
基于滑模控制的车车协同主动避撞算法
2014-03-19 08:24王庞伟余贵珍王云鹏
北京航空航天大学学报 2014年2期
王庞伟 余贵珍 王云鹏 王 迪
(北京航空航天大学 交通科学与工程学院,北京 100191)
最近几年来高速公路交通事故居高不下,其中追尾碰撞事故占75%以上[1-2].为提高汽车在高速行驶过程中的主动安全性能、降低追尾碰撞事故发生率,迫切需要研发高性能的汽车主动避撞系统.汽车主动避撞系统利用现代信息技术和传感技术,将获取的外界信息(如车速、障碍物距离等)传递给驾驶员,同时在路况与车况的综合信息中辨识是否存在安全隐患,在紧急情况下能自动采取措施控制汽车,使汽车能主动避开危险,保证汽车安全行驶[3-4].
各国为构建更安全的交通系统,在汽车主动避撞系统辅助或者取代驾驶员操作方面取得了一定的研究成果.文献[5-7]中,在研究车辆主动安全控制系统时,基于车辆动力学原理,提出了一种状态空间方程描述的非线性车辆纵向动力学系统控制模型.文献[8-9]中,将非线性车辆系统状态空间线性化方法与滑模控制理论相结合,通过计算车辆的理想加速度完成车辆主动避撞.文献[10]中,将汽车纵向动力学系统与汽车横向方向角控制系统进行耦合,分析其耦合特性,并分别采用滑模控制和动力学方法综合控制汽车安全性.文献[11]中,通过车车之间的通信建立车辆信息网,通过获取车辆换道过程中周围车辆运行状态来建立车辆动力学模型,计算出期望加速度值来控制车辆节气门和制动踏板输出,从而实现了公路上车辆换道时的紧急避撞.
综上所述,目前常用的车辆主动避撞算法是以后车为控制对象实现避撞,在车距小于安全距离情况下采取紧急制动[12].但实际运用中采取紧急制动不仅使驾驶员、乘客感到不适,而且还会增加燃料的消耗和轮胎的磨损[13-14];并且在车间距过小时仅依靠后车制动无法完成避撞,仍然会造成追尾事故.基于汽车纵向动力学控制理论和车车通讯技术,本文提出了一种改进的主动避撞算法,建立协同状态下的车车协同运动模型;从汽车行驶的舒适性出发,基于后车实时计算期望加速度;同时把后车的车间距和车速信息传送给前车,通过加速度分配对前后车进行加减速控制,这样在保证减速度在驾驶舒适性范围内基础上通过前后车协同控制来避免事故发生,并用汽车动力学软件CarSim和Matlab/Simulink进行联合仿真验证了算法的可行性.
1 汽车协同主动避撞系统结构
汽车协同主动避撞系统由信息采集单元、信息处理单元和信息输出单元3部分组成.信息采集单元包括传感单元(毫米波雷达、车速传感器、加速度传感器、制动传感器、加速踏板传感器和路面情况选择开关等组成)、车车通讯单元(Wifi、Zigbee等)和定位单元(GPS、北斗等);信息处理单元主要为包含核心避撞算法的汽车电子控制单元(ECU,Electric Control Unit);信息输出单元包括执行机构(制动控制器、油门控制器等)、人机交互界面和报警机构等.图1为系统结构图.
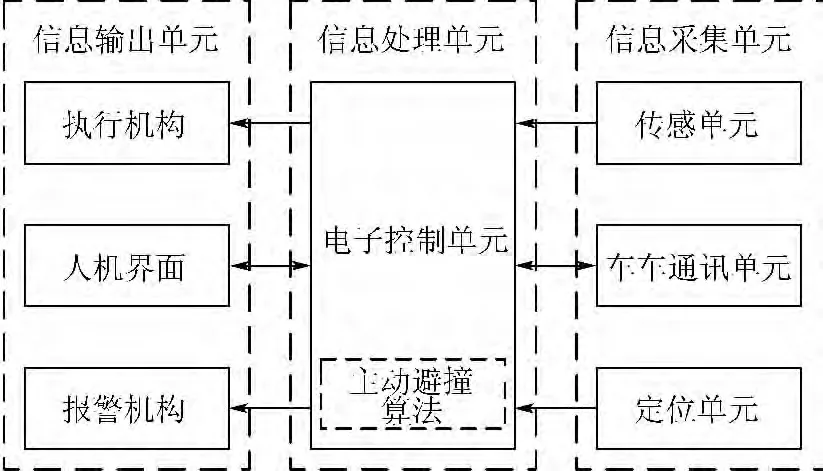
图1 汽车协同主动避撞系统结构
协同主动避撞系统工作过程中,由信息采集单元不断地采集相关信息并进行车车信息交互,如车间距离、相对速度、后车速度、有无制动等,并将此信息传送至信息处理单元.信息处理单元根据后车速度、相对速度建立期望加速度计算模型,由计算得出的期望加速度值作为汽车纵向控制的依据,然后交给执行机构包括制动踏板和油门踏板去完成车辆纵向控制,从而完成协同主动避撞功能.
2 协同主动避撞算法
根据协同主动避撞算法特点,首先根据前后两车的车距以及当前的车速信息,运用滑模控制理论计算当前情况下后车的理想减速度值,并根据与当前路面摩擦系数决定的最大制动减速度,比较计算得出期望减速度值,进而根据实际情况计算出分配给前车的加速度值,如图2所示.
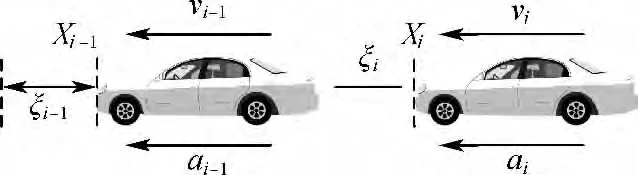
图2 车车协同运动模型
车车通讯单元采用WiFi无线通讯方式,基于IEEE802.11p 通信协议,采用 2.4GHz频段,考虑实际无线通信在数据传输时存在延误时间,在算法计算过程中用Δ表示.车辆组网环境下每辆车将自身传感器信息按照统一的通讯协议与其他车辆进行无线信息交互,通讯协议主要信息如表1所示.

表1 车车通讯协议主要信息
通过车车通讯信息交互,首先计算执行主动避撞需要的响应时间:

式中,T为汽车执行避撞响应时间;h为驾驶员固定反应时间.
根据后车当前车速,计算得出理想车间距:

式中,vi(t)为第i辆跟随车辆的速度;Dmin为当车队处于静止状态时连续两车之间保持的最小车间距.
此时两车车间距为

式中,xi(t),xi-1(t)为后车和前车的位移;l为车身长度.
从汽车应具有的制动能力来说,紧急制动时,为保证汽车行驶安全性,最大减速度一般为7.5~8m/s2;但在实际使用制动时,考虑到汽车驾驶舒适性[15],除紧急情况外,通常不应使制动减速度大于4m/s2.故在避撞算法设计时应将汽车平均制动减速度限制在3~4m/s2.
假设保证汽车驾驶舒适性最大减速度为ac,根据运动学方程:

保证汽车驾驶舒适性的最小距离为
所以当前理想车间距偏差如下:

式中,δi(t)为第 i辆跟随车辆的车间距偏差;ξi(t)为连续两车车间距.
车辆纵向控制器最佳控制效果为使所有车辆的车间距偏差和连续两车的相对速度之和趋向于0,根据滑模控制理论,以此依据选取滑模切换函数:

根据滑模控制理论,选取等速趋近律,建立滑模控制方程:

满足时,滑模切换函数Y→0,也就是δi(t)+
λ表示滑模控制器参数,在控制系统中代表趋近速度,如果λ很小,则趋近速度很慢,即调节过程偏慢;反之,如果λ比较大,则达到切换面时,系统具有较大的速度,这样将引起较大的抖动.参数选取时需要根据控制效果调整[16-17].
将式(7)代入式(8)得

将式(3)和式(6)代入式(9),展开:

从而可以计算得出后车理想加速度值为


ai(t)<0时,则当前情况车辆需要执行主动避撞,此时执行主动避撞可以保证汽车行驶的舒适性,避免了紧急刹车带来的安全隐患.
由当前地面和轮胎的附着系数决定最大制动减速度:

式中,μ为附着系数,文献[18-19]中有根据行驶信息估算附着系数的方法,干燥路面下可以计为常量;g为重力加速度.
比较式(11)和式(12)取最小值,后车期望减速度aF为

当aF=amax时,仅靠后车无法完成紧急制动,需要前车加速协同完成避撞,通过车车通讯分配给前车加速度aΔ为

由此算法计算得出前车期望加速度值,此时通过车车通讯获取前车车距ξi-1(t)信息,并判断是否满足车距条件:
当 ξi-1(t)≥Sc时,前车车距条件满足,前车可以执行加速避撞,期望加速度为

式中,aP为前车期望加速度;ai-1为前车理想加速度;aΔ为后车分配给前车的加速度.
当 ξi-1(t)<Sc时,则前车前方有障碍物,从而前车车距不满足条件,只能靠后车执行紧急制动完成避撞.
3 算法验证
3.1 CarSim和Matlab/Simulink联合仿真
CarSim是专门针对车辆动力学的仿真软件,能真实地模拟实际场景和车辆行驶状态,广泛地应用于汽车控制系统的开发.CarSim可以方便灵活地定义试验环境和试验过程,详细地定义整车各系统的特性参数和特性文件.将上述的协同避撞算法验证分析,需要按照实际情况搭建验证环境.根据实际情况,在CarSim动力学仿真软件中建立仿真环境,仿真环境界面如图3所示.
按照图3所示,此模型的输入量是当前车速和当前车距,输出量是目标节气门开度和目标制动压力,将实际的车速和车距反馈给输入,实现闭环控制.
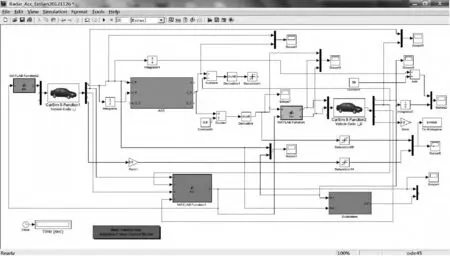
图3 CarSim和Matlab/Simulink联合仿真界面
仿真环境为200m直道和50m半径弯道的椭圆形道路干燥高速路面,按照本文算法要求仿真环境主要参数如表2所示.
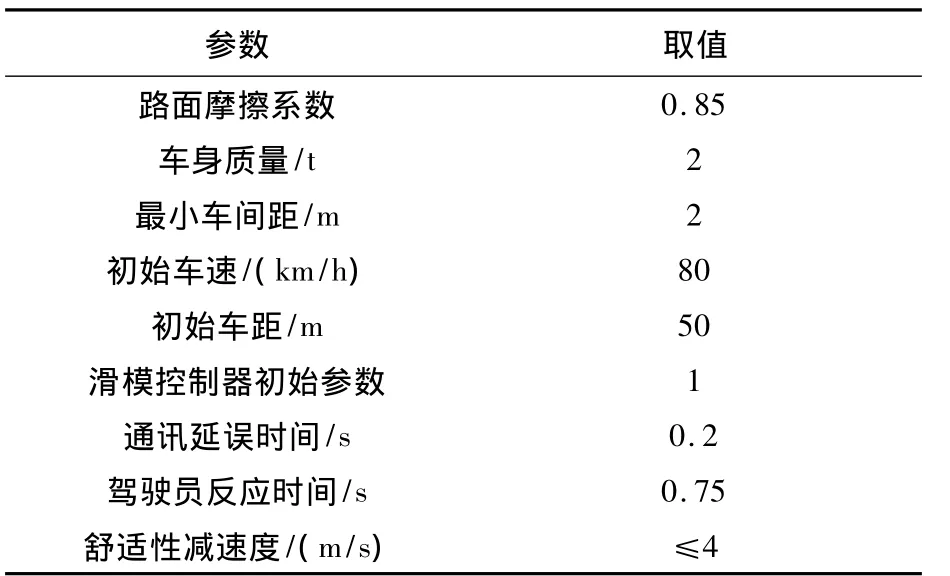
表2 仿真环境参数列表
为验证协同避撞算法,前车行驶的速度输入80 km/h急减速到20 km/h,车速输入曲线如图4所示.

图4 仿真环境中前车行驶曲线
3.2 仿真结果分析
根据搭建的算法仿真环境,分别加入传统主动避撞算法和协同主动避撞算法验证效果,仿真结果如下.
如图5所示,图5a为传统主动避撞算法位移仿真结果,结果说明在竖虚线标记时刻大约9 s左右后车位移超过了前车位移,发生了追尾事故;图5b改进为协同主动避撞算法后,后车位移始终在前车位移之后,未发生追尾事故.
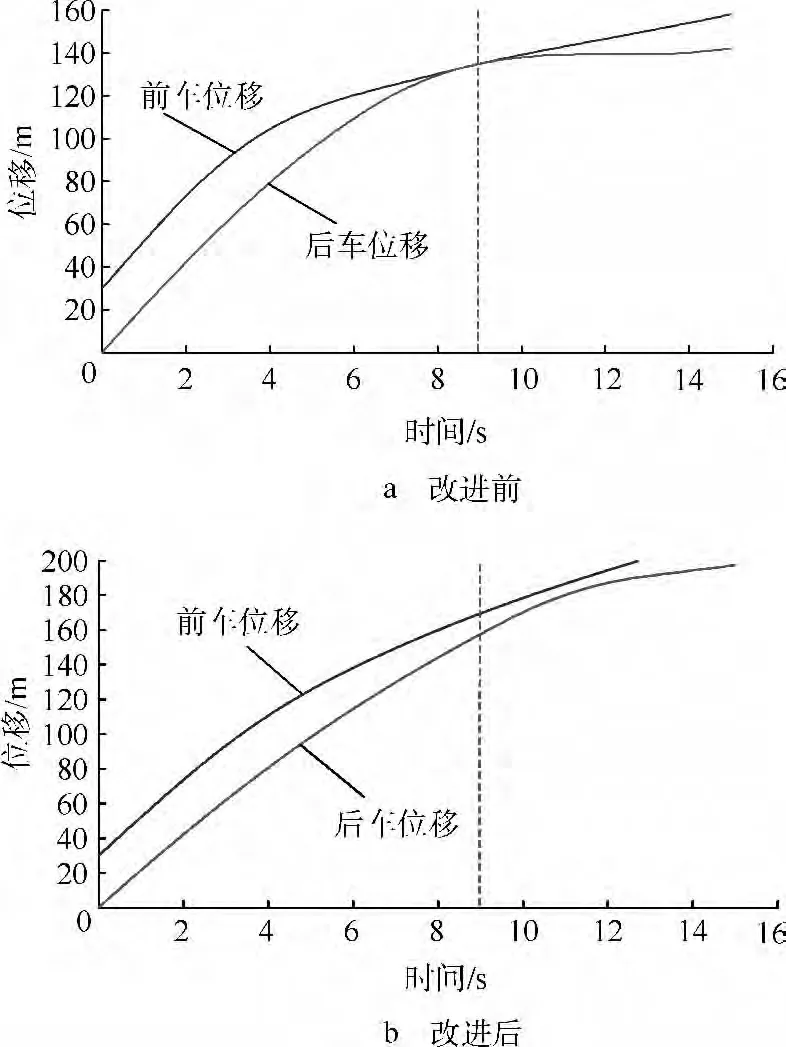
图5 避撞算法改进前后位移曲线对比
如图6所示,图6a改进算法前后车的减速度明显小于舒适度值,车辆会由于减速度过大导致紧急制动,容易引发安全事故;图6b的减速度始终控制在舒适度值之内,不会给车辆造成紧急制动,保证了驾驶员和乘客的舒适性.
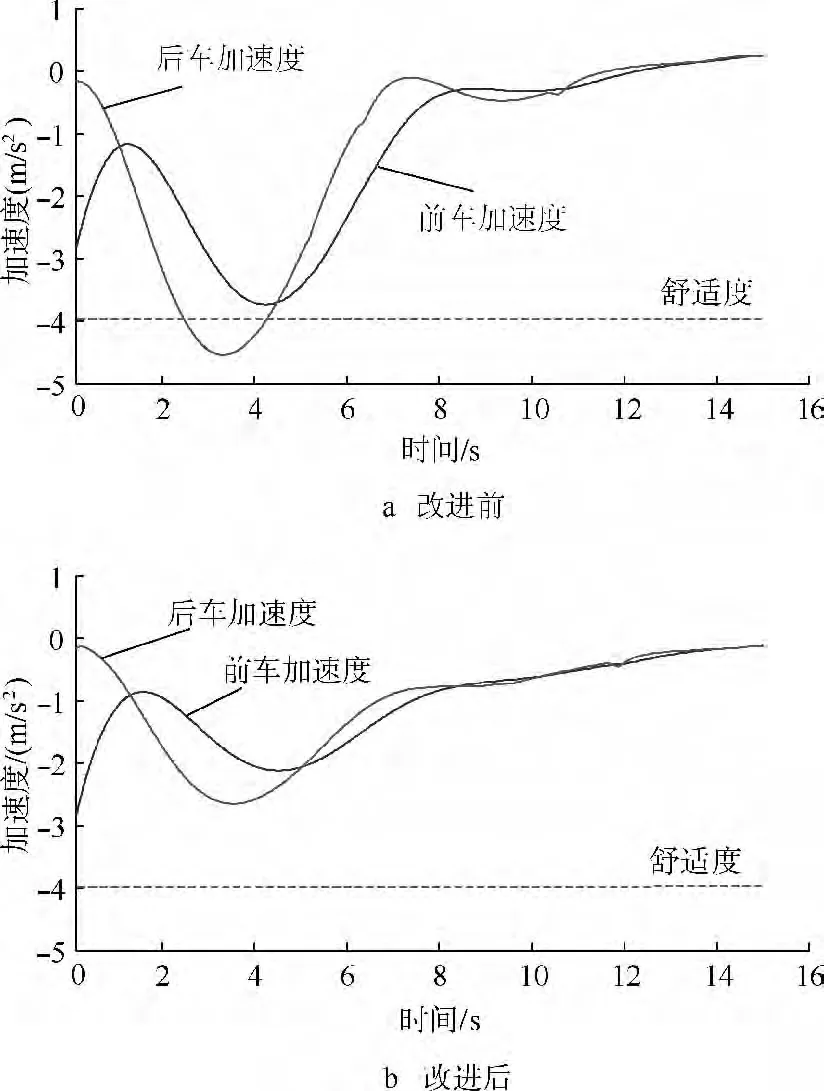
图6 避撞算法改进前后加速度曲线对比
如图7所示,图7a改进算法前前车和后车的车速迅速减到20 km/h,车辆发生了紧急制动,车辆行驶存在安全隐患;图7b改进算法后,两车车速不会迅速减到20 km/h,两车没有采取紧急制动,车辆行驶不存在安全隐患.

图7 避撞算法改进前后车速曲线对比
利用CarSim仿真软件得出的仿真效果如图8和图9所示.两车在设定的仿真环境中行驶,改进避撞算法前,两车会在9 s、位移130m左右发生追尾事故,改进为协同主动避撞算法后,在9 s时刻由前后车进行加速度分配,后车减速同时前车执行加速避撞,有效地避免了追尾事故的发生,并且两车的加速度范围均在舒适度范围内,避免了紧急制动造成的安全事故.

图8 避撞算法改进前发生追尾事故

图9 避撞算法改进后避免发生追尾事故
4 结论
本文在总结国内外汽车主动避撞系统和主动避撞控制方法基础上研究了车车协同主动避撞算法,避免了实际应用中紧急制动造成的安全事故和由于车距过近仅靠后车无法完成避撞的问题.本文依据车辆动力学系统特点和控制执行器结构特点建立的基于滑模控制的协同避撞算法,从汽车行驶舒适性出发,计算后车期望加速度,通过分配前后车加速度来完成协同主动避撞.搭建CarSim和Matlab/Simulink联合仿真环境较为准确地模拟实际系统的动态特性,验证了车车协同主动避撞算法可以保证汽车行驶舒适性和安全性,在遇到车距过近情况时通过加速度分配可使前后车协同完成避撞,弥补了传统主动避撞算法的不足.
References)
[1] Huang S,Yang J,Eklund F.Evaluation of remote pedestrian sensor system based on the analysis of car-pedestrian accident scenarios[J].Safety Science,2008,46(9):1345 -1355
[2]董红召,陈炜烽,郭明飞,等.基于车路一体化的车辆主动避撞系统关键技术的研究[J].汽车工程,2010,32(11):984-989 Dong Hongzhao,Chen Weifeng,Guo Mingfei,et al.A study on key technologies of vehicle active collision avoidance system based on VII technology[J].Automotive Engineering,2010,32(11):984-989(in Chinese)
[3]宋晓琳,冯广刚,杨济匡.汽车主动避撞系统的发展现状及趋势[J].汽车工程,2008,30(4):285 -290 Song Xiaolin,Feng Guanggang,Yang Jikuang.The current state and trends of automotive active collision avoidance system[J].Automotive Engineering,2008,30(4):285 -290(in Chinese)
[4]侯德藻,李克强,郑四发,等.汽车主动避撞系统中的报警方法及其关键技术[J].汽车工程,2002,24(5):438 -444 Hou Dezao,Li Keqiang,Zheng Sifa,et al.The warning algorithm and some key technologies of vehicle collision avoidance system[J].Automotive Engineering,2002,24(5):438 - 441(in Chinese)
[5] Fritz A,Schiehlen W.Nonlinear ACC in simulation and measurement[J].Vehicle System Dynamics,2001,36(2/3):159 -177
[6] Fritz A,Schiehlen W.Automatic cruise control of a mechatronically steered vehicle convoy[J].Vehicle System Dynamics,1999,32(4/5):331 -344
[7] Shiehlen W,Fritz A.Nonlinear cruise control concepts for vehicles in convoy[C]//IAVSD Symposium.Proceedings of the16th IAVSD Symposium.Pretoria:16th IAVSD Symposium,2000:256-269
[8] Ioannou P,Xu Z.Throttle and brake control systems for automatic vehicle following[J].Journal of Intelligent Transportation Systems,1994,1(4):345 -377
[9] Lu X Y,Tan H S,Empey D,et al.Nonlinear longitudinal controller development and real-time implementation[R].UCB-ITSPRR-2000-15,2000
[10] Lim EM H.Lateral and longitudinal vehicle control coupling in the automated highway system[D].Berkeley:University of California at Berkeley,1998
[11] Fawaz A,Artail H.Enhanced cooperative collision avoidance in sudden vehicle braking scenarios[C]//Telecommunications(ICT),2010 IEEE 17th International Conference on Industrial Engineering and Engineering Management.Doha:IEEE,2010:806-813
[12]庞迪.基于变结构滑模控制理论的汽车操纵稳定性控制策略研究[D].重庆:重庆大学,2005 Pang Di.A simulation and research on vehicle stability control system based on variable structure control system with sliding mode[D].Chongqing:Chongqing University,2005(in Chinese)
[13]刘筠,王剑华.加速度变化率对汽车制动器磨损特性的影响[J].长安大学学报:自然科学版,2007,27(6):95 -98 Liu Jun,Wang Jianhua.Effect of changing rate of acceleration on wearing character of automotive brake[J].Journal of Chang’an University:Natural Science Edition,2007,27(6):95-98(in Chinese)
[14]黄靖.汽车碰撞过程中加速度特征对乘员损伤的影响分析[D].大连:大连理工大学,2009 Huang Jing.The occupant injury analysis of the character from acceleration curves on dummy during the vehicle crash process[D].Dalian:Dalian University of Technology,2009(in Chinese)
[15]徐毓娴,赵长德,孙旭东,等.集成加速度传感器及其在汽车舒适性评价中的应用[J].清华大学学报:自然科学版,1998,38(11):9 -15 Xu Yuxian,Zhao Changde,Sun Xudong,et al.Accelerometer and its application in vehicles comfort evaluation[J].Journal of Tsinghua University:Science and Technology,1998,38(11):9-15(in Chinese)
[16]张健,张鑫,李江.典型汽车碰撞模型自选参数的敏感性分析[J].汽车工程,2012,34(10):905 -910 Zhang Jian,Zhang Xin,Li Jiang.Sensitivity analysis on the selected parameters in typical vehicle collision models[J].Automotive Engineering,2012,34(10):905 -910(in Chinese)
[17]郑昊,康宁,蓝天.两车间距对超车过程轿车气动特性的影响[J].北京航空航天大学学报,2008,34(4):460 -464 Zheng Hao,Kang Ning,Lan Tian.Effect of spaces between cars on aerodynamic characteristics of cars in overtaking process[J].Journal of Beijing University of Aeronautics and Astronautics,2008,34(4):460 -464(in Chinese)
[18]黄晓明,代琦,平克磊.轮胎胎面与柔性路面摩擦接触的数值分析[J].公路交通科技,2008,25(1):16 -20 Huang Xiaoming,Dai Qi,Ping Kelei.Numeric analysis of friction contact between tread and flexible pavement[J].Journal of Highway and Transportation Research and Development,2008,25(1):16-20(in Chinese)
[19]和松,夏礼秀.高速公路路面摩擦系数的测试与评价[J].公路交通科技,2002,19(1):8 -15 He Song,Xia Lixiu.Friction coefficient mesurement and evaluation for lane surface of expressway[J].Journal of Highway and Transportation Research and Development,2002,19(1):8 -15(in Chinese)
猜你喜欢
大电机技术(2022年2期)2022-06-05
控制与信息技术(2021年2期)2021-07-23
汽车维护与修理(2018年1期)2018-04-04
北京航空航天大学学报(2017年4期)2017-11-23
作文周刊·小学一年级版(2017年27期)2017-08-10
北京航空航天大学学报(2016年7期)2016-11-16
爆笑show(2016年3期)2016-06-17
儿童绘本(2016年6期)2016-05-14
北京航空航天大学学报(2016年4期)2016-02-27
汽车维护与修理(2015年5期)2015-02-28
