
电动轮汽车差速助力转向路感分析
2014-03-13 11:40冒小文
北京汽车 2014年3期
冒小文,李 军,刘 昭
(重庆交通大学 机电与汽车工程学院,重庆 400074)
0 引 言
轮毂式电动汽车是当下一种比较新颖的电动汽车驱动形式[1]。各个车轮是由独立控制的电机分别驱动,取消了传统汽车中的离合器、变速器、主减速器以及差速器等部件,使得动力与车轮之间,以及车轮与车轮之间没有了较为传统的机械传动,减少了动力的损耗。也就是说,车轮即电机,无传动,无机械损耗,因而电动轮成为未来电动汽车的发展方向。轮毂式电驱动系统有直接驱动式电动轮和带轮边减速器电动轮两种基本形式。互不干扰的轮毂电机为其提供动力,ECU可独立控制驱动转矩,从而输出不同的值[2]。在电动轮汽车和传统动力转向技术基础上,发展新型电动轮汽车差速助力转向系统,不仅能实现汽车转向轻便性和转向路感的完美融合,而且还能将汽车的安全性与灵活性有机地融合在一起,是一种理想的汽车动力转向技术,具有广阔的应用前景。因此,开展电动轮汽车差速助力转向多目标优化设计方法研究势在必行[3]。
1 电动汽车转向系统数学模型
1.1 考虑车身侧倾的3自由度操纵模型[4]
在2自由度基本操纵模型的过程中,将车辆视为一个整体,定义了2个参考基,分别为地面参考基G和车辆参考基A。采用拉格朗日方法建立考虑车身侧倾的3自由度操纵模型,在上述2个参考基的基础上再定义1个与车身运动的参考基B。
定义一个参考点 O,为通过簧载质量质心的垂线与侧倾中心轴的交点,将车辆坐标系 a的原点定义在O点,如图1。其运动方程为:
1.2 转向轴模型
转向轴的动态方程[5]:
式中,Js为转向轴转动惯量;θs为转向轴的旋转角;Md为转向盘转矩;Ks为刚性系数;x为齿条的位移量;rs为齿轮半径;bs为阻尼系数。
其中,
θe为输出轴的旋转角
Me为扭杆的反作用转矩。
将式(3)和式(4)代入式(2)得
1.3 永磁无刷直流轮毂电机模型
直流电机是实现机械能与直流电能相互转换的电磁机械装置[6]。直流电动机具有良好的调速性能,调速范围宽,精度好,平滑性好,且调节方便,还具有较强的过载能力和优良的起动、制动性能,因此特别适合于要求宽调速范围的电气传动和有特殊性能要求的自动控制系统中。其中,以永磁体励磁的直流电机应用广泛,如轿车中的起动机,风窗刮水器等。采用电子换向的直流电机被称为无刷直流电动机,其工作原理如图2所示[7]。
其运动方程为
其中,CT为转矩常数,p为极对数;dr为电枢直径;z为电枢绕组的导体总数;fav为一根导体上产生的平均电磁力;τp为极矩;Bav为每极平均气隙磁通密度;le为铁心的有效长度;Ia为每根导体中的电流;Ф为每极主磁通。
1.4 输出轴子模型
对转向管柱输出轴进行整体隔离并分析其动力学,考虑转动惯量以及阻尼系数的影响,得到下面的运动方程[8]
其中,Je为输出轴的转动惯量;Be为输出轴的阻尼系数;n1为转向杆到驱动轮的传动比;Mr为输出轴的反作用转矩。
2 差动助力转向系统的路感分析
2.1 转向路感传递函数
路感是一种路面信息,并且将路面信息从地面传递给驾驶员[9]。文中采用固定转向盘的方法,即θs=0,来分析路感。
则
假设轮毂电机采用电流控制策略,可得
由于车辆转弯时,不应改变车辆纵向速度和加速度,所以在分配驱动转矩的时候应该满足
其中,η为前轴转矩占总转矩的比例;T0为总转矩;ΔTm为左右前轮转矩差。
轮毂电机转矩增益应满足
K0为左右轮毂电机转矩增益;Km为左右轮毂电机转矩差增益。
由式可得
综上所述,转向路感公式为
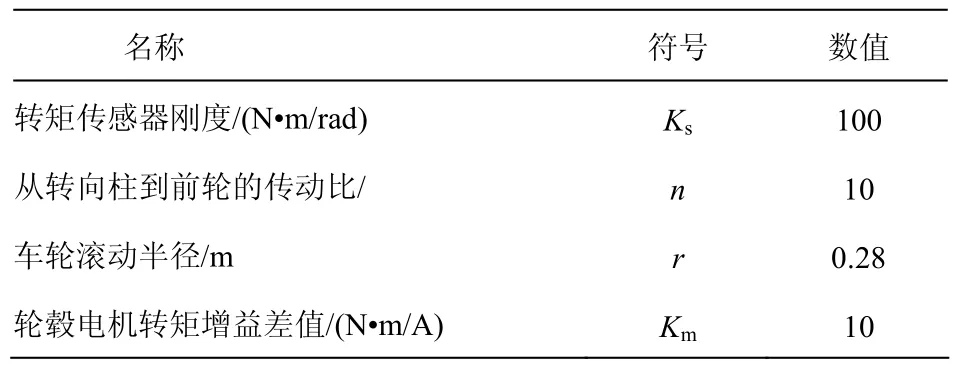
2.2 参数的设定
假设当改变某个参数来考察汽车转向特性时,其他所有参数都保持不变。

表1 转向路感参数
续表1
3 各参数对转向路感的影响
由传递函数(14)可知,主要有转向柱输出轴转动惯量Je,转向柱输出轴粘性阻尼系数 Be,转向柱到前轮的传动比n,轮毂电机转矩增益差值Km,以及转矩传感器刚度Ks影响转向路感。文中就以这5个主要影响因素进行讨论,如图3~图7所示。
3.1 转向柱输出轴转动惯量 Je对转向路感的影响
从图 3可知,由伯德图可看出,低频段变化不大,高频段总体趋势是幅值变大,带宽增大,并且这种变化随着Je值的减小而明显。由Nyquist图可以看出,该系统是稳定系统。
3.2 输出轴粘性阻尼系数Be对转向路感的影响
由图4可知,随着Be的减小,超调量增大,响应时间缩短。由伯德图可以看出在高频段,幅值减小,带宽减小,并且其变化的趋势随着Be的减小越来越明显。
3.3 转向柱到前轮的传动比 n对转向路感的影响
由图 5可知,从阶跃响应可以看出,随着传动比 n的增大,响应时间增大。从伯德图可以看出,传动比对幅值和带宽的影响不明显。但总体趋势是在低频段随着传动比值的增加,带宽减小,并且这种趋势随着n值的增大而不明显。
3.4 轮毂电机转矩增益差值 Km对转向路感的影响
由图6的阶跃响应曲线可知,随着Km的增大,响应时间缩短;由伯德图可知,在低频段,随着Km值的增加,带宽增加,其变化的趋势随着 Km的增加而不明显。
3.5 转矩传感器刚度Ks对转向路感的影响
由图 7可知,从阶跃响应曲线可以看出,随着Ks的增加,响应时间缩短;从伯德图可以看出,在低频段,随着Ks的增加,相位滞后减小,在高频段,随着Ks的增加,幅值增大,带宽增大,并且这种趋势随着Ks的增大而不明显。
4 结 论
建立了整车 3自由度模型、转向轴模型、永磁无刷直流轮毂电机模型和输出轴子模型,并对影响转向路感的影响因素进行了分析,其中各参数对转向路感的影响由阶跃响应图和伯德图反映出来,为以后的进一步研究打下了基础。目前,轮毂电机驱动技术还不成熟,今后可以采用其他的转向性能评价指标进行深入的研究[10]。
[1]王玲珑,黄妙华.轮毂式电动汽车驱动系统发展综述[J].北京汽车,2007(1):35-36.
[2]胡长健. 电动轮驱动车辆的驱动力助力转向技术研究[D]. 长春:吉林大学,2008.
[3]王军年. 电动轮独立驱动汽车差动助力转向技术研究[D]. 长春:吉林大学,2009.
[4]赵万忠,王春燕,孙培坤,等. 基于质量工程的电动轮汽车差速转向集成优化方法初探[J].中国科学,2012,42(2):188-194.
[5]熊露,余卓平.轮毂电机驱动电动汽车各轮毂电机扭矩分配算法的仿真和评价[J].计算机辅助工程,2010(1):27-31.
[6]杨养户.电动汽车轮毂电机技术[M]. 北京:机械工业出版社,2012:44-47.
[7]孙旭东,王善铭.电机学[M].北京:清华大学出社,2006,180.
[8]朱绍中,姜炜,余卓平,等. 基于控制分配的轮毂电机驱动电动车稳定性控制仿真研究[J]. 系统仿真学报,2008(18):77-79.
[9]卢东斌,李建秋,何涛,等. 四轮轮毂电机驱动电动汽车无刷电机控制算法的研究[J]. 汽车工程,2012,34(10):11-17.
[10]魏海峰.轮毂电机驱动电动车复合制动控制实验研究[J]. 江苏科技大学学报(自然科学版),2011(2):56-59.
[11]瞿飞俊,舒红宇. 陈齐平,等. 电动代步车轮毂电机驱动控制系统的设计与实现[J]. 机械管理开发,2011(6):7-8.
[12]宁国宝,王阳,余卓平. 后轮轮毂电机驱动电动汽车的液压复合制动系统匹配方法[J]. 汽车技术,2009(11):15-20.
猜你喜欢
防爆电机(2022年2期)2022-04-26
汽车实用技术(2022年5期)2022-04-02
昆明医科大学学报(2021年12期)2021-12-30
防爆电机(2021年5期)2021-11-04
小读者(2021年2期)2021-03-29
汽车实用技术(2021年3期)2021-02-24
汽车观察(2018年10期)2018-11-06
电机与控制学报(2018年9期)2018-05-14
车迷(2017年10期)2018-01-18
北京汽车(2017年3期)2017-10-14
