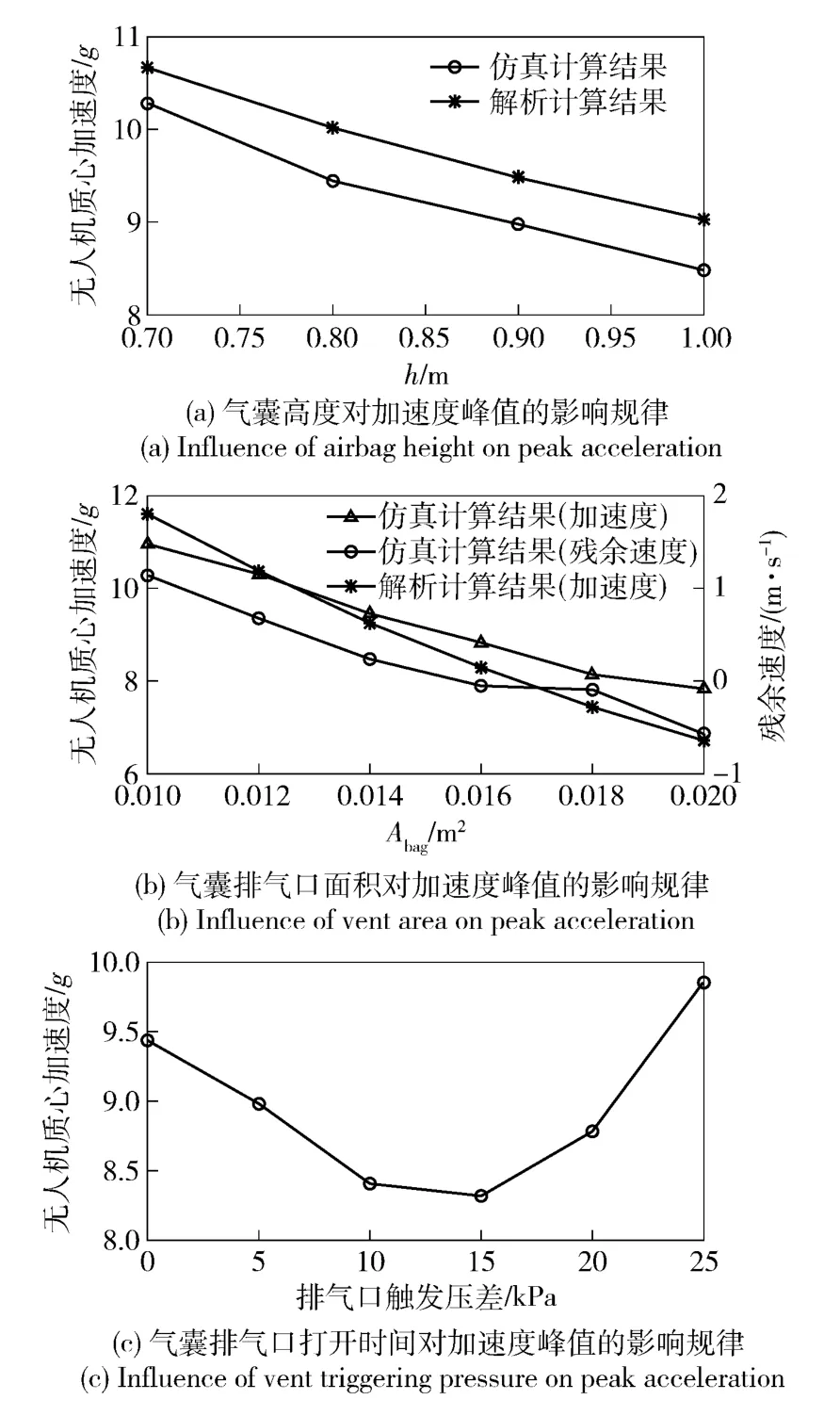
图9 气囊各设计参数对过载峰值的影响规律Fig.9 Influence of airbag parameters on peak acceleration
4 非正常工况着陆分析
4.1 10°俯仰角着陆
受着陆场地坡度或无人机质心失调影响,无人机伞降触地前可能出现以一定俯仰角触地的姿态。本节研究带10°俯仰角着陆时,气囊系统的缓冲行为。模型建立是以图5的现有模型为基础,不改变其他参数设置,只是将无人机系统的全体单元绕质心后仰旋转10°.
由于初始后仰角的存在,机身下两主缓冲气囊不再同步压缩。缓冲过程变形及响应曲线如图10~图12所示。分析可知:机身后气囊首先触地,对机身产生缓冲反力,同时提供低头力矩,使无人机着陆姿态趋于水平;随后,机身前气囊开始触地发挥缓冲作用,并提供抬头力矩。系统质心过载响应在前气囊压缩最大时刻达到首次峰值。由于前后气囊反力不同步,使得无人机结构在前后气囊的交叉作用下,发生多次往复的俯仰运动,图11显示了二次往复俯仰过程的质心角速度变化历程。这种显著的姿态俯仰运动将导致无人机出现二次硬冲击的风险。观察缓冲过程的质心过载响应曲线可见,主缓冲过程导致的质心过载峰值不过7.65 g,低于正常着陆工况的响应峰值9.5 g. 但后续缓冲过程的第2 个过载响应峰值高达17.6 g,且该峰非常尖锐,属二次硬冲击所致,且远高于正常着陆工况的二次过载。进一步考察二次硬冲击时刻对应的机体应变云图可知,后机身下部出现了明显的应力集中区,最大应变达6 649×10-6,可能导致局部机体损坏。另外从缓冲过程的无人机动能变化曲线(见图19)可知,在气囊主缓冲结束后(选0.3 s 为统一截止时间),正常着陆工况和非正常着陆工况的剩余动能基本相当。不过在同等剩余动能的条件下,10°俯仰角着陆工况会加剧机体的前后俯仰运动,并导致较正常着陆工况更严重的二次硬冲击响应。
4.2 10°滚转角着陆
无人机伞降着陆过程受着陆地形或横风等意外因素影响,可能发生倾斜着陆的情况。本节在图5基本模型的基础上,通过网格旋转得到带10°滚转角着陆的有限元模型。
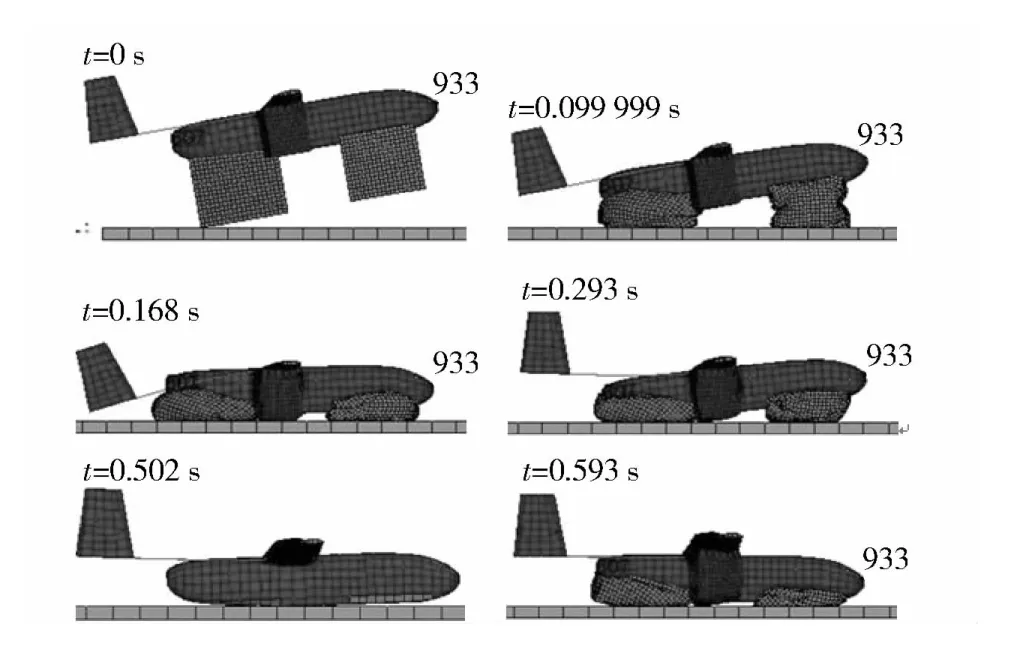
图10 缓冲过程无人机运动姿态图(0.5 s 去除了气囊)Fig.10 Soft landing animation

图11 无人机俯仰角速度Fig.11 Pitch rate of UAV
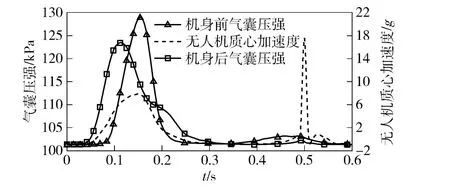
图12 缓冲仿真结果Fig.12 Simulation results of landing process
图13给出了缓冲过程的响应曲线,从气囊压强变化曲线可以看出,无人机带10°滚转角下落时,机身前后两气囊的缓冲压力基本同步变化。过载响应达到第1 次峰值的时刻与正常着陆工况基本一致,峰值大小比则正常着陆工况略高0.5 g. 原因在于系统达到初次过载峰值时,右翼气囊(图14中的右侧气囊)参与压缩缓冲,贡献了部分缓冲反力。另外由缓冲过程的无人机动能变化曲线(见图19)可知,由于翼下气囊的作用,在主缓冲结束时刻(0.3 s),10°滚转角着陆工况的剩余动能略低。
不过由于反作用力矩的不平衡,在缓冲过程中,机体系统会发生一定程度的往复滚转和俯仰运动,其中往复滚转运动更显著。图14所示为从前视角度给出的无人机着陆姿态图。分析可见,机翼右气囊先接地,产生逆时钟方向滚转力矩,改变无人机的着陆姿态。随后机翼左气囊开始接地,产生反向滚转力矩。无人机在左右气囊交叉作用下,逐渐恢复水平姿态。同样,对于本工况,由于排气型气囊在缓冲终了阶段不能提供软支撑,剩余动能仍将导致机体发生二次硬冲击。对比图19中的动能变化曲线可见,虽然带滚转角着陆工况的二次冲击前的剩余动能最低,但其引起的二次硬冲击过载依然达到了5 g(0.403 s),高于正常着陆工况。二次硬冲击产生的机身局部最大应变为4 343×10-6. 分析导致结构局部应变过大的原因有:一是姿态晃动,速度分布不均,导致局部硬冲击响应增大;二是带滚转角着陆时,机身下气囊发生了横向偏置变形,使得硬冲击时气囊的包裹防护能力减弱。
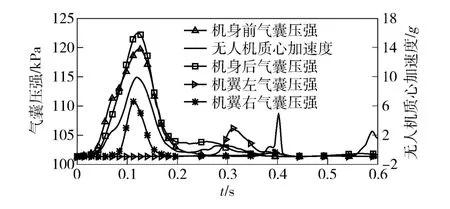
图13 缓冲仿真结果Fig.13 Simulation results of landing process
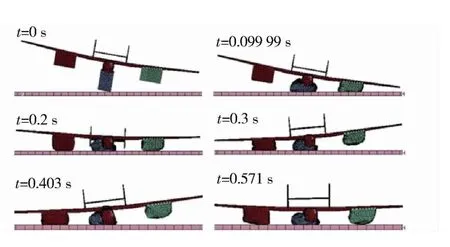
图14 缓冲过程无人机运动姿态图Fig.14 Soft landing animation
5 组合型气囊缓冲特性分析
前文研究表明,在多气囊布局情况下,多气囊之间不可能按理想状态始终提供同步平衡的缓冲反力,因此无人机软着陆缓冲过程会不可避免地出现一定的俯仰或滚转运动。特别当无人机以非正常着陆姿态着陆时,主缓冲结束后机体的姿态角运动较为严重。单纯排气型气囊不能在缓冲后段提供有效的软支撑能力,剧烈的姿态晃动可能给机体带来严重的二次硬冲破坏。
为了避免二次硬冲击带来的意外损害,设计者期望在缓冲结束阶段,气囊能够保有一定的软支撑作用,故而引入了组合型气囊。组合型气囊是指排气型气囊和密闭式气囊的组合气囊,密闭气囊可在缓冲终了时刻提供软支撑[15]。
本节将在图5所示基本工况模型的基础上,建立如图15所示的组合型气囊模型(具体建模方法同2.1 小节),并对比分析组合型气囊对非正常着陆工况的适用性。其中,内气囊Ⅴ和Ⅵ为密封型气囊,高0.2 m;外气囊为排气型气囊,各参数设置同表1. 为了清楚表示密封型气囊位置,图15隐藏了Ⅰ、Ⅱ气囊的侧面。

图15 组合型气囊有限元模型Fig.15 Finite element model with hybrid airbag
5.1 10°俯仰角着陆
由图16可见,使用组合型气囊进行缓冲时,由于内气囊的存在,外排气型气囊的有效容积有所减小,气囊压强峰值增大,使得无人机质心过载峰值略有上升。但从气囊压强变化曲线及无人机质心过载曲线可以看出,缓冲后段,密封型气囊Ⅴ和Ⅵ出现了多次的不同步压力峰值,说明机体发生了多次往复的俯仰运动,对前后密封气囊带来不同步的挤压。这种运动,同时也使得无人机质心过载曲线出现多次峰值但后续过载峰值均不超过3g,且机体结构上也没有出现局部应变过大的情形,说明缓冲后段,内置的密封型气囊为无人机提供了有效的软支撑缓冲作用。
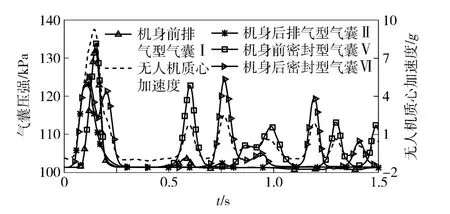
图16 缓冲仿真结果Fig.16 Simulation results of landing process
进一步分析组合气囊方案在主缓冲后的无人机运动姿态(如图17)发现,内置密闭气囊Ⅳ在0.15 s左右开始发挥作用,此时对应的无人机下落速度约为2 m/s. 前后密闭气囊提供的不同步支反力,使得无人机发生了多次往复俯仰运动。虽然此时俯仰运动的幅度要大于单纯排气型气囊方案,但这些后续姿态晃动仍处于可控的范围内,未带来局部的硬冲击。
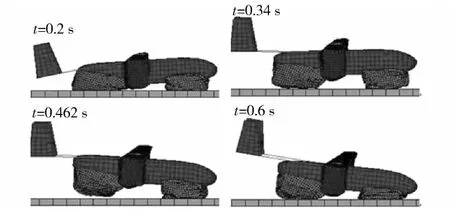
图17 缓冲过程无人机运动姿态图Fig.17 Soft landing animation
5.2 10°滚转角着陆
类似于带俯仰角时的下落分析,结合无人机质心过载曲线及气囊压强变化曲线(见图18)可知,内置密封气囊为缓冲后段提供了有效的软支撑,但密封气囊的作用会在缓冲后段产生较大的反弹运动。由图19给出的缓冲过程动能变化曲线可知,组合式气囊方案带10°滚转角着陆时,缓冲后段的无人机动能波动最大,说明该工况下缓冲后段的无人机反弹运动最为剧烈,不过从过载响应曲线及机体应变响应来考查,本工况相对于单纯排气型气囊方案而言,二次冲击过载响应和最大应变响应均大幅减小。
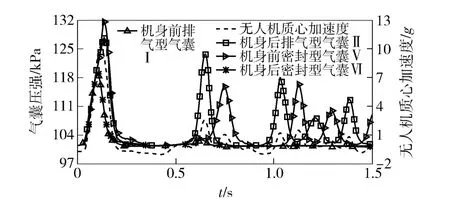
图18 缓冲仿真结果Fig.18 Simulation results of landing process
当然,以上分析仅针对2 种非正常着陆工况进行,本文在计算过程中认识到,虽然组合型气囊可以在缓冲后阶段有效消除单纯排气性气囊的二次硬冲击风险,但另一方面密闭气囊的作用会带来缓冲后期的姿态反弹失控的隐患。因此在实际工程设计过程中,还值得围绕密闭气囊与排气型气囊的参数匹配问题,开展更深入的多工况优化设计研究。

图19 着陆过程无人机动能变化曲线Fig.19 Kinetic energy-time history of UAV
6 结论
本文以上单翼布局无人机模型为对象,提出一种多气囊布局方案,并分别应用解析模型和有限元模型开展了多种着陆工况下的系统缓冲特性分析,相关结论如下:
1)正常着陆工况下,本文提出的单纯排气型气囊设计方案和组合式气囊设计方案均可满足设计对象的软着陆指标要求,但单纯排气型气囊方案在非正常着陆工况条件下,难以避免二次局部硬冲击带来的局部过载破坏。组合型气囊方案可在缓冲后期为无人机提供有效的软支撑,有效降低了二次硬冲击的风险。
2)对多气囊布局方案,解析模型能用于正常着陆工况分析,但只能分析主缓冲过程。在解析模型的可适用范围内,解析模型得到的气囊设计参数影响规律与有限元仿真基本一致,但解析模型与有限元模型的具体结果之间保持有5.0% ~12.5%的差异。有限元分析方法的适用范围更广,可有效考虑多气囊布局方案的不同步压缩、气囊不规则压缩变形、系统姿态变化、地面摩擦及织布特性等多种因素的作用,且可有效捕捉系统在主缓冲过后阶段的着陆行为。
3)多气囊缓冲着陆时,无人机姿态不可避免地会发生往复晃动。尤其当无人机带有一定俯仰角或滚转角以非正常姿态着陆,姿态晃动幅度会进一步加剧。对单纯排气型方案,在总体剩余动能相当的前提下,姿态晃动幅度越大,二次硬冲击引起的响应将越高,升高了局部损害的风险。
4)组合型气囊可以在缓冲后段提供有效软支撑,有效保护机头机尾。不过内置密闭气囊的引入,也会带来姿态反弹失控的隐患。当前设计方案对本文所研究的3 种着陆工况带来的反弹量都处于可接受范围内,但针对更复杂的工况条件,还需针对密闭型气囊与排气型气囊的参数匹配问题进行多工况优化设计研究。
References)
[1] 温金鹏,李斌,杨智春. 缓冲气囊冲击减缓研究进展[J]. 宇航学报,2010,31(11):2438 -2447.WEN Jin-peng,LI Bin,YANG Zhi-chun. Process of study on impact attenuation capability of airbag cushion system[J]. Journal of Astronautics,2010,31(11):2438 -2447.(in Chinese)
[2] Richard B T,Robin C H,Cliff E W,et al. Modeling and simulation of the second-generation Orion crew module airbag landing system[C]∥AIAA Space 2009 Conference & Exposition.Pasadena,Washington:AIAA,2009.
[3] Allouis E,Ellery A,Welch C S. Entry descent and landing systems for small planetary missions:parametric comparison of parachutes and inflatable systems for the proposed vanguard mars mission[J]. Acta Astronautica,2006,59(8):911 -922.
[4] 樊邦奎. 国外无人机大全[M]. 北京:航空工业出版社,2001.FAN Bang-kui. Introduction of foreign unmanned aerial vehicles[M].Beijing:Aviation Industry Press,2001. (in Chinese)
[5] Turner C T,Irard L A. Airbag impact attenuation system for the AQM-34V remote piloted vehicle[J]. Journal of Aircraft,1982,19(11):984 -989.
[6] 戈嗣诚,施允涛. 无人机回收气囊缓冲特性研究[J]. 南京航空航天大学学报,1999,31(4):458 -463.GE Si-cheng,SHI Yun-tao. Study on cushioning characteristics of airbags for RPV recovery[J]. Journal of Nanjing University of Aeronautics & Astronautics,1999,31(4):458 -463. (in Chinese)
[7] 张元明. 无人机回收减震气囊的理论研究[J]. 液压与气动,2005,(1):7 -9.ZHANG Yuan-ming. Study of air bag impact attenuation system for UAV[J]. Chinese Hydraulics and Pneumatics,2005,(1):7 -9. (in Chinese)
[8] 王红岩,洪煌杰,李建阳,等. 空降车缓冲气囊系统特性仿真及其参数优化方法研究[J]. 兵工学报,2012,33(12):1461 -1466.WANG Hong-yan,HONG Huang-jie,LI Jian-yang,et al. Research on simulation and optimization of cushion characteristic of airbag for airborne vehicle[J]. Acta Armamentarii,2012,33(12):1461 -1466.(in Chinese)
[9] 文桂林,雷志华,尹建武,等. 全向式多室连通气囊的缓冲特性研究[J]. 振动与冲击,2013,32(8):13 -17.WEN Gui-lin,LEI Zhi-hua,YIN Jian-wu,et al. Cushion characteristics of an omni-directional and multi-chamber airbag[J]. Journal of Vibration and Shock,2013,32(8):13-17. (in Chinese)
[10] 尹汉锋,文桂林,韩旭. 空投设备缓冲气囊的优化设计[J].系统仿真学报,2008,20(5):1325 -1327.YIN Han-feng,WEN Gui-lin,HAN Xu. Optimal design of airbag impact attenuation system for airdropping equipment [J].Journal of System Simulation,2008,20(5):1325 -1327. (in Chinese)
[11] 孙晓伟. 自落式缓冲气囊设计计算的一般方法[J]. 中航救生,2005(4):29 -31.SUN Xiao-wei. General methods for gravity type airbag design[J].China Aeronautical & Astronautical Life-support,2005(4):29 -31.(in Chinese)
[12] 王亚伟,杨春信,柯鹏. 货台空投系统气囊缓冲过程仿真[J].系统仿真学报,2007,19(14):3176 -3179.WANG Ya-wei,YANG Chun-xin,KE Peng. Airbag cushion process simulation for cargo airdrop system[J]. Journal of System Simulation,2007,19(14):3176 -3179. (in Chinese)
[13] 吕航,何欢,陈国平. 气囊式无人机缓冲系统的着陆侧翻现象[J]. 航天返回与遥感,2013,34(1):21 -28.LYU Hang,HE Huan,CHEN Guo-ping. Landing turn-over of UAV with airbag cushion system[J]. Spacecraft Recovery & Remote Sensing,2013,34(1):21 -28. (in Chinese)
[14] Esgar J B,Morgan W C. Analytical study of soft landing on gasfilled bags[R].District of Columbia,Washington:NASA,1960.
[15] 温金鹏. 气囊缓冲动力学问题研究[D]. 西安:西北工业大学,2011.WEN Jin-peng. Research on impact attenuation capability of airbag cushioning system[D]. Xi'an:Northwestern Polytechnical University,2011. (in Chinese)
[16] Wen J P,Li B,Yang Z C. Study on cushioning characteristics of soft landing airbag with elastic fabric[J]. International Journal of Applied Electromagnetics,2010,33(3/4):1535 -1545.
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
北京航空航天大学学报(2022年5期)2022-06-06
北京航空航天大学学报(2021年4期)2021-11-24
科技风(2021年18期)2021-07-14
包装学报(2021年1期)2021-04-29
中国科技纵横(2018年7期)2018-05-22
汽车实用技术(2017年20期)2017-10-24
中国汽车界(2016年1期)2016-07-18
学苑创造·C版(2015年9期)2015-11-26
民用飞机设计与研究(2015年4期)2015-02-20