基于多信号模型的综合化航电系统综合诊断算法设计*
2014-03-18 05:49文佳
电讯技术 2014年3期
文 佳
(中国西南电子技术研究所,成都610036)
1 引 言
随着现代航空电子技术突飞猛进的发展以及战机对航电系统功能需求的快速提升,航电系统的设计不断朝着综合化和一体化的方向发展,从第一代“分立式”到第二代“联合式”,再到第三代“数字系统综合”,最后到第四代高度综合化(射频综合),航电系统实现了模块化的架构设计以及数字与射频资源的高度共享,功能更加强大,容错能力更强[1-2]。但是,高度综合化带来的功能重构与子系统之间边界模糊使得整个航电系统异常复杂,其故障现象更是复杂多变,具有复杂性、层次性、相关性和不确定性的特点,给航电系统的故障诊断带来极大的难度和挑战[3]。与此同时,机上BIT(Built-in Test)系统故障诊断能力的不足,以及机上与机下构成诊断能力的各要素之间缺乏综合考虑和统一的规划,使得飞机航电系统的故障诊断能力已经无法满足当前高度综合化情况下航电系统故障诊断的要求[4]。因此,迫切需要对航电系统的综合诊断技术进行研究,实现以最少的费用达到最有效的检测,隔离装备内已知的或预期发生的所有故障,以满足航电系统任务要求[5]。
综合诊断技术的核心是故障综合诊断算法。只有将机上与机下,以及机上各层次的故障诊断算法的有机融合,才能实现故障的综合诊断,提高故障诊断效能。多信号模型是在系统结构和功能分析的基础上,以分层有向图表示信号流导向和各组成单元(故障模式)的构成及相互连接关系,并通过定义信号(功能)以及组成单元(故障模式)、测试与信号之间的关联性,来表征系统组成、功能、故障及测试之间相关性的一种模型表示方法[6]。基于多信号模型的故障诊断具有如下特点[7-10]:一是多信号模型类似于在结构模型上覆盖上依赖模型的集合,建模与系统的原理简图密切相关,便于复杂系统模型的分层建立、集成、校验和更新;二是模型适应面广,可以综合考虑电应力、温度和振动环境的影响,在测量信号的选择上,既可考虑单个测点测单个信号或特征,也可以考虑单个测点测量多个信号或特征;三是诊断推理速度快,算法鲁棒性和通用性好;四是能有效诊断复杂系统多故障并发情况。上述特点使得基于多信号模型的故障诊断方法非常适合复杂电子系统的综合诊断,并且近10年来在美国航空航天领域得到了广泛的研究和应用[11-13]。
鉴于多信号模型在测试性建模以及故障诊断方面的优势,本文在分析总结综合化航电系统的故障发生特征及其故障诊断算法设计要求的基础上,设计了基于多信号模型的综合诊断算法,包括算法总体架构、诊断流程和算法模块的设计,并对综合诊断算法的设计流程进行梳理,为工业部门进行航电系统综合诊断算法的设计提供参考。
2 需求分析
2.1 故障特征分析
现代战机的航电系统属于高度综合化的复杂系统,其故障的发生具有复杂性、层次性、相关性和不确定性等4 个特征。
(1)复杂性
航电系统一体化综合设计的直接结果是带来了多种传感器资源的共用,以及模块的通用化设计。对于共用的模块或其他资源而言,其故障带来的影响是复杂的,可能引起多个功能线程的失效,再考虑到故障后的系统重构或基于不同使用任务需求的资源配置,系统的故障表现更加复杂,给系统的故障诊断带来了巨大的挑战。
(2)层次性
航电系统属于多层次系统,自顶向下一般可划分为系统、子系统、功能线程、模块、最小功能电路单元和元器件。系统的层次性决定了其故障纵向传递的层次性。任何故障都是与系统的某一层次相联系的,高层次的故障可以由低层次故障所引起,而低层次的故障必定引起高层次的故障。航电系统故障的这种纵向传递关系可以在其失效模式与效果分析(FMEA)中得到体现,并最终反映到故障诊断算法的设计中。
(3)相关性
航电系统内部同层次的模块之间、模块内部功能电路单元之间都存在负责的交联关系,任何一个原发故障都存在多条潜在的传播途径,从而导致关联故障的发生,这就是系统故障的相关性,也称为故障的“横向性”。故障的相关性是导致系统故障现象复杂、诊断困难的主要原因。但是,在对故障发生和传播过程进行测试性建模后,故障传递这种相关性也是基于模型的故障诊断推理的重要依据。
(4)不确定性
从微观层次来说,航电系统内部电子器件故障的发生本身具有偶发性和随机性;从宏观层次来说,航电系统功能重构使得故障传播的纵向和横向传播途径发生变化。微观器件故障发生的不确定性和宏观故障传播途径的不确定性,使得航电系统的故障发生具有不确定性的特点。
2.2 综合诊断算法设计要求
结合综合化航电系统故障发生的特点以及当前航电系统测试性设计的现状,可以确定航电系统综合诊断算法设计的要求。
(1)提高检测率,降低虚警率
在BIT 发展过程中,虚警问题一直是困扰现役武器系统,特别是航空武器系统的重大难题。美军F15 上的BIT 系统存在严重的虚警问题,据美国空军试验和评价中心的分析报告,BIT 的虚警率高达85%[14]。由于综合化航电系统故障发生的复杂性、相关性和不确定性特点,使其故障诊断的难度大,虚警率高,主要体现为测试门限的设置不合理、关联故障难以消除。因此,综合诊断算法设计的一个重点就是在算法的不同层次对虚警进行控制,在保证故障检测率的前提下,最大限度降低虚警率。
(2)考虑多故障并发情况
综合化航电系统属于复杂系统,内部包含的LRU/LRM 数量众多,故障并发的概率增大;同时,对于一些关键模块,不可能频繁地进行测试维护,进一步增加了多个故障同时存在的可能。因此,多故障并发成为航电系统故障诊断时不可忽视的问题,在综合诊断算法设计时必须考虑。
(3)提高故障隔离率,降低模糊组
鉴于机内测试设备(BITE)设计过程中独立测试电路对航电系统硬件功能电路体积、重量和可靠性的影响,即使在引入逻辑测试点的情况下,测试点的数量依然难以支持隔离所有的故障到单个模块。在这种情形下,进行诊断算法设计时如何综合各种测试诊断因素,最大限度地利用收集的测试信息,从而降低模糊组,提高系统隔离度,成为综合诊断算法设计的关键。
3 诊断算法架构设计
考虑到综合化航电系统故障发生的特点以及对综合诊断算法的要求,再结合多信号模型在测试性建模以及故障诊断方面的优势,本文构建了基于多信号模型的综合化航电系统综合诊断算法框架,如图1所示。

图1 综合诊断算法架构Fig.1 The framework of integrated diagnostic algorithm
综合诊断算法架构主要包括工作维和技术维两部分。其中,工作维是指航电系统机上与机下的整个故障诊断过程以及故障诊断过程使用的各个诊断算法模块;技术维与工作维相对应,是指综合诊断过程中应用的诊断算法和技术。
在工作维中,航电系统的故障诊断主要包括机上诊断和在线诊断两大部分。机上诊断分为三个层次:LRU/LRM 级故障诊断、子系统级(如CNI 子系统、雷达子系统和电子战子系统)故障诊断和系统级故障诊断。其中,LRU/LRM 级故障诊断主要负责测试点信息的采集与预处理,输出LRU/LRM 测试点矩阵到子系统;子系统级故障诊断主要实现对子系统测试点矩阵的防虚警处理以及子系统级故障的初步诊断,并输出相关诊断结果到系统级;系统级故障诊断通过综合运用各子系统上报的故障信息,完成对子系统上报的故障诊断结果的确认以及故障的进一步隔离(主要针对各子系统间的交联故障)。在线诊断作为机上诊断的重要补充,将在地面维护时对机上BIT 的故障诊断结果进行确认,以及对机上无法准确定位的故障模糊组做进一步的诊断隔离。
与工作维对应,可以得到综合诊断算法的技术维,即关键技术,主要包括:LRU/LRM 级故障诊断算法,包括小波降噪方法、多次平均方法;基于TEAMS 软件的多信号建模技术,包括仅考虑电应力参数的多信号建模以及综合考虑温度、振动等环境参数的多信号建模;基于多信号模型的故障诊断推理算法,包括基于D 矩阵的实时推理算法和基于贝叶斯最大后验概率和拉格朗日松弛的故障精确推理算法;基于多信号模型的交互式诊断算法。
4 综合诊断流程设计
首先,LRU/LRM 级故障诊断模块对模块内部测试点采集上来的测试参数进行一些必要的信号预处理(包括虚警处理和特征提取)以及初步诊断,判断测试参数是否在正常的范围内,给出测试通过/不通过的结果,输出模块测试点矩阵(通过/故障、0/1矩阵)。
各模块采集的测试点矩阵通过数据总线传送到其所属子系统的健康管理单元。若子系统内所有模块的测试点矩阵都是0 值,即测试都通过,则子系统无故障;若有测试点报故,则启动子系统级故障推理模块。
子系统级故障诊断推理模块包括子系统级防虚警处理子模块、子系统级实时推理子模块和子系统级精确推理子模块3 个子模块。子系统级故障诊断流程如图2所示。首先,由子系统级防虚警处理子模块对输入的测试点矩阵进行虚警校验,判断是否存在虚警的测试点。若存在虚警,则对虚警进行修正,并给出修正后的测试点矩阵,然后进入故障诊断流程;若不存在虚警,则直接进入诊断流程。故障诊断包括快速诊断与精确诊断两种方式,分别对应子系统级实时推理子模块和子系统级精确推理子模块。根据BIT 工作模式,选择诊断方式,一般在加电BIT和周期BIT 模式下,选择快速诊断方式;在维护BIT模式下,选择精确诊断方式。

图2 子系统级故障诊断流程Fig.2 Fault diagnostic workflow of sub-system
系统级主要完成故障确认与增强诊断两个功能。各子系统的故障信息上报给系统级以后,首先进行故障确认,通过对各子系统上报的故障诊断结果进行综合比较,判断是否在系统层次存在冲突矛盾;若存在矛盾,则需要重新进行故障诊断,进入系统级故障诊断推理流程;若不存在矛盾,则综合各子系统的诊断结果进一步判断是否需要在系统级做故障隔离(针对子系统间交联故障,例如跨子系统功能的公共资源故障),若不需要,则流程结束,上报故障诊断结果;若需要进一步隔离,则进入系统级故障诊断流程。系统级故障诊断流程由系统级故障诊断推理模块完成,主要包括虚警处理与故障诊断两个步骤。
在线诊断主要是通过测试设备与PMA(便携式维修装置)相互配合来完成机上诊断结果的确认与故障模糊组的进一步隔离。PMA 内嵌入了在线诊断模块,在线诊断模块根据机上诊断结果(包括测试点矩阵和故障模糊组),分析得出最优的交互式故障诊断流程,以测试指令的形式展现给用户,包括每一步测量使用到的测试设备、测试参数、故障判据、操作步骤。外场维修人员根据PMA 的指示,操作测试设备与飞机有线或无线连接,得到相应的测试参数数据,由维修人员人工判故或者将测试数据输入PMA 自动判故,最终实现故障的确认与模糊组进一步隔离。
5 诊断算法模块设计
由综合诊断算法架构可以得到综合诊断的算法模块组成,如图3所示。

图3 综合诊断算法模块组成Fig.3 The composition of integrated diagnostic algorithm
下面对各诊断算法模块的主要功能、算法原理、输入数据和输出结果进行阐述。
5.1 LRU/LRM 级故障诊断模块
LRU/LRM 级故障诊断模块的主要功能是对模块内部测试点采集上来的测试参数进行一些必要的信号预处理(包括虚警处理和特征提取)以及初步的诊断,判断测试参数是否在正常的范围内,最终输出模块测试点矩阵(通过/故障、0/1 矩阵)。
LRU/LRM 级故障诊断模块内嵌的算法主要包括多次平均与小波降噪方法。这两种方法的核心都是降低噪声的影响,从而降低虚警。相对多次平均方法,小波降噪方法降噪效果更好,但处理时间较长。在工程操作上,需要首先对航电系统的测试参数进行梳理,然后根据不同参数的特点以及测试性要求选择其适用的方法。
5.2 系统级/子系统级诊断推理模块
5.2.1 系统级/子系统级防虚警处理子模块
系统级/子系统防虚警处理子模块主要完成虚警校验和虚警修正两个功能。其基本原理是利用测试性模型中的信号流和逻辑规则建立测试点之间的约束关系,对输入的测试点矩阵进行虚警校验,若测试点矩阵不满足约束关系,则判断存在虚警,找出发生虚警的测试点,进行虚警修正。
系统级/子系统防虚警处理子模块包括两部分:一是系统/子系统D 矩阵(由测试性建模导出);二是防虚警推理机,以D 矩阵和测试点矩阵为输入,判断测试点矩阵是否满足D 矩阵约束关系。若满足,则给出通过虚警校验的结果;若不满足,则找出不满足约束关系的测试点(报虚警的测试点),进行虚警修正,最后给出修正后的测试点矩阵。防虚警推理机与建立测试性模型无关,可以独立设计开发。
5.2.2 系统级/子系统级快速诊断子模块
系统级/子系统级快速诊断子模块主要根据输入的测试点矩阵,基于多信号模型进行快速诊断,输出故障子系统(系统级诊断)或故障模块(子系统级诊断)。快速诊断的特点是诊断速度快,实时性好,但是对模糊组的隔离能力不强。
系统级/子系统级快速诊断子模块包括系统级/子系统D 矩阵(可由TEAMS 软件导出)和快速诊断推理机两部分。
快速诊断推理机工作原理如下:通过定义系统中元件状态即G(正常)、B(故障)、S(可疑)、U(状态未知),在诊断推理的开始,先假定系统所有元件的状态为未知状态。针对测试点矩阵中的每一个测试,由D 矩阵找到与该测试相关的元件,若该测试通过,则该测试相关元件的状态设置为G;若测试失败,则将相关元件的状态设置为S;故障元件(B)是在可疑故障元件(S)中不断剔除正常元件(G)而获得的。快速诊断推理机这种基于排除的诊断方法可以有效解决航电系统的多故障诊断问题。
5.2.2 系统级/子系统级精确诊断子模块
系统级/子系统级精确诊断子模块的功能与系统级/子系统级快速诊断子模块相同,但是诊断精度更高,能有效降低模糊组规模,缺点是耗时相对较长。因此,一般只在维护BIT 模式下使用。
系统级/子系统级精确诊断子模块包括三个部分:系统级/子系统D 矩阵、系统级/子系统先验信息矩阵和精确诊断推理机。
精确诊断推理机的工作原理是以系统多信号模型为基础,结合系统先验故障概率计算系统中各元件的后验故障概率,以后验故障概率最大为故障定位的准则,并利用拉格朗日松弛算法进行求解,实现复杂系统的故障定位,具体过程可参见文献[4]。
5.3 在线诊断推理模块
在线诊断模块的功能包括生成交互式诊断流程和故障自动匹配。其中,在线诊断模块中的交互式诊断流程可由测试性建模软件自动生成,通过在测试性软件中设置测试点的不同属性,机上测试和在线测试,生成机上测试不能完全隔离的模糊组及其对应的在线交互式测试流程。在线诊断模块记录在线诊断流程及其与模糊组的对应关系,当机上诊断输出模糊组信息时,在线诊断模块自动匹配出对应的在线交互式诊断流程,并输出到PMA 界面,指导用户排故。
6 算法设计流程
综合诊断算法的设计流程如图4所示,包括的工作项目有:测试性信息收集;测试性建模及D 矩阵生成,在测试性信息收集完成后开始;公共推理模块设计,综合诊断算法的核心算法,指公共调用算法模块的设计,包括防虚警推理机、快速诊断推理机和精确诊断推理机的设计;LRU/LRM 级故障诊断模块设计;在线诊断模块设计,在测试性建模的基础上完成;系统/子系统故障推理模块设计,在系统/子系统D 矩阵和公共推理模块的基础上进行集成设计开发。
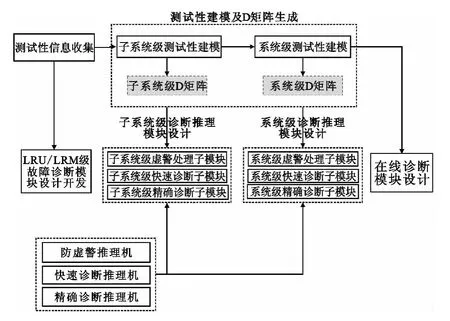
图4 综合诊断算法设计流程Fig.4 Design process of integrated diagnostic algorithm
6.1 测试性信息收集
综合诊断算法设计所需的测试性信息包括:产品设计资料,包括整个系统功能原理框图、产品功能说明,系统信号流图等;产品可靠性信息,包括系统故障模式及影响性分析(FMECA)报告、可靠性参数信息(如失效率或平均故障时间);产品测试性材料,包括系统测试点位置分布图、各个测试点信息说明(包括测试参数、采用的测试设备、测试需要时间、成本等)。
6.2 测试性建模
采用TEAMS 软件构建航电系统的多信号模型。多信号模型是进行故障诊断的基础,模型的准确与否直接关系到诊断算法的准确程度,因此,建模完成后必须请有经验的设计师对测试性模型进行核查,保证模型的正确性和完整性。
由于航电系统属于复杂的多层次系统,其研发一般采用系统集成的方式,不同层次产品的研发主体可能不同。考虑到这个因素,在测试性建模时也往往采用不同层次研发单位分别构建各自层次的模型,最后由系统研发主体进行集成和验证的开发方式。航电系统的测试性建模一般分为以下4 个步骤:
(1)系统层次划分,明确不同层次建模的责任主体和建模要求;
(2)初步测试性模型构建,包括构建各个层次的结构模型,以及添加信号到模块和测试点;
(3)模型调整。构建初步测试性模型后,在下列一些情况下,模型需要进行必要的修正和调整[15]:
1)如果一个系统有一些组件能够阻断(block)一个信号集或完全故障,则应为这些组件定义一个被阻断信号集;
2)如果一个系统有一些组件能够映射一个或多个信号到另一个信号子集,则需为这些组件定义一组映射函数;
3)如果一个复杂信号(或函数)是由一组简单信号(或函数)构成,则可将这些简单(或底层)信号组合为一个复杂信号或超信号;
4)如果一个系统存在冗余(如A 和B 都故障,系统才故障),则使用“并联—AND”节点对冗余部分建模;
5)如果一个系统有不同的运行模式,则使用“转换—Switch”节点建模;
6)如果一个系统有可更换数字集成电路,则采用等效模型。等效模型是芯片的简化模型,包含在芯片中检测故障(而不是隔离故障)必要的相关性信息;
(4)模型集成与验证。在得到各层次的测试性模型后,一般由系统级研发主体对模型进行集成与有效性验证,最终得到完整正确的航电系统测试性模型。
7 结 论
本文分析了现代综合化航电系统的故障特征,总结了其故障诊断算法的设计要求,为综合化航电系统故障诊断算法的设计提供了依据;设计的综合诊断算法考虑了机上不同层次诊断以及在线诊断的要求,具有层次清晰、架构合理的特点;在系统级与子系统级故障诊断时给分别出了快速诊断与精确诊断两种方式,既满足了加电BIT 与周期BIT 模式下快速实时诊断的要求,又提高了维护BIT 模式下的故障诊断精度;设计了与机上诊断完全融合的地面交互式诊断模块,进一步提高了航电系统的故障诊断能力,实现了航电系统的综合诊断。最后,针对航电系统现有的研发体制,设计了系统集成研发模式下综合诊断算法的设计流程,为工业部门在研制阶段进行航电系统综合诊断算法的设计开发提供支持。
[1] Moir I,Seabridge A. Military Avionics System[M]. New Jersey:John Wiley & Sons Ltd.,2006.
[2] 霍曼,邓中卫. 国外军用飞机航空电子系统发展趋势[J].航空电子技术,2004,35(4):5-10.HUO Man,DENG Zhong- wei. Development Trend of Foreign Military Avionics [J]. Avionics Technology,2004,35(4):5-10.(in Chinese)
[3] 邓森,景博. 基于测试性的电子系统综合诊断与故障预测方法综述[J]. 控制与决策,2013,28(5):641-649.DENG Sen,JING Bo. Summary of integrated diagnostics and prognostics method based on testability for electronic system[J]. Control and Decision,2013,28(5):641-649. (in Chinese)
[4] 连可. 基于状态监测的复杂电子系统故障诊断方法研究[D]. 成都:电子科技大学,2008.LIAN Ke. Study on State Detection Based Fault Diagnosis Method of Complicated Electronic System [D]. Chengdu:University of Electronic Science and Technology of China,2008. (in Chinese)
[5] 林典雄,李岩,张勇. 航空装备综合诊断的现状与发展设想[J]. 航空工程进展,2011,2(3):349-354.LIN Dian-xiong,LI Yan,ZHANG Yong. Current Status and Prospect of Integrated Diagnostics on Aviation Equipment[J]. Advances in Aeronautical Science and Engineering,2011,2(3):349-354. (in Chinese)
[6] 孔令宽. 基于多信号模型的卫星故障诊断技术研究[D]. 长沙:国防科学技术大学,2009.KONG Ling-kuan. Research on Satellite Fault Diagnosis Based on Multi-signal Model[D]. Changsha:National University of Defense Technology,2009. (in Chinese)
[7] 杨智勇,许爱强,牛双诚. 基于多信号模型的系统测试性建模与分析[J]. 工程设计学报,2007,14(5):365-368.YANG Zhi-yong,XU Ai-qiang,NIU Shuang-cheng.Model and analysis of system testability based on multi signal model[J]. Journal of Engineering Design,2007,14(5):365-368. (in Chinese)
[8] 石君友,张鑫,邹天刚. 多信号建模与诊断策略设计技术应用[J]. 系统工程与电子技术,2011,33(4):811-815.SHI Jun-you,ZHANG Xin,ZOU Tian-gang. Application of multi-signal modeling and diagnosis strategy design technology[J]. Systems Engineering and Electronics,2011,33(4):811-815. (in Chinese)
[9] Pattipati K,Deb S. Computationally efficient algorithms for multiple fault diagnosis in large graph- based systems[J]. IEEE Transactions on Systems,Man and Cybernetics,2003,33(1):73-85.
[10] 何光进,叶晓慧,王红霞. 多信号模型在故障诊断中的应用[J]. 计算机测量与控制,2009,17(1):25-27.HE Guang- jin,YE Xiao- hui,WANG Hong- xia.The Application of Multi-signal Model in Fault Diagnosis[J]. Computer Measurement & Control,2009,17(1):25-27. (in Chinese)
[11] Deb S,Sudipto G,Amit M,et al.Multi-signal Modeling for Diagnosis,FM ECA,and Reliability[C]//Proceedings of 1998 IEEE International Conference on SMC.San Diego,CA:IEEE,1998:3026-3031.
[12] Deb S,Pattipati K R,Shrestha R.Model-based Testability Assessment and Directed Troubleshooting of Shuttle Wiring Systems[C] //Proceedings of 2001 SPIE Aerosense.Orlando,FL:IEEE,2001:163-173.
[13] Deb S,Charles D,Sudipto G,et al.Remote Diagnosis of the International Space Station Utilizing Telemetry Data[C]//Proceedings of 2001 SPIE Aerosense. Orlando,FL:IEEE,2001:16-20.
[14] 徐永成,温熙森,易晓山. 机内测试虚警原因的分析及其解决方案[J]. 振动、测试与诊断,2002,22(1):37-42.XU Yong-cheng WEN Xi-sen,YI Xiao-shan. Causes and Solutions to Built- in Test False Alarm[J].Journal of Vibration,Measurement & Diagnosis,2002,22(1):37-42. (in Chinese)
[15] 田华明,孙华,赵宏家. 复杂电子系统的TEAMS 测试性研究[J]. 测控技术,2009,28 (9):72-76.TIAN Hua-ming,SUN Hua,ZHAO Hong-jia. Study on TEAMS test ability of complex electronic systems[J]. Measurement & Control Technology,2009,28(9):72-76. (in Chinese)
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
水泥工程(2022年2期)2022-08-22
军民两用技术与产品(2022年1期)2022-06-01
铁道通信信号(2020年3期)2020-09-21
水电站设计(2020年4期)2020-07-16
上海大学学报(自然科学版)(2020年4期)2020-05-24
电子制作(2019年7期)2019-04-25
铁道通信信号(2018年8期)2018-11-10
电子产品可靠性与环境试验(2016年6期)2016-05-17
通信电源技术(2016年3期)2016-03-26